量测设备的图像采集系统和方法与流程
本技术涉及半导体,尤其涉及一种量测设备的图像采集系统和方法。
背景技术:
1、半导体检测技术在半导体生产、封装和测试等流程中发挥着重要的作用,其中,对准误差(overlay,ovl)的量测是半导体生产过程中关键工艺的重要环节。对准误差是关键工艺中需要控制的最重要误差之一,它指的是晶圆对准过程中前层和当层之间的图案对准误差,在晶圆上和曝光场上存在一定的分布规律。为了保证对准误差在阈值范围内,每一个批次的晶圆曝光完毕后需要在对准量测机台上进行很多标记点的对准误差量测,量测值经过数学处理后得到对准误差的分布模型(ovl model terms),该分布模型用于下一个批次晶圆曝光的对准误差控制。为了得到对准误差在晶圆和曝光场上存在分布规律,对准误差量测的标记点需要尽量均匀的分布在整片晶圆上,对准误差的量测过程中主要是通过相机获得同时包含前层和当层的信息的晶圆量测图像(即包含对准误差量测标记点的晶圆扫描图像),通过晶圆量测图像来获得对准误差。因此,为了提高对准误差的量测精度,晶圆量测图像采集的定位精度也具有极高的要求,需要高精度的晶圆图像扫描的定位技术和自动对焦技术。
2、现有技术中,在提高晶圆图像扫描的定位精度的过程中,在对准误差量测的标记点定位时需要进行标记捕获(target acquisition,ta)(包括晶圆量测图像的采集)的操作,同时,为了提高晶圆图像扫描的精度,在进行ta操作的前后均利用白光干涉对焦法来执行一次对焦。白光干涉对焦是一种精度极高(约等于10nm)的对焦技术,但它每一次执行对焦均需要大负载大行程的z向电机(即精度电机)执行约20um行程的扫描运动,等待解算结果之后还需要执行一次z向电机的步进整定,这导致白光干涉对焦的每一次流程均需要消耗70ms~80ms的时间,两次白光干涉对焦也使得晶圆量测图像的采集耗时长,晶圆的对准误差量测效率低。
技术实现思路
1、本技术提供了一种量测设备的图像采集系统和方法,可减少目标物的图像采集时长,提高目标物基于图像采集实现的对准误差量测效率,适用性强。
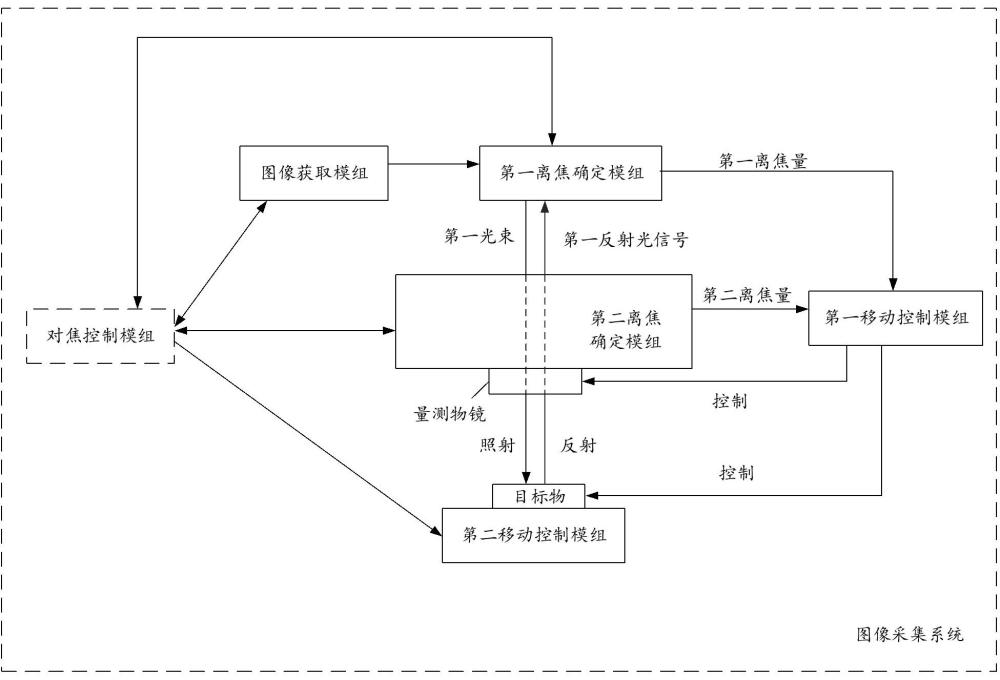
2、第一方面,本技术提供一种量测设备的图像采集系统,第一离焦确定模组,用于确定目标物的第一离焦量;第二离焦确定模组,用于确定上述目标物的第二离焦量;第一移动控制模组,用于根据上述第一离焦量控制上述目标物的量测物镜与上述目标物在第一方向上发生相对移动,以对上述目标物进行第一次对焦,以及根据上述第二离焦量控制上述量测物镜与上述目标物在第一方向上发生相对移动,以对上述目标物进行第二次对焦;图像获取模组,用于对第一次对焦后的上述目标物进行图像采集,生成第一图像,上述第一图像用于确定上述目标物是否处于预设位置;以及用于在确定上述目标物处于上述预设位置后,对第二次对焦后的上述目标物进行图像采集,生成第二图像;其中,上述第一离焦量的确定速度大于上述第二离焦量的确定速度,上述第一图像的分辨率小于上述第二图像的分辨率。采用本技术提供的图像采集系统,可通过第一离焦确定模组以较高的速度获取目标物的第一离焦量,使图像采集系统能迅速对目标物进行第一次对焦,在第一次对焦的基础上,第二离焦确定模组以更高的精度获取目标物的第二离焦量,使图像获取模组在第二次对焦后采集到的第二图像为更高清晰度的图像,因此,可减少目标物的图像采集时长,提高目标物的对准误差量测效率,且图像采集系统中各模组结构简单,适用性强。
