一种基于信道状态信息的室内定位与身份识别的方法
本发明涉及无线网络与识别,特别是一种基于信道状态信息的室内定位与身份识别的方法。
背景技术:
1、随着5g无线通信技术的发展与成熟及6g技术的不断演进,室内定位技术得到快速的发展。室内位置感知技术已广泛应用于特殊人群定位、大型场馆管理、物联网、个人位置服务等领域,特别在应急场景,如消防救援、应急疏散、抗震救灾等,室内的位置信息显得尤为重要。但由于室内环境比较复杂,多径效应明显,且基于深度学习的指纹定位算法难以适应环境变化;加之,常见的基于wi-fi信号的室内定位算法需用多组收发链路,对普通家庭适用性较低;另外,传统基于参数的定位算法分辨力低、算法复杂、很难满足实时定位的需求。而身份识别对于居家养老、防盗、安全等方面发挥着重要的作用。实现普适、实时高效、高精度的定位算法并且同时可识别运动目标的身份仍是国内外的一大挑战。针对上述问题,本系统提出利用wi-fi信号的信道状态信息(channel state information,csi)的低成本、适用于大众的高精度位置感知、实时轨迹追踪、身份识别系统。
技术实现思路
1、本发明的目的在于提供一种基于信道状态信息的室内定位与身份识别的方法,能够实现设备普适、方便搭设,算法简单、可用于实时跟踪定位。
2、为实现上述目的,本发明提供如下技术方案:一种基于信道状态信息的室内定位与身份识别的方法,所述方法包括如下步骤:
3、步骤s1、令发射装置和接收装置、网卡及计算机开始工作,从接收装置的阵列天线中得到待检测的信道状态信息信号;
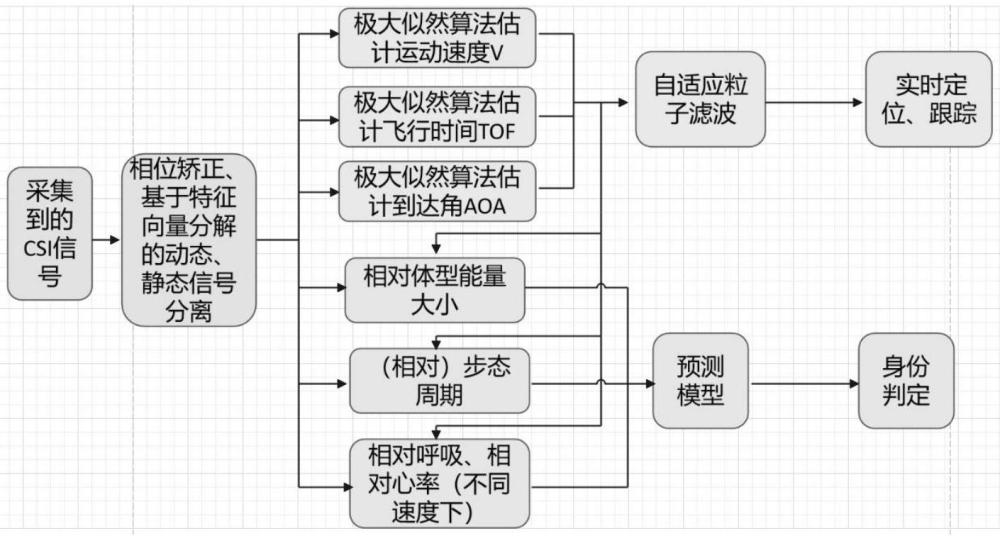
4、步骤s2、对得到的信道状态信息信号相位矫正;根据空间谱估计理论对相位矫正后的信道状态信息进行静态和动态信号分离;
5、步骤s3、得到的动态路径的信号,分别用极大似然估计算法求得运动目标的运动速度v、到达角aoa、飞行时间tof;再根据前一时刻速度对当前tof值进行加权,得到更精确的tof值;
6、步骤s4、将得到更精确的tof值与得到的到达角aoa值用粒子滤波实现定位,从动态信号中获得运动目标的呼吸率、心率检测,获得运动目标的相对体型能量,获得运动目标的相对步态周期,将获得的运动目标的呼吸率、心率检测、相对体型能量、相对步态周期代入提前训练好的模型,根据最大概率得到运动目标的身份。提前训练好的模型可使用公知的神经网络模型(包括但不限于cnn、rnn、lstm、自注意力机制等。
7、进一步的,所述步骤s1中的从接收装置的阵列天线中得到待检测的信道状态信息信号进一步为:接收到的无线信号wi-fi信号的信道状态信息csi体现了环境中静态和动态对象的信息,表示为:
8、
9、此处l表示环境中动态和静态路径的总数。hl(i,k)表示第l条路经的第k子载波的第i数据包的csi信号。n(i,k)表示环境中的噪声。al(i,k)表示第l条路径的幅度,τl表示第l条路径的飞行时间。f表示载波频率。
10、进一步的,所述步骤s2中的根据空间谱估计理论对相位矫正后的信道状态信息进行静态和动态信号分离进一步为:
11、根据空间谱估计理论,信号特征空间u可分为信号空间us和噪声空间un:
12、r=uσuh=usσsush+unσnunh,
13、又将信号空间us分为静态信号空间ul和动态信号空间ud:
14、r=udσdudh+ulσlulh+unσnunh;
15、根据特征向量空间分解可知,总的信号r空间的特征值σ由信号空间特征值σs和噪声空间特征值σn组成(其中σ包含特征值λ1、λ2……λm,σs包含特征值λ1、λ2……λn,σn包含特征值λn+1、λn+2……λm);
16、
17、hl(i,k)中包含的静态路径sl可表示为:
18、
19、因为静态路径间只相差复常数,所以静态路径之间是相干的,会合并为一条路径,信号协方差的特征值表示不同路径的信号的功率大小,所以对于信号空间的特征值的最大的为静态信号,剩余的n-1条为动态信号,λ静表示静态路径信号的特征值,λ动表示动态路径信号的特征值,即
20、
