机器枪炮的制作方法
1.一种机器枪炮,属国防机电领域。
背景技术:
2.现有的枪和炮,基本上是人工操作,因而在射击运动物体时,人的反应度,和射击的精准度都很差,也因此浪费大量的子弹。
技术实现要素:
3.在这里发明一种机器枪炮,它能自动跟踪搜索运动物体,并锁定对准运动物体后,自动射击和自动发出炮弹。具有高效的杀伤力。
4.该发明是这样的,一个长方形的底板上,其中心有一个长方形的凹槽,凹槽上有一个上宽下窄的立体三角形;立体三角形的窄的一端的两边各有一个轮子在长方形底板的长方形凹槽内;立体三角形的中部两边有支撑板;支撑板一端固定在立体三角形的中部,另一端触及长方形底板;立体三角形的上宽的一面的左右两边各安装有一个无线信号输出系统,无线信号输出系统是发射电磁波、红外线和激光等无线并且返回吸收并输出信号的一个系统;两个无线信号输出系统中间下凹,下凹里架有一电动枪(35),与两个无线信号输出系统平行;电动枪的第四电机(28)安装在第一无线信号输出系统的盒子上,电机的轴与“z”字形杆的一端连接,“z”字形杆的另一端正好落在电动枪的
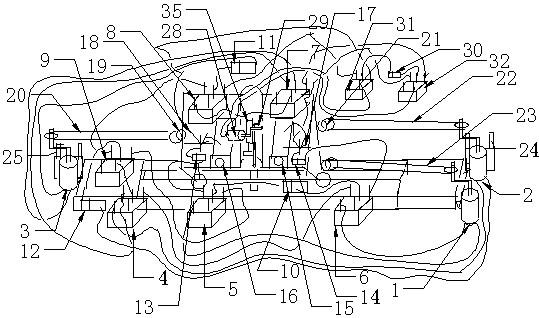
ꢀ“┗”
字形撞针(29)上;第二继电器(6)、第一继电器(5)、第五继电器(4)安装于长方形底板的前面,第四继电器(9)安装于长方形底板左侧的面板上,第六继电器(7)、第三继电器(8)安装于立体三角形上宽的一面上,在两个无线信号输出系统的后面;两个无线信号输出系统旁安装有第一三极管(18)、第二三极管(17),和第二电池(13)、第四电池(14);第一电池(10)安装于底板的长方形凹槽的边上;第三电池(12)安装于长方形底板的左边前侧面上;第五电池(11)、第六电池(30)、第七继电器(31)和第八继电器(32)可装于能安装的地方;第一电机(1)和第二电机(2)安装于长方形底板的右侧,第二电机的左右两边各安装一根第一限制杆(24),限制电机只能转动半圆;第三电机(3)安装于长方形底板的左侧,第三电机的左右两边各装一根第二限制杆(25),限制电机只能转动半圆;每个电机的转动轴上安装有倒反“z
”’
字形的倒反杆;倒反杆一端连接第一电机的转动轴,倒反杆的另一端被拉杆的一端的孔套着;拉杆的另端的孔套着立体三角形拉环;其中,第七继电器、第三继电器、第四继电器和第一继电器串连;第八继电器、第六继电器、第五继电器和第二继电器串连;其中,第一电池的电流经第一继电器的公共端和常闭端,经第一电机,经第二继电器的常闭端和公共端回到第一电池的负极;其中,第三电池的正极电流经第四继电器的公共端和常开端,经第五继电器的公共端和常闭端,经第二电机后回到第三电池的负极;其中,第五电池的正极电流,经第三继电器的公共端和常闭端,经第第六继电器的常开端和公共端,经第三电机后回到第五电池的负极;其中,第六电池的正极电流经第七继电器的公共端和常开端、经第四电机,经第八继电器的常开端和公共端回到第六电池的负极;电机在两个无线信号输出系统没有信号输入
时,第一继电器和第二继电器不工作,第一电池的电流经过第一继电器的公共端和常闭端,再经过第一电机,再经过第二继电器的常闭端和公共端回到电池的负极;从而使第一电机转动;第一电机的转动轴上的第一倒反杆;推动第一拉杆(23)和其一端的孔套着立体三角形右前上的第一拉环;第一电机带动第一倒反杆作圆运动,从而带动立体三角形底板上的长方形的凹槽内作来回运动。