3、在第一方面的一种可能的实施方式中,上述第一离焦确定模组包括第一光发射单元和第一光接收单元,在上述确定目标物的第一离焦量的过程中,上述第一光发射单元用于发射第一光束,上述第一光束经上述目标物反射后生成第一反射光信号,上述第一光接收单元用于根据接收到的上述第一反射光信号,确定上述目标物的第一离焦量。采用本技术,通过第一光发射单元发射第一光束并由目标物反射后由第一光接收单元接收,图像采集系统能够迅速获取目标物的第一反射光信号,基于第一反射光信号,第一光接收单元能够快速且准确地计算出目标物的第一离焦量,这种直接的光学测量方法可提高第一离焦量确定的速度,可进一步减少目标物的图像采集时长,提高目标物的对准误差量测效率。
4、在第一方面的一种可能的实施方式中,上述第一离焦确定模组采用偏心掩膜、差分共焦、斩波法、共轴激光三角法中的其中一种确定上述第一离焦量。采用本技术,可利用特定的光学效应或原理,对目标物的第一离焦量进行精确测量。上述方法具有高测量精度和高稳定性,可有效减少因外界干扰或系统误差导致的测量偏差,从而提高第一离焦量的确定精度。
5、在第一方面的一种可能的实施方式中,上述第二离焦确定模组包括第二光发射单元、干涉单元和第二光接收单元,上述干涉单元和上述量测物镜固定连接,上述干涉单元包括第一分光镜和参考反射镜;上述第二光发射单元用于发射第二光束,上述第二光束经过上述第一分光镜后生成第三光束和第四光束,上述第三光束经上述参考反射镜反射后生成第二反射光信号,上述第四光束经上述目标物反射后生成第三反射光信号;上述第一移动控制模组还用于在上述干涉单元在上述确定上述目标物的第二离焦量的过程中,控制上述干涉单元与量测物镜移动预设距离;在控制上述干涉单元与上述量测物镜从第一位置初始位置移动至第二位置第一位置的过程中,上述第二光信号接收单元用于接收上述干涉单元和上述量测物镜处于不同位置处时的上述第二反射光信号和上述第三反射光信号,并根据上述第二反射光信号和上述第三反射光信号,确定上述第二离焦量。采用本技术,由于干涉现象对光波的相位差极为敏感,本技术实施方式采用光学干涉原理,通过测量干涉条纹的变化来精确计算第二离焦量,可以实现对目标物的第二离焦量的高精度测量,能够进一步地提高第二次对焦的精度。
6、在第一方面的一种可能的实施方式中,上述第二光信号接收单元用于根据上述干涉单元和上述量测物镜处于不同位置处时接收到的上述第二反射光信号和上述第三反射光信号,确定上述图像获取模组处于对焦状态时上述干涉单元或上述量测物镜处于的第二位置,根据上述第二位置与上述干涉单元或上述量测物镜的初始位置,确定上述第二离焦量。采用本技术,可利用干涉原理和光信号分析,通过精确测量干涉单元或量测物镜的位置变化,实现对目标物的第二离焦量的高精度确定,因此可进一步提高第二次对焦的精度。
7、在第一方面的一种可能的实施方式中,上述第一移动控制模组包括第一控制单元和第一驱动单元,第一驱动单元均与上述第二光发射单元和上述干涉单元连接,上述第一控制单元用于控制上述第一驱动单元带动上述第二光发射单元和上述干涉单元在上述第一方向移动。采用本技术,通过第一控制单元和第一驱动单元的引入,使图像采集系统能够精确控制干涉单元在第一方向上的移动。这种精确控制确保了干涉单元能按照预定的轨迹和速度进行移动,从而可进一步提高第二离焦量确定的准确性和稳定性。
