一种双射击式模式的可穿戴武器臂装置的制作方法
1.本发明属于单兵装备技术领域,具体涉及一种双射击式模式的可穿戴武器臂装置。
背景技术:
2.传统意义上的单兵作战武器主要依靠士兵的双手操作,由于人体肌肉力量有限,使得单兵作战武器的重量和威力受到限制。同时士兵面临的作战任务日趋复杂,如何提高士兵的作战效能,适应不同的作战条件,特别是拐角射击的需求,是目前亟需解决的问题。
3.专利us20180364004a1公开了一种第三只手武器接口系统,与防护背心相连,能挂载多种单兵武器,为武器提供支撑,减轻穿戴者手臂的负重,减缓肌肉疲劳提高射击精度。但是使用该装置时仍需穿戴者自己握持武器,不能完全解放穿戴者双手,不具备自动控制武器和拐角射击等功能。
技术实现要素:
4.本发明的目的在于提供一种双射击式模式的可穿戴武器臂装置,士兵穿戴本装置对武器进行自动或手动操作,改变了传统武器的作战样式,大大提高了士兵的作战效能和作战任务的适应性。
5.实现本发明目的的技术解决方案为:一种双射击式模式的可穿戴武器臂装置,包括:
6.武器挂载臂:一端挂载枪械,另一端通过方向轴与稳定操控机构连接;
7.稳定操控机构:包括电推杆和大扭矩舵机,通过控制电推杆的伸长与回缩实现对挂载枪械枪口的俯仰角操控;通过控制大扭矩舵机直接带动方向轴转动实现挂载枪械的方向角指向;且在手动模式下提供枪械垂直方向运动的自由度,使得穿戴者可握持操作枪械灵活的上下移动;
8.下臂铰接与锁定机构:一端与稳定操控机构连接,具有拐角锁定功能,通过稳定操控机构操控枪械进行拐角射击;
9.战术背心穿戴接口;与下臂铰接与锁定机构连接,用于实现武器臂装置的可穿戴。
10.进一步的,所述武器臂装置上的电子器件均由大容量锂电池提供驱动电源,武器臂装置采用无线电信号接收的方式接收由单兵系统或无线遥控器发送的控制指令,进而驱动电推杆和大扭矩舵机完成动作。
11.进一步的,所述武器挂载臂包括方向走,过渡臂和用于挂载枪械且同时兼具双向缓冲器功能的枪械挂载接口组件;
12.所述过渡臂为镰刀形结构,一端有三个螺纹间隙孔用于与方向轴采用螺栓紧固连接,另一端开有圆孔通过高低轴与枪械挂载接口组件连接。
13.进一步的,枪械挂载接口组件包括高低轴,缓冲滑轨,缓冲弹簧轴,缓冲弹簧轴挡圈,缓冲弹簧,缓冲弹簧轴套筒,皮卡汀尼导轨夹具主体;
14.皮卡汀尼导轨夹具用于与枪械上的皮卡汀尼导轨连接紧固,实现将枪械与武器臂连接;
15.枪械发射后坐时,皮卡汀尼导轨夹具主体跟随枪身后坐时带动缓冲弹簧轴套筒压缩缓冲弹簧,复进前冲时带动缓冲弹簧轴挡圈继续压缩缓冲弹簧,在整个缓冲动作过程中缓冲弹簧都处于被压缩状态。
16.进一步的,所述稳定操控机构还包括四边形长臂,四边形下短臂组件,四边形上短臂组件和四边形限位锁定组件;
17.所述电推杆,四边形长臂,四边形下短臂组件和四边形上短臂组件分别作为四边形的每单条边,相互铰接组成四边形框架结构,相邻的两条边可相对转动;
18.所述四边形限位组件用于限制稳定操控机构变形量。
19.进一步的,所述四边形下短臂组件一端与下臂铰接与锁定机构连接,另一端作为四边形的一条边分别于电推杆和四边形长臂铰连接;
20.四边形下短臂组件包括两块下短臂装配板,平衡弹簧轴销和转动轴销,两块下短臂装配板通过转动轴销装配。
21.进一步的,所述四边形上短臂组件一端与武器挂载臂连接,另一端作为四边形的一条边分别于电推杆和四边形长臂铰连接;
22.四边形上短臂组件包括两块上短臂装配板,平衡弹簧轴销,转动轴销,大扭矩舵机,u型舵机支架,法兰轴套和方向轴支撑座;
23.所述大扭矩舵机控制挂载枪械的方向角指向,使用u形舵机支架固定在四边形上短臂组件上,u形舵机支架与两块四边形上短臂装配板之间使用螺栓连接固定,所述大扭矩舵机其扭矩输出端与法兰轴套连接;所述法兰轴套的另一端与方向轴过盈配合;
