基于自适应传输功率的水下无线传感器网络目标跟踪方法及装置
本发明涉及水下目标跟踪,具体为基于自适应传输功率的水下无线传感器网络目标跟踪方法及装置。
背景技术:
1、随着海洋科技的不断发展,水下传感器网络在海洋监测、生态研究、军事侦察及水下资源开发等领域发挥着越来越重要的作用。在这些应用中,目标跟踪是核心任务之一。然而,现有技术在解决水下目标跟踪时面临多种挑战,主要体现在信号传播的复杂性和定位精度的不足。
2、首先,水下环境具有高度的复杂性,包括海水的温度、盐度、密度、导电率等物理和化学特性,这些因素都直接影响声波信号的传播特性。声波在水中的传播速度会受到上述因素的影响,因此在进行目标定位时,无法准确获取目标的真实位置。此外,海洋环境中的流动、涡流及其他动态变化也会造成信号的衰减和失真,使得目标位置数据不稳定,进一步降低了系统的可靠性。
3、其次,现有技术通常未能充分考虑信号传递过程中的时间延迟。这种时间延迟主要来源于目标与接收节点之间的距离以及环境的变化,导致目标位置的实时性不足。在快速移动的目标或快速变化的环境中,传统的目标跟踪方法容易发生定位偏差,甚至造成追踪失败。在实际的应用场景中,尤其是对动态目标的追踪,信号延迟会导致系统反应滞后,从而影响决策的及时性和准确性。
4、再者,目前大多数水下跟踪系统在传感器节点的布局与传输功率的设计上缺乏适应性,不能根据环境变化或目标移动情况进行动态调整。这导致在一些复杂或恶劣的水下环境中,信号传输不稳定,造成数据的丢失和不一致。此外,传统方法通常采用固定的传输功率,并未充分利用环境信息进行自适应调节,导致能量的浪费和信号的传输效率低下。
5、因此,针对这些技术问题,提高水下目标跟踪系统的实时性、可靠性和准确性,成为当前研究的重点和难点。新的技术方法需要能够有效整合传感器数据,考虑环境因素,并根据实际情况动态调整系统参数,以确保在复杂的水下环境中实现高效的目标跟踪。
6、现有技术中的,公开号为cn110191422a公开了海洋水下传感器网络目标跟踪方法,通过在监测区域内,均匀安装水声传感器,建立多个簇;建立目标运动模型,激活目标所在小区域内的簇头和传感器节点,其余传感器节点和簇头保持休眠状态;应用粒子滤波算法跟踪定位水下目标;步判断目标是否驶离水下监测区域,如果是则结束跟踪过程;如果不是,继续判断目标是否将要离开所在的小区域,如果目标将要离开目标所在的小区域,则当前目标所在小区域内的簇头将最后采样时刻的目标状态估计值和方差估计值传递给下一时刻激活的簇头节点,如果目标不离开当前小区域,进入下一时刻 ,转至激活目标所在小区域内的簇头和传感器节点,其余传感器节点和簇头保持休眠状态步骤,但现有技术依旧存在缺陷,该现有技术没有考虑到信号传递的时间差以及复杂的海洋环境对获取的跟踪目标位置坐标产生的影响,信号传递的时间差可能导致跟踪目标位置定位的延迟或偏差,从而影响系统的准确性,复杂的海洋环境会导致信号衰减、反射和干扰,从而进一步降低数据的可靠性和准确性。
7、在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供基于自适应传输功率的水下无线传感器网络目标跟踪方法及装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、基于自适应传输功率的水下无线传感器网络目标跟踪方法,具体步骤包括:
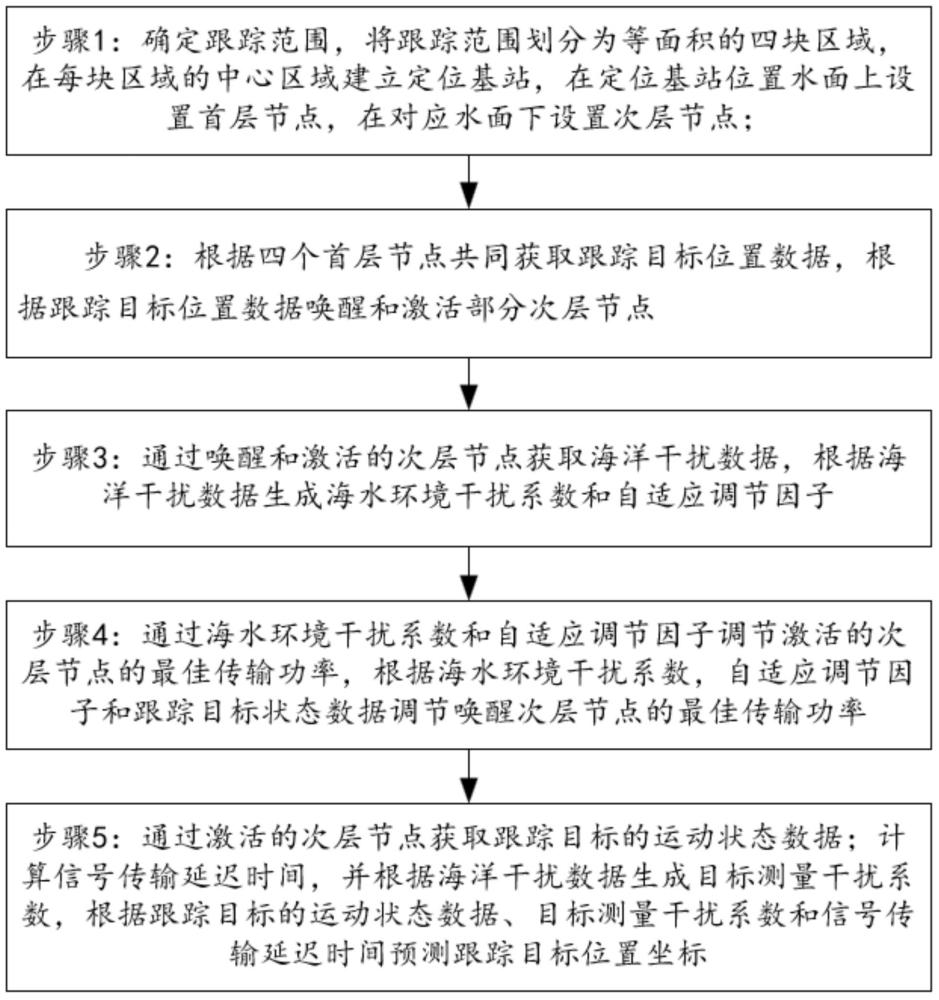