8、在第一方面的一种可能的实施方式中,上述图像采集系统包括第二分光镜,上述目标物、上述量测物镜、上述第一分光镜、上述第二分光镜以及上述图像获取模组位于第一光轴上,上述第二光发射单元、上述第一分光镜以及上述参考反射镜位于第二光轴上,其中,上述第一光轴与上述第二光轴垂直。采用本技术,通过采用第二分光镜并将相关组件合理布局于第一光轴和第二光轴上,图像采集系统实现了光路的精确分离与合并,提高了图像采集的准确性和效率。
9、在第一方面的一种可能的实施方式中,上述图像采集系统包括第三分光镜,上述第二分光镜、上述第三分光镜与上述第二光接收单元位于第三光轴上,上述第三分光镜与上述第一离焦确定模组位于第四光轴上,其中,上述第三光轴与上述第二光轴平行,上述第四光轴与上述第一光轴平行。采用本技术,由于第三分光镜的引入和第三光轴、第二光轴的平行布局,图像采集系统能够更有效地分离和合并不同方向的光线,避免了光路的相互干扰,不仅提高了图像采集的清晰度,还增强了图像采集系统的稳定性和可靠性。
10、在第一方面的一种可能的实施方式中,上述第一移动控制模组与上述目标物连接,在上述目标物未处于上述预设位置时,上述第一移动控制模组用于控制上述目标物朝第二方向移动,以使上述目标物处于上述预设位置,其中,上述第二方向为与上述第一方向垂直的平面。采用本技术,通过第一移动控制模组与目标物的连接,图像采集系统可检测目标物的当前位置并判断目标物是否处于预设位置。若目标物未处于预设位置,第一移动控制模组可控制目标物朝第二方向移动,直至目标物达到预设位置,提高了图像采集系统的自动化程度,可进一步提高目标物的图像采集效率。
11、在第一方面的一种可能的实施方式中,上述图像采集系统还包括第二移动控制模组,上述第二移动控制模组与上述目标物连接;在上述目标物未处于上述预设位置时,上述第二移动控制模组用于控制上述目标物朝第二方向移动,以使上述目标物处于上述预设位置。采用本技术,通过引入第二移动控制模组,可使图像采集系统拥有第一移动控制模块和第二移动控制模组这两个独立的控制模块来确保目标物能够准确移动到预设位置。这种双重保障机制提高了目标物定位的准确性和可靠性,即使在一个控制模块出现故障或误差时,另一个模块也能确保目标物的正确定位。
12、在第一方面的一种可能的实施方式中,上述第二移动控制模组包括第二控制单元和第二驱动单元,上述第二控制单元与上述第二驱动单元连接,上述第二驱动单元与上述目标物连接,上述第二控制单元用于控制上述第二驱动单元带动上述目标物在第二方向移动,其中,上述第二方向为与上述第一方向垂直的平面。采用本技术,第二控制单元能够发送精确的指令,而第二驱动单元则能准确地将这些指令转化为目标物的实际移动,从而确保目标物能够精准地移动到预设位置,实现了对目标物在第二方向上移动的精确控制。
13、在第一方面的一种可能的实施方式中,上述图像获取模组还包括位置判断模块,上述位置判断模块用于根据上述第一图像确定上述目标物是否处于上述预设位置。采用本技术,通过对第一图像进行精确分析,位置判断模块能够识别出目标物的当前位置并与预设位置进行比较,从而确保目标物被准确地定位,提高了目标物图像采集精度。