24.法兰轴套与方向轴支撑为间隙配合,并在方向轴支撑座中转动。
25.进一步的,所述稳定操控机构还包括平衡弹簧,平衡弹簧连接稳定操控机构对角装配的平衡弹簧轴销,通过自身弹性变形阻力,阻碍四边形框架的变形以实现对挂载武器的稳定支撑作用;
26.所述四边形限位锁定组件包括限位杆,限位杆一端铰接于下短臂组件的中间位置,另一端在四边形长臂中空槽里滑动,限制稳定操控机构变形量;
27.所述在武器臂自动控枪械模式下,锁定状态下的限位锁定组件与四边形下短臂和四边形长臂共同形成稳定的三角形结构,阻止下短臂和四边形长臂之间的相对转动,实现对稳定操控机构的锁定。
28.进一步的,所述下臂铰接及锁定机构包括第一铰接臂,第二铰接臂,第三铰接臂和直角锁定块;
29.所述第一铰接臂一端与战术背心穿戴接口连接,另一端与第二铰接臂的一端铰接,同时第二铰接臂另一端与第三铰接臂的一端铰接,第三铰接臂的另一端与稳定操控机构连接;
30.直角固定块放置于第二铰接臂中空位置,其一端与第二铰接臂中空位置一侧铰接;
31.所述三个铰接臂和直角锁定块均为中空的框架结构,每个铰接臂和直角锁定块均可绕其铰接位置相对转动;
32.所述在武器臂自动操控枪械模式下需要使多个铰接臂之间构成相对锁定的状态;
33.所述铰接臂的锁定状态实施方式为:第一铰接臂、第二铰接臂、第三铰接臂上加工有锁定销插孔,将第一铰接臂与第二铰接臂水平对齐并,使用锁定销插入对齐后的插孔中,限制其相对转动实现锁定;第二铰接臂与第三铰接臂在直角固定块的配合下,摆成一个直角三角形结构,使用锁定销插入第三铰接臂中的插孔中实现锁定。
34.进一步的,所述的战术背心穿戴接口包括战术背心插板和转接块;
35.所述战术背心插板用于实现武器臂装置的可穿戴功能,外形类似于军用标准的硬质防弹衣插板,战术背心插板底端有三组螺栓连接孔;所述战术背心插板插入士兵穿戴的单兵战术背心中,所述转接块与第一铰接臂一端连接,转接块与战术背心插板用螺栓紧固连接。
36.本发明与现有技术相比,其显著优点在于:
37.(1)本发明具有自动操控枪械射击的功能,通过电推杆和舵机控制枪口指向,解放了士兵双手,同时可将枪械挂载端伸出掩体,实现掩体后拐角射击功能,有效打击隐匿在射击死角后的敌人。
38.(2)本发明的武器挂载接口处采用了双向缓冲器的设计,用以缓冲枪械发射时的后坐力,有效减少枪口跳动,降低穿戴者承受的后坐力冲击,提高了射击稳定性和人机工效。
39.(3)本发明的下连接臂铰接机构具有拐角锁定功能,可使本发明稳定地操控枪械进行拐角射击。
40.(4)本发明四边形结构的稳定操控机构上设计有限位锁定装置,一方面可防止四边形的变形量过大造成失稳,另一方面在自动控制枪械模式下可有效锁定该机构。
41.(5)通过穿戴本发明装置可将武器的重量分散到人体躯干,有效减轻了穿戴者的双手负重和疲劳,增加了持枪的舒适性和稳定性,提高了射击精度。
附图说明
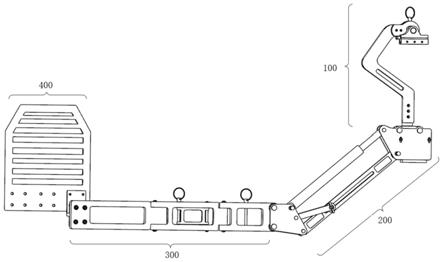
42.图1本发明可穿戴武器臂装置示意图。
43.图2本发明的武器臂操控枪械示意图。
44.图3本发明的武器臂装置人体穿戴示意图。
45.图4本发明的武器臂装置操控枪械进行拐角射击演示的俯视图。
46.图5本发明的武器臂装置操控枪械进行拐角射击演示的侧视图。
47.图6武器臂控制挂载枪械的俯仰角指向的实施示意图;其中图(a)为俯角位置,图(b)为仰角位置。
48.图7武器挂载臂的示意图;其中图(a)为挂载臂整体,图(b)为过渡臂,图(c)为武器挂载接口组件。
49.图8稳定操控机构的示意图。