4、步骤1:确定跟踪范围,将跟踪范围划分为等面积的四块区域,在各区域的中心位置建立定位基站,在定位基站位置的水面上设置首层节点,并在水面下设置多个次层节点;
5、步骤2:根据四个首层节点共同获取跟踪目标位置数据,根据跟踪目标位置数据唤醒和激活部分次层节点;
6、步骤3:通过唤醒和激活的次层节点获取海洋干扰数据,根据海洋干扰数据生成海水环境干扰系数和自适应调节因子;
7、步骤4:通过海水环境干扰系数和自适应调节因子,计算唤醒的次层节点的最佳传输功率,根据海水环境干扰系数,自适应调节因子和跟踪目标位置数据,计算激活的次层节点的最佳传输功率;
8、步骤5:通过激活的次层节点获取跟踪目标的运动状态数据;计算信号传输延迟时间,并根据海洋干扰数据生成目标测量干扰系数,根据跟踪目标的运动状态数据、目标测量干扰系数和信号传输延迟时间预测跟踪目标位置坐标。
9、进一步地,所述首层节点由水声通信机和位置探测器构成;所述水声通信机用于发射、接收水声信号,所述位置探测器用于探测跟踪目标位置;
10、所述次层节点由水声通信机,电导率传感器、温度传感器、盐度传感器、水压传感器、海水流动的速度探测器和环境噪声信号强度探测器构成;所述水声通信机用于发射、接收水声信号,所述电导率传感器、温度传感器、盐度传感器、水压传感器、海水流动的速度探测器和环境噪声信号强度探测器分别用于获取海水的电导率、温度、盐度、水压、海水流动的速度和环境噪声信号强度;
11、设置次层节点所依据的具体逻辑为:获取次层节点的通信半径,将通信半径确作为次层节点间的布设距离,在首层节点正下方设置多个由上至下依次分布,且间隔为布设距离的次层节点,且最上方的次层节点与首层节点的间距为布设距离,且最下方的次层节点与水底的间距不大于布设距离,并分别以各个次层节点为圆心,在水平面上以同心圆的形式布置多圈环向分布的次层节点,且相邻内外圈的半径绝对差值为布设距离,且任一外圈的次层节点均至少与相邻内圈的一个次层节点通信连接,设置布设距离所依据的具体公式为:
12、;
13、其中,为布设距离,为通信半径。
14、进一步地,唤醒和激活次层节点的逻辑为:以跟踪目标位置数据为圆心,布设距离为半径生成球形区域,激活球形区域内的次层节点,并以跟踪目标位置和距其最近的首层节点间连线为轴线,布设距离为半径生成圆柱区域,唤醒圆柱区域内不包括已激活次层节点的次层节点;
15、激活的次层节点用来采集跟踪目标的运动状态数据和该次层节点处的海洋干扰数据,唤醒的次层节点用来采集该次层节点处的海洋干扰数据;所述运动状态数据包括跟踪目标位置的坐标、速度、加速度;所述海洋干扰数据包括海水的电导率、温度、盐度、水压、海水流动的速度、环境噪声信号强度和次层节点传输信号的相位。
16、进一步地,生成海水环境干扰系数和自适应调节因子所依据的具体逻辑为: 获取海洋干扰数据,将海水的电导率、盐度、水压生成海水环境干扰系数,根据环境噪声信号强度和次层节点传输信号的相位生成自适应调节因子;
17、生成海水环境干扰系数所依据的具体公式为:
18、;
19、其中,为海水环境干扰系数,为海水水压,为海水盐度,为海水导电率;
20、生成自适应调节因子所依据的具体公式为:
21、;
22、其中,为自适应功率调节因子,为激活和唤醒的次层节点总数,为激活和唤醒的次层节点中第个次层节点的环境噪声强度,为激活和唤醒的次层节点第个次层节点传输信号的相位,为无多途效应时的理论相位,为激活和唤醒的全部次层节点中次层节点的索引。