14、在第一方面的一种可能的实施方式中,上述目标物上设有图形标记,上述预设位置为上述图形标记处于上述图像获取模组的视场中心时上述目标物在第二方向上的位置,其中,上述第二方向为与上述第一方向垂直的平面。采用本技术,通过在目标物上设置图形标记,并确保该标记处于图像获取模组视场中心的位置,可以提高目标物的定位精度和对第一图像的识别效率。
15、第二方面,本技术还提供一种量测设备的图像采集方法,包括:确定目标物的第一离焦量;基于上述第一离焦量,控制上述目标物的量测物镜与上述目标物之间在第一方向上发生相对移动,以对上述目标物进行第一次对焦;对第一次对焦后的上述目标物进行图像采集,生成第一图像,并利用上述第一图像确定上述目标物是否处于预设位置;在确定上述目标物处于预设位置后,获取上述目标物的第二离焦量;基于上述第二离焦量,控制上述量测物镜与上述目标物之间在第一方向上发生相对移动,以对上述目标物进行第二次对焦;对第二次对焦后的上述目标物进行图像采集,生成第二图像;其中,上述第一离焦量的确定速度大于上述第二离焦量的确定速度,上述第一图像的分辨率小于上述第二图像的分辨率。采用本技术,先对目标物进行快速对焦,再进行精细对焦以进行图像采集。第一阶段的快速对焦减少了目标物图像采集时需要的对焦时间,而第二阶段的精细对焦则保证了第二图像的高分辨率,从而保证基于第二图像进行误差量测的量测精度,因此可减少目标物的图像采集时长,提高目标物基于图像采集实现的对准误差量测效率。
16、在第二方面的一种可能的实施方式中,上述量测设备中包括第一离焦确定模组,上述第一离焦确定模组包括第一光发射单元、第一光接收单元,上述确定目标物的第一离焦量的方法,包括:控制第一光发射单元发射第一光束,上述第一光束经上述目标物反射后生成第一反射光信号;基于上述第一光接收单元接收到的上述第一反射光信号,确定上述目标物的第一离焦量。采用本技术,通过第一光发射单元发射光束,第一光接收单元接收第一反射光信号,并根据第一反射光信号计算第一离焦量,这一过程无需移动量测设备中的器件即可实现快速且高效地确定第一离焦量,可缩短整体的误差测量时长。
17、在第二方面的一种可能的实施方式中,上述基于上述第一光接收单元接收到的上述第一反射光信号,确定上述目标物的第一离焦量的方法,包括:根据上述第一反射光信号,采用偏心掩膜、差分共焦、斩波法、共轴激光三角法中的其中一种方式确定上述第一离焦量。采用本技术,通过采用偏心掩膜、差分共焦、斩波法、共轴激光三角法等测量方法,能够准确、快速地根据第一反射光信号确定目标物的第一离焦量,减少了测量误差,提高了第一离焦量的精度。
18、在第二方面的一种可能的实施方式中,上述量测设备中包括第二离焦确定模组,上述第二离焦确定模组包括第二光发射单元、干涉单元和第二光接收单元,上述干涉单元包括第一分光镜和参考反射镜,上述获取上述目标物的第二离焦量,包括:在控制上述干涉单元和上述量测物镜相对上述目标物在第一方向上发生相对移动的过程中,控制上述第二光发射单元发射第二光束,上述第二光束经过上述第一分光镜后生成第三光束和第四光束,上述第三光束经上述参考反射镜反射后生成第二反射光信号,上述第四光束经上述目标物反射后生成第三反射光信号;基于上述第二光接收单元接收到的上述第二反射光信号和上述第三反射光信号,确定上述目标物的第二离焦量。采用本技术,通过光学干涉原理,实现了对目标物第二离焦量的高精度测量,可进一步提高第二次对焦的对焦精度。