使得两个无线信号输出系统向左右扫描;当左边的电磁波等扫描到运动物体,就有第一无线信号(16)输出,第二无线信号输出系统(15)无信号输出,就有信号从左边的第一无线信号输出系统(16)输出,经过第一三极管基极,使得第二电池的正极电流经过第一三极管的集电极和发射极,再经第七继电器的右边的继电脚和左边的继电脚,经过第三继电器的右边继电脚和左边的继电脚,再经过第四继电器的左边的继电脚和右边的继电脚,再经过第一继电器的右边的继电脚和左边的继电脚,回到第二电池的负极;这时,第一继电器工作,第一继电器的公共端与常闭端断开,使得第一电机停止转动,来回扫描停止;此时,第二无线信号输出系统(15)没有扫描到运动物体,没有信号输出;第四继电器开始工作,第四继电器的公共端和常开端接通电路,第五继电器没有工作,第五继电器的公共端和常闭是通路,就有第三电池(12)的正极电流经过第四继电器的公共端和常开端,再经过第五继电器的公共端和常闭端,再经过第二电机后回到第二电池的负极;这样,第二电机启动,第二电机的转动轴的第二倒反杆推动第二拉杆(22)上套着立体三角形左后侧边固定的第二拉环(21),再推动立体三角形向左运动扫描(向左扫描,是想让第二无线信号输出系统获得信号输入,两个无线信号输出系统都有信号输入就能够确定跟踪运动物体);直到第二无线信号输出系统有信号输出;当右边的第二无线信号输出系统获得信号并输出,左边的第一无线信号输出系统无信号输出,就有第二无线信号输出系统输出信号,到第二三极的基极,就有第四电池的正极电流经过第二三极管的集电极和发射极,再经第八继电器的右边的继电脚和左边的继电脚,再经过第六继电器的右边继电脚和左边继电脚,再经过第五继电器的左边继电脚和右边继电脚,再经过第二继电器的左边继电脚和右边继电脚,再回到第四电池的负极;此时,控制第三电机的第六继电器工作,第六继电器的公共端和常开端导通;第三继电器因没工作,第三继电器的公共端与常闭端导通;就有第五电池的正极电流经第三继电器的公共端和常闭端,再经过第六继电器的常开端和公共端,再经第三电机后回到第五电池的负极;这第三电机转动,带动第三拉杆(20),第三拉环(19)和立体三角形向右运动;向右运动使第一无线信号输出系统获得信号;当第一无线信号输出系统和第二无线信号输出系统都有信号输出时,第一、二、三、四、五、六、七、八继电器都处于工作状态,控制第一电机的第一和第二继电器公共端与常闭端断开,第一电机无电流而停止运动;控制第二电机的第五继电器的公共端与常闭端断开而不通电,第二电机停止运动;控制第三电机的第三继电器的公共端与常闭端断开,第三电机不通电而停止运动;此时两无线信号输出系统跟踪到并正对锁定运动物体(无论运动向左运动或向右运动,在两无线信号输出系统的作用下,都能向左或向右跟踪锁定运动物体);同时,第七继电器处于工作状态,第七继电器的公共端和常开端导通,第八继电器也处于工作状态,第八继电器的公共端和常开端导通;所以第六电池的正极电流经第七继电器的公共端和常开端,经第四电机,经第八继电器的常开端和公共端回到第四电池的负极;第四电机导通后转动,带动“z”字形杆转动,“z”字形杆的另一端带动电动枪的
ꢀ“┗”
字形撞针(29)运动;“z”字形杆后刮动
“┗”
字形撞针,使
“┗”
字形撞针后拉;因“z”字形杆在第四电机的作用下,作圆周运动,
“
z”字形杆后拉后,随即向上转,此时的“z”字形杆脱离了
“┗”
字形撞针,使得
“┗”
字形撞针在电动枪里的弹簧的张力下,向前撞击后回到原位;如此周而复始地工作,电动枪的子弹射出,击中被锁定的运动物体。本技术用于机器枪时,无线可选用热像红外线。本专利以机器枪来说明机器枪炮。当用于机器炮时,如高射炮,可用小功率电机控制大功率电机的电路,以大功率电机来启动炮体。本专利机器眼在机械运动的作用下作横扫描,根据实际的要求,也可以把机械运动设计来纵扫描,圆周运动扫描和斜扫描,再装上机器眼即可。机器眼的扫描是靠机械运动来实施的。