21、进一步的,所述步骤s3进一步为:到的动态路径的csi信号划分为多个短时窗口,在这个滑动窗口内平均速度v、到达角aoa、飞行时间tof看成常数,t=1,2,3,…,t表示滑动窗口的数目;分段后,以运动目标的速度vi,k,m近似满足如下条件:
22、vi,k,m=vt+ε。
23、其中表示窗口t的平均速度vt,ε为估计噪声,ε~n(0,σ1)服从均值为0,方差为σ1的正态分布;
24、通过(vi,k,m|vt)的公式得到短时间窗口内的第m根天线的第k个子载波的第i个数据包的速度vi,k,m;则其速度的概率密度函数可表示为:
25、
26、i表示数据包总个数,k表示每根天线包含的子载波总数,m为总天线数,所有速度观测值的联合概率分布函数为:
27、
28、相对于以收发设备为焦点的椭圆的径向速度的极大似然估计结果,即先对联合概率分布函数取对数,然后让速度观测值的联合概率分布函数最大:
29、
30、对让速度观测值的联合概率最大的分布函数in(p(v|vt))中vt求导,并令导数为0,即可得到径向速度的极大似然估计为:
31、
32、对于到达角aoa、飞行时间tof值txq-1也用同样的方法求得;
33、根据前一时刻速度对当前tof值txq-1进行加权,得到更精确的tof值txq:
34、
35、其中vmean表示前一时刻的平均速度,c表示光速,表示当前时刻与前一时刻的时间间隔。
36、进一步的,所述步骤s4中的获得的运动目标的呼吸率、心率检测进一步为:进行奇异点滤波后的信号用小波变换进行分解,选择haar小波,对分解后的参数进行阈值处理,选择合适的阈值进行分析,利用小波逆变换进行小波重构,得到运动信号包络w(t);
37、进行奇异点滤波后的信号减去的运动信号包络,得到呼吸和心率信号;
38、r(t)+h(t)=s(t)-w(t)
39、s(t)为行奇异点滤波后的信号,w(t)为运动信号包络,r(t)为呼吸信号,h(t)为心率信号;
40、获取的呼吸和心率信号进行巴特沃斯带通滤波,通带频率为0.15-0.5hz滤出呼吸信号,通带频率为0.8-2.5hz滤出心率信号;进行离散傅里叶变换,频谱中检测到的峰值点所对应的频率就是呼吸率和心率。
41、进一步的,所述步骤s4中的获得的运动目标的相对体型能量进一步为:
42、每个天线能够获得30个子载波,三根接收天线共收到90个子载波,计算90个子载波平均能量,其公式如下:
43、
44、s(t)为行奇异点滤波后的信号,s(jw)为s(t)信号的频谱,e为s(t)信号的能量;
45、因为距离对能量有较大的影响,为了更能精确体现运动目标的体型大小,根据定位到的位置计算目标与接收天线的距离d(t)对目标能量进行加权:
46、e(t)相对=e/d(t)
47、进一步的,所述步骤s4中的获得的运动目标的相对步态周期进一步为:
48、将得到运动信号包络w(t),进行离散傅里叶变换,频谱中检测到的峰值点所对应的频率就是步态周期b(t)。因为距离对步态周期有较大的影响,为了更能精确体现运动目标的体型大小,根据得到的位置计算目标与接收天线的距离的d(t)对目标步态周期进行加权:
49、b(t)相对=b(t)/d(t)。
50、进一步的,所述步骤s4中将得到更精确的tof值与得到的到达角aoa值用粒子滤波实现定位进一步为:根据经过目标反射后到达阵列天线的角度θ1,即可在检测区域范围内确定唯一的位置。若目标位置为(x,y),发送天线f1和接收天线f2的位置分别为(x1,y1)和(x2,y2),则可用如下方程求得目标坐标:
51、
52、本发明的有益效果:本发明可以通过一组发送和接收设备可实现精准实时定位且可识别被定为目标身份,可以准确从包含复杂噪声、多径的信号中准确分离出运动目标的各种信号。定位过程分别用极大似然估计算法求出运动目标的运动速度、相对于接收天线阵列的到达角、信号从发送设备经过运动目标反射到达接收设备的飞行时间。最后使用自适应粒子滤波实现实时定位。身份识别过程主要采集运动目标的呼吸、胳膊腿等运动的频率幅度等信息实现身份识别。该系统具有方便搭设,便于大规模推广的优点。
- 还没有人留言评论。精彩留言会获得点赞!