50.图9稳定操控机构的爆炸图。
51.图10挂载枪械的竖直方向运动示意图。
52.图11下臂铰接与锁定机构的爆炸图。
53.图12下臂铰接与锁定机构的锁定状态图。
54.图13第二铰接臂与第三铰接臂的直角锁定示意状态图。
55.图14战术背心穿戴接口示意图;其中图(a)为穿戴方案的实施,图(b)为转接块结构示意。
56.附图标记说明:
[0057]1‑
穿戴者,3
‑
单兵作战控制系统,100
‑
武器挂载臂,200
‑
稳定操控机构,300
‑
下臂铰接与锁定机构,400
‑
战术背心穿戴接口机构,101
‑
方向轴,102
‑
过渡臂,103
‑
滑动轴承,104
‑
过渡臂配合片,110
‑
高低轴,111
‑
缓冲滑轨,112
‑
缓冲弹簧轴,113
‑
缓冲弹簧轴挡圈,114
‑
缓冲弹簧,115
‑
缓冲弹簧轴套筒,116
‑
限位螺母,117
‑
皮卡汀尼导轨夹具主体,118
‑
夹具配合片,120
‑
高低轴卡簧,121
‑
紧固螺母,123
‑
紧固螺栓,140
‑
插销,201
‑
下短臂装配板ⅰ,202
‑
下短臂装配板ⅱ,203
‑
上短臂装配板ⅰ,204
‑
上短臂装配板ⅱ,210
‑
平衡弹簧轴销,211
‑
转动轴销,212
‑
轴套,213
‑
轴销卡簧,214
‑
电推杆,215
‑
四边形长臂,221
‑
限位杆,222
‑
手拧螺母,230
‑
大扭矩舵机,231
‑
u形舵机支架,232
‑
舵机固定螺栓,233
‑
法兰轴套,234
‑
方向轴支撑座,235
‑
支撑座固定螺栓,236
‑
平面轴承,240
‑
平衡弹簧,302
‑
转接块,310
‑
第一铰接臂,311
‑
铰接轴ⅰ,320
‑
第二铰接臂,321
‑
铰接轴ⅱ,322
‑
直角锁定块,330
‑
第三铰接臂,331
‑
铰接轴ⅲ,401
‑
背心插板,402
‑
转接块,403
‑
防弹背心,10
‑
锁定销。
具体实施方式
[0058]
为了使本发明的目的、技术方案及优点更加清楚明白,以下通过具体实施例,并结合附图,对本发明进行较为详细的说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0059]
参见图1所示,本实施方式为一种双射击模式的可穿戴武器臂装置包括武器挂载臂100,稳定操控机构200,下臂铰接与锁定机构300,战术背心穿戴接口机构400。
[0060]
图4和图5演示了可穿戴武器臂自动控枪械模式下进行掩体后拐角射击功能的实施:首先使用插销将武器臂上自由转动的部件进行限位固定,穿戴者1藏身于掩体后方,保证自己身体部位没有暴露的情况下将武器臂机械臂探出掩体;穿戴者1通过操作单兵作战控制系统3控制可穿戴武器臂上挂载的枪械对准目标进行射击。
[0061]
参见图6所示,在武器臂自动控枪械模式下,挂载枪械的俯仰角指向由电推杆214实现。通过控制电推杆214的伸长与回缩实现挂载武器的俯仰角指向。图6(a)所示,当电推杆214伸长时挂载武器向低角度指向;图6(b)所示,当电推杆214回缩时挂载武器的指向角向高角度扬起。
[0062]
参见图7所示,所述武器挂载臂100包括方向轴101、过渡臂102、武器挂载接口组件图7(c)。所述过渡臂102的一端与方向轴101采用螺栓紧固连接,另一端通过高低轴110与武器挂载接口组件连接。
[0063]
进一步的,在所述武器臂自动控枪械模式下需要使用插销140锁定高低轴110的转动。
[0064]
进一步的,所述武器挂载接口组件图7(c)包括高低轴110、缓冲滑轨111、缓冲弹簧轴112、缓冲弹簧轴挡圈113,缓冲弹簧114、缓冲弹簧轴套筒115、皮卡汀尼导轨夹具主体117。