5.由于采用上述设计,使得机器枪炮能够寻物、跟踪和锁定运动物体并射击。并且,可将机器枪炮安装在坦克或飞机或导弹等运动物体上。
附图说明
6.图1是机器枪炮全图;图2是电动枪图。
具体实施方式
7.在图1中,一个长方形的底板上,其中心有一个长方形的凹槽,凹槽上有一个上宽下窄的立体三角形;立体三角形的窄的一端的两边各有一个轮子在长方形底板的长方形凹槽内;立体三角形的中部两边有支撑板;支撑板一端固定在立体三角形的中部,另一端触及长方形底板;立体三角形的上宽的一面的左面装有第一无线信号输出系统(16),右边安装有第二无线信号输出系统(15);两个无线信号输出系统中间下凹,下凹里架有一电动枪(35),与两个无线信号输出系统平行;电动枪的第四电机(28)安装在第一无线信号输出系统的盒子上,电机的轴与“z”字形杆的一端连接,“z”字形杆的另一端正好落在电动枪的
ꢀ“┗”
字形撞针(29)上;第二继电器(6)、第一继电器(5)、第五继电器(4)安装于长方形底板的前面,第四继电器(9)安装于长方形底板左侧的面板上,第六继电器(7)、第三继电器(8)安装于立体三角形上宽的一面上,在两个无线信号输出系统的后面;两个无线信号输出系统旁安装有第一三极管(18)、第二三极管(17),和第二电池(13)、第四电池(14);第一电池(10)安装于底板的长方形凹槽的边上;第三电池(12)安装于长方形底板的左边前侧面上;第五电池(11)、第六电池(30)、第七继电器(31)和第八继电器(32)可装于能安装的地方;第一电机(1)和第二电机(2)安装于长方形底板的右侧,第二电机的左右两边各安装一根第一限制杆(24);第三电机(3)安装于长方形底板的左侧,第三电机的左右两边各装一根第二限制杆(25);其中,第一无线信号输出系统(16)的信号输出连接第一三极管的基极,其集电极连接第二电池的正极,发射极经第七继电器、第三继电器、第四继电器和第一继电器串连后回到第二电池的负极;第二无线信号输出系统(15)的信号输出连接第二三极管的基极,其集电极连接第四电池的正极,发射极经第八继电器、第六继电器、第五继电器和第二继电器串连后连接到第四电池的负极;其中,第一电池的电流经第一继电器的公共端和常闭端,经第一电机,经第二继电器的常闭端和公共端回到第一电池的负极;其中,第三电池的正极电流经第四继电器的公共端和常开端,经第五继电器的公共端和常闭端,经第二电机后回到第三电池的负极;其中,第五电池的正极电流,经第三继电器的公共端和常闭端,经第第六继电器的常开端和公共端,经第三电机后回到第五电池的负极;其中,第六电池的正极电流经第七继电器的公共端和常开端、经第四电机,经第八继电器的常开端和公共端回到第六
电池的负极;第一电机的转动轴连接倒反“z
”’
字形的第一倒反杆的一端;第一倒反杆的另一端套着第一拉杆(23)和其一端的孔套着立体三角形右前上的第一拉环;第二电机的转动轴连接倒反“z
”’
字形的第二倒反杆的一端,其另一端被第二拉杆(22)上套着,第二拉杆再套着立体三角形左后侧边固定的第二拉环(21);第三电机连接倒反“z
”’
字形的第三倒反杆的一端,倒反杆的另一端被第三拉杆(20)套着,第三拉杆套着立体三角形上的第三拉环(19)。
8.在图2中,第六电池(30)的正极连接到第七继电器(31)的公共端,从第七继电器的常开端出来连接到第四电机(28)后,再连接到第八继电器(32)的常开端,从第八继电器的公共端出来,连回到第六电池的负极;第四电机的轴上连接“z
”’
字形杆的一端,另一端落在电动枪(35)上的
“┗”
字形撞针(29)上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1