19、在第二方面的一种可能的实施方式中,上述基于上述第二光接收单元接收到的上述第二反射光信号和上述第三反射光信号,确定上述目标物的第二离焦量的方法,包括:基于上述第二光接收单元接收到的上述第二反射光信号和上述第三反射光信号,确定上述图像获取模组处于对焦状态时上述干涉单元或上述量测物镜处于的合焦第一位置;根据上述合焦第一位置与上述干涉单元或上述量测物镜的初始位置,确定上述第二离焦量。采用本技术,利用干涉原理和光信号分析,通过精确测量干涉单元或量测物镜的位置变化,实现对目标物第二离焦量的高精度确定。
20、在第二方面的一种可能的实施方式中,在上述控制上述量测物镜与上述目标物之间在第一方向上发生相对移动之前,包括:基于上述第一离焦量,确定量测物镜或上述目标物的目标移动位置。采用本技术,可确定目标移动位置以避免在没有预先确定目标移动位置的情况下,量测物镜或目标物过度移动或移动不足导致的第二次对焦不准确,而确定了目标移动位置后,图像采集系统可直接将量测物镜或目标物移动到该位置,无需进行多次试探性的移动和调整,大大减少了移动次数和时间,进一步提高了目标物的误差测量效率。
21、在第二方面的一种可能的实施方式中,上述控制上述目标物的量测物镜与上述目标物之间在第一方向上发生相对移动的方法,包括:控制上述量测物镜在第一方向上相对上述目标物移动,或/和控制上述目标物在第一方向上相对上述量测物镜移动。采用本技术,允许量测物镜和/或目标物在第一方向上移动,可根据具体的测量场景和需求,选择最合适的移动方式来实现第一次对焦和第二次对焦,适用性强。
22、在第二方面的一种可能的实施方式中,上述在确定上述目标物未处于预设位置后,包括:控制上述目标物在第二方向上和上述量测物镜发生相对移动,以使上述目标物处于预设位置。采用本技术,通过控制目标物在第二方向上移动,消除由于目标物不在预设位置时直接进行第二次对焦和图像采集时导致的测量误差,可进一步提高目标物的误差测量的精度和可靠性。
23、在第二方面的一种可能的实施方式中,上述量测设备中包括图像获取模组,在上述对第一次对焦后的上述目标物进行图像采集之前或在上述对第二次对焦后的上述目标物进行图像采集之前,包括:向上述图像获取模组发送对焦完毕的控制信号。采用本技术,通过发送对焦完毕的控制信号,能够确保图像获取模组在第一次对焦或第二次对焦完成后才进行图像采集,从而避免了因对焦未完成而导致的图像模糊或失真问题,提高了图像采集的准确性和质量。
24、在第二方面的一种可能的实施方式中,上述目标物上具有图形标记,上述确定上述目标物是否处于预设位置,包括:确定上述图形标记是否处于位于上述图像获取模组的视场中心;若上述图形标记处于位于上述图像获取模组的视场中心,确定上述目标物处于上述预设位置。采用本技术,图形标记的引入为目标物的位置判断提供了直观的视觉依据,能够更准确地确定目标物的当前位置,减少了目标物的定位误差,提高了目标物的定位准确性。
- 还没有人留言评论。精彩留言会获得点赞!