[0065]
所述双向缓冲器功能,其实现原理为,枪械发射时受后坐力的影响使得枪身后坐
运动,此时皮卡汀尼导轨夹具主体117跟随枪身后坐带动缓冲弹簧轴套筒115压缩缓冲弹簧114,复进前冲时带动缓冲弹簧轴挡圈113继续压缩缓冲弹簧114,在整个缓冲动作过程中缓冲弹簧114始终处于被压缩状态。
[0066]
参见图8和图9所示,所述稳定操控机构200包括电推杆214、四边形长臂215、平衡弹簧240、四边形下短臂组件、四边形上短臂组件和四边形限位锁定组件。
[0067]
进一步的,电推杆214、四边形长臂215、四边形下短臂组件和四边形上短臂组件分别作为四边形的每单条边,相互铰接组成四边形框架结构200,相邻的两条边可相对转动。
[0068]
参见图9所示,所述四边形上短臂组件包括两块上短臂装配板(203和204)、平衡弹簧轴销210、转动轴销211、大扭矩舵机230、u型舵机支架231、法兰轴套233和方向轴支撑座234。四边形上短臂组件一端与武器挂载臂100连接,另一端作为四边形的一条边分别于电推杆214和四边形长臂215铰连接。
[0069]
进一步的,所述大扭矩舵机230用于控制挂载枪械的方向角指向,其扭矩输出端与法兰轴套233连接;
[0070]
进一步的,所述大扭矩舵机230使用u形舵机支架231固定在四边形上短臂组件上,u形舵机支架231与四边形上短臂装配板(203和204)之间使用螺栓连接固定。
[0071]
参见图10所示,稳定操控机构200主要起对挂载武器的支撑与稳定作用和垂直方向的操控自由度。使用稳定弹簧240连接稳定操控机构200对角线装配的平衡弹簧轴销210,通过稳定弹簧240的自身弹性变形阻力,阻碍稳定操控机构200的变形以实现对挂载武器的稳定支撑作用。
[0072]
进一步的,所述在武器臂自动控枪械模式下,拧紧手拧螺母222使得锁定机构进入锁定状态,此时锁定机构与四边形下短臂201、下长臂215形成三角形结构,防止下短臂201和下长臂215之间的相对转。
[0073]
参见图11所示,所述下臂铰接及锁定机构300包括第一铰接臂310、第二铰接臂320、第三铰接臂330和直角锁定块322;第一铰接臂310一端与转接块302连接,另一端与第二铰接臂320的一端铰接,同时第二铰接臂320另一端与第三铰接臂330的一端铰接,第三铰接臂330的另一端与稳定操控机构连接。
[0074]
参见图12所示,在武器臂自动控枪械模式下,使用锁定销10插入锁定孔将第一铰接臂310与第二铰接臂320呈水平锁定,阻止第一铰接臂310与第二铰接臂320之间的相对转动。
[0075]
进一步的,在手动持枪模式下,下臂铰接锁定机构300的作用是,穿戴者手动握持枪械,铰接的各个板提供给挂载枪械一定的操作自由度,把对穿戴者的动作干涉降到最低,同时承托枪械的重量。
[0076]
参见图13所示,在武器臂自动控枪械模式下,需使用锁定销10插入直角锁定块322与第三铰接臂330对齐的锁定孔中,此时第二铰接臂320与直角锁定块322及第三铰接臂330形成一个稳定的直角三角形结构,且第二铰接臂320与第三铰接臂330呈直角锁定,阻止第三铰接臂330与第二铰接臂320之间的相对转动。
[0077]
参见图14所示,所述战术背心穿戴接口机构400包括一个外形类似于防弹衣的标准硬质插板的战术背心插板401和武器臂转接块402。
[0078]
进一步的,参见图14(a)所示,将背心插板401插入士兵1穿戴的单兵战术防弹背心
403的插板放置处,实现将武器臂装置穿戴于人体上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1