23、进一步地,通过海水环境干扰系数和自适应调节因子,计算唤醒的次层节点的最佳传输功率,根据海水环境干扰系数,自适应调节因子和跟踪目标位置数据,计算激活的次层节点的最佳传输功率;
24、计算唤醒的次层节点的最佳传输功率所依据的具体公式为:
25、;
26、其中,为第个唤醒的次层节点的最佳传输功率,为第个唤醒的次层节点的海水环境干扰系数,为自适应功率调节因子,为唤醒的次层节点的初始传输功率,为唤醒的次层节点索引。
27、计算激活的次层节点的最佳传输功率所依据的具体公式为:
28、;
29、其中,为第个激活的次层节点的最佳传输功率,为激活的次层节点的初始传输功率,为第个激活的次层节点的海水环境干扰系数,为测量的跟踪目标位置坐标,为第个激活的次层节点坐标,为激活的次层节点索引。
30、进一步地,根据海洋干扰数据生成目标测量干扰系数,具体公式如下:
31、;
32、;
33、;
34、其中,为沿着轴方向的目标测量干扰系数,为沿着轴方向的目标测量干扰系数,为沿着轴方向的目标测量干扰系数,为海水流速与轴方向的夹角,为海水流速与轴方向的夹角,为海水流速与轴方向的夹角,为海水流速沿着轴方向速度,为海水流速沿着轴方向速度,为海水流速沿着轴方向速度,为海水水压,为海水温度,为激活的次层节点数,为唤醒的次层节点数;
35、根据跟踪目标位置数据、与跟踪目标位置最近的首层节点位置数据、信号在海水中的传输速度,计算信号传输延迟时间;
36、计算信号传输延迟时间所依据的具体公式为:
37、;
38、其中,为信号传输延迟时间,为测量的跟踪目标位置坐标,为与跟踪目标位置最近的首层节点坐标,为信号在海水中的传输速度;根据跟踪目标的运动状态数据、海水运动干扰系数和信号传输延迟时间预测跟踪目标位置坐标;
39、预测跟踪目标位置坐标所依据的具体公式为:
40、;
41、其中,为预测的跟踪目标位置坐标,为跟踪目标位置坐标,为信号传输延迟时间,,,分别为所有激活的次层节点采集的跟踪目标沿轴方向的平均速度,,,分别为所有激活的次层节点采集的跟踪目标沿轴方向的平均加速度。
42、本发明另外提供一种基于自适应传输功率的水下无线传感器网络目标跟踪装置,所述装置用于实现所述的基于自适应传输功率的水下无线传感器网络目标跟踪方法,具体包括:
43、设施准备模块,用于确定跟踪范围,将跟踪范围划分为等面积的四块区域,在各区域的中心位置建立定位基站,在定位基站位置的水面上设置首层节点,并在水面下设置多个次层节点;
44、唤醒激活模块,用于根据四个首层节点共同获取跟踪目标位置数据,根据跟踪目标位置数据唤醒和激活部分次层节点;
45、数据分析模块,用于通过唤醒和激活的次层节点获取海洋干扰数据,根据海洋干扰数据生成海水环境干扰系数和自适应调节因子;
46、功率优化模块,用于通过激活的次层节点获取跟踪目标的运动状态数据;计算信号传输延迟时间,并根据海洋干扰数据生成目标测量干扰系数,根据跟踪目标的运动状态数据、目标测量干扰系数和信号传输延迟时间预测跟踪目标位置坐标。
47、与现有技术相比,本发明的有益效果是:
48、本发明考虑到信号传递的时间差可能导致跟踪目标位置定位的延迟,并对通过时间延迟对获得的跟踪目标位置数据进行校准,使获取的跟踪目标位置信息更加准确。
49、本发明还考虑到复杂的海洋环境对信号传递造成的影响,并通过生成海水环境干扰系数来量化这种影响,并通过海水环境干扰系数寻找节点最佳传输功率通过最佳传输功率,最后通过最佳传输功率完成跟踪目标的双重校准。
- 还没有人留言评论。精彩留言会获得点赞!