基于空泡及空泡效应采集和分析的设备集成方法及系统与流程
本技术涉及设备集成,尤其是一种基于空泡及空泡效应采集和分析的设备集成方法及系统。
背景技术:
1、现代舰船在功率和航速增加的同时,对舰船降低噪声提高隐蔽性和舒适性的要求更为严格,使得舰船设计过程中对减小螺旋桨空泡以及附体空泡体积、提高舰船空泡起始航速的要求进入了一个全新阶段。高航速引起的舰艇空泡噪声激增、临界航速偏低问题逐渐暴露,已经对编队的声呐探潜、自身隐蔽等作战能力产生显著影响。
2、舰船空泡的研究一般分为理论分析、数值计算、模型试验、实船试验几大部分。由于空泡本身性质非常复杂,目前的理论分析和数值计算虽然已经在设计优化阶段产生了相当大的作用,但最终尚需要通过模型试验进行设计优化验证和实船预报。然而,模型试验雷诺数在106量级而实船雷诺数在109量级,通常模型试验结果与实船的真实结果之间存在所谓的“尺度效应”,只能通过大量的实船数据和模型试验结果进行相关分析和研究,不断修正模型试验结果的预报方法,提高模型试验预报实船空泡性能的正确性。
3、在进行实船试验时,涉及的各设备之间相互独立,互不关联,并且,各设备各自对应一个或多个采集计算机进行所需数据的采集。由于不同采集计算机控制不同设备采集不同类型的数据,并且各设备之间不能实现同步,使得采集的数据对空泡效应分析造成了困境,造成了空泡效应分析耗时长、效率低和效果差的问题。
技术实现思路
1、本技术人针对上述问题及技术需求,提出了一种基于空泡及空泡效应采集和分析的设备集成方法及系统,用以解决现有技术在进行空泡效应分析时由于各设备的相互独立,出现的空泡效应分析耗时长、效率低和效果差的问题,实现设备集成,以提高空泡效应分析的效率和效果。
2、本技术实施例提供了一种基于空泡及空泡效应采集和分析的设备集成方法,应用于采集计算机,所述方法包括:
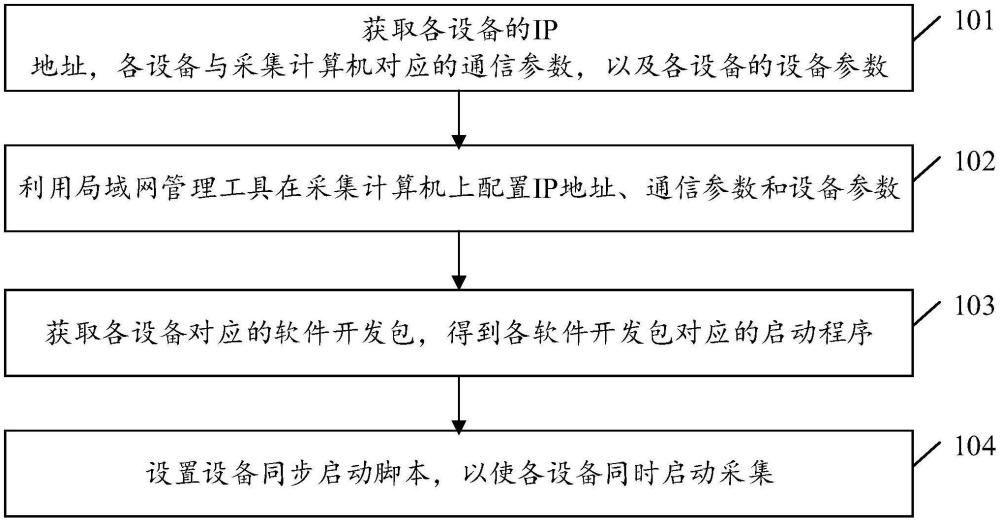
3、获取各设备的ip地址,各设备与所述采集计算机对应的通信参数,以及各设备的设备参数,其中,所述设备包括:用于采集船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号的高频数据采集器、用于拍摄螺旋桨的高速相机、用于拍摄支架和呆木附体的网络相机和用于拍摄球艏的水密相机;
4、利用局域网管理工具在所述采集计算机上配置所述ip地址、所述通信参数和所述设备参数;
5、获取各设备对应的软件开发包,得到各软件开发包对应的启动程序,其中,各所述启动程序分别用于指示所述高频数据采集器采集所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号,所述高速相机拍摄螺旋桨空泡图像,所述网络相机拍摄船体支架和呆木附体空泡图像,以及所述水密相机拍摄球艏空泡图像;
6、设置设备同步启动脚本,以使各设备同时启动采集,其中,所述同步启动脚本用于指示各软件开发包的启动程序同时触发。
7、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法,所述方法还包括:
8、设置图像上传脚本,并配置图像上传时长,其中,所述图像上传脚本用于指示所述高速相机以所述图像上传时长为时间间隔将拍摄得到空泡图像上传至所述采集计算机,并上传后清空本地内存中的所述空泡图像。
9、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法,所述方法还包括:
10、设置第一数据分析脚本;
11、其中,所述第一数据分析脚本包括:第一数据分析方法;
12、其中,所述第一数据分析脚本用于指示基于所述第一数据分析方法分析所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号得到实时频域数据;并分析所述实时频域数据和同步得到的所述螺旋桨空泡图像,得到第一分析结果;
13、其中,所述第一分析结果表示在所述船舶运行参数对应的工况下螺旋桨处的空泡面积变化信息和空泡体积变化信息。
14、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法,所述方法还包括:
15、设置第二数据分析脚本;
16、其中,所述第二数据分析脚本包括:第二数据分析方法;
17、其中,所述第二分析脚本用于指示基于所述第二数据分析方法分析同步得到的所述螺旋桨空泡图像、所述船体支架和呆木附体空泡图像和所述球艏空泡图像,得到第二分析结果;
18、其中,所述第二分析结果包括:所述船舶对应的空泡面积变化信息和空泡体积变化信息。
19、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法,所述方法还包括:
20、设置第三数据分析脚本;
21、其中,所述第三数据分析脚本包括:第三数据分析方法;
22、其中,所述第三数据分析脚本用于指示基于所述第三数据分析方法分析同步得到的所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号、所述船体支架和呆木附体空泡图像和所述球艏空泡图像,得到第三分析结果;
23、其中,所述第三分析结果包括:在所述船舶运行参数对应的工况下,船体和球艏的空泡面积变化信息和空泡体积变化信息。
24、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法,所述方法还包括:
25、设置第四数据分析脚本;
26、其中,所述第四数据分析脚本用于指示汇总所述第一分析结果、所述第二分析结果和所述第三分析结果,得到试验分析结果。
27、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法,利用局域网管理工具在所述采集计算机上配置所述设备参数,包括:
28、配置所述高频数据采集器的第一设备参数,其中,所述第一设备参数包括:通道名称、通道采样率和通道滤波,其中,一个通道包括多个传感器;
29、配置所述高速相机的第二设备参数,其中,所述第二设备参数包括:采样频率、采样间隔和图像像素。
30、本技术实施例还提供了一种基于空泡及空泡效应采集和分析的设备集成系统,所述系统包括:采集计算机、高频数据采集器、高速相机、网络相机和水密相机;
31、所述高频数据采集器、所述高速相机、所述网络相机和所述水密相机分别与所述采集计算机通信连接;
32、所述高频数据采集器,用于采集船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号,并将采集的所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号发送至所述采集计算机;
33、所述高速相机,用于拍摄螺旋桨,得到摄螺旋桨空泡图像,并将所述摄螺旋桨空泡图像发送至所述采集计算机;
34、所述网络相机,用于拍摄支架和呆木附体空泡,得到支架和呆木附体空泡图像,并将所述支架和呆木附体空泡发送至所述采集计算机;
35、所述水密相机,用于拍摄球艏,得到球艏空泡图像,并将所述球艏空泡图像发送至所述采集计算机;
36、所述采集计算机,用于获取并配置各设备的ip地址,各设备与所述采集计算机对应的通信参数,以及各设备的设备参数;获取各设备对应的软件开发包,得到各软件开发包对应的启动程序;设置设备同步启动脚本,以使各设备同时启动采集;
37、其中,各所述启动程序分别用于指示所述高频数据采集器采集所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号,所述高速相机拍摄螺旋桨空泡图像,所述网络相机拍摄船体支架和呆木附体空泡图像,以及所述水密相机拍摄球艏空泡图像;所述同步启动脚本用于指示各软件开发包的启动程序同时触发。
38、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成系统,所述采集计算机,还用于设置第一数据分析脚本,第二数据分析脚本、第三数据分析脚本和第四分析脚本;
39、其中,所述第一数据分析脚本包括:第一数据分析方法,所述第一数据分析脚本用于指示基于所述第一数据分析方法分析所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号得到实时频域数据;并分析所述实时数据和同步得到的所述螺旋桨空泡图像,得到第一分析结果;
40、其中,所述第二数据分析脚本包括:第二数据分析方法,所述第二分析脚本用于指示基于所述第二数据分析方法分析同步得到的所述螺旋桨空泡图像、所述船体支架和呆木附体空泡图像和所述球艏空泡图像,得到第二分析结果,其中,所述第二分析结果包括:空泡面积变化信息和空泡体积变化信息;
41、其中,所述第三数据分析脚本包括:第三数据分析方法,所述第三数据分析脚本用于指示基于所述第三数据分析方法分析同步得到的所述船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号、所述船体支架和呆木附体空泡图像和所述球艏空泡图像,得到第三分析结果;
42、其中,所述第四数据分析脚本用于指示汇总所述第一分析结果、所述第二分析结果和所述第三分析结果,得到试验分析结果。
43、根据本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成系统,所述高频数据采集器包括:振动传感器、水听器、放大器、转速采集器、扭矩采集器和相位采集器。
44、本技术实施例提供的基于空泡及空泡效应采集和分析的设备集成方法及系统,通过获取各设备的ip地址,各设备与采集计算机对应的通信参数,以及各设备的设备参数,其中,设备包括:用于采集船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号的高频数据采集器、用于拍摄螺旋桨的高速相机、用于拍摄船体的网络相机和用于拍摄球艏的水密相机;利用局域网管理工具在采集计算机上配置ip地址、通信参数和设备参数,以实现各设备与采集计算机的互联,由于各设备之间相互独立,需要多个采集计算机的问题;获取各设备对应的软件开发包,得到各软件开发包对应的启动程序,其中,各启动程序分别用于指示高频数据采集器采集船舶运行参数以及空泡产生的振动信号、噪声信号和脉动压力信号,高速相机拍摄螺旋桨空泡图像,网络相机拍摄船体支架和呆木附体空泡图像,以及水密相机拍摄球艏空泡图像;设置设备同步启动脚本,以使各设备同时启动采集,可见,本技术通过执行同步启动脚本控制各软件开发包的启动程序同时触发,以同时启动各设备,实现各设备数据采集的同步性,进而实现基于一台采集计算机利用各设备同步采集的数据进行空泡效应分析,解决了空泡效应分析耗时长、效率低的问题,实现了设备集成,提高了空泡效应分析的效率和效果。
- 还没有人留言评论。精彩留言会获得点赞!