一种火炮身管清洗机器人的制作方法
1.本公开涉及一种清洗机器人,尤其涉及一种火炮身管清洗机器人。
背景技术:
2.火炮是一个由弹药发射装置,火控系统和行动系统组成的武器综合系统。在复杂的火炮结构中,炮身是火炮的重要的组成部分,炮身又由身管、炮尾、炮闩等部件组成,其中身管是重中之重。火炮射击时,身管的工作环境极为恶劣。由于高温高压的作用,此时会使炮弹发射时产生的物质粘附在身管内壁上,形成积炭。
3.火炮内表面结构为螺旋形膛线,膛线的作用在于付予弹头旋转的能力,使弹头在出膛之后,仍能保持既定的方向。弹丸在膛线的作用下旋转,与高速旋转的陀螺运动原理相同,从而保证了弹丸的稳定飞行。倘若膛线磨损,弹丸得不到应有的旋速,弹丸飞行的稳定性就会受到影响。另外,膛线崩落、损伤等,都会使弹丸在飞行时失去稳定性,严重影响火炮的性能。因为积炭的存在,会黏附在内膛的阴阳面上,在火炮的后续发射过程中,有可能损伤膛线,因此火炮一旦射击完后,应及时进行清洗,否则,将影响下次射击的准确度。同时,在潮湿的环境下,将会引起炮管材料的腐蚀,因此必须定期对火炮内膛进行清洗工作,去除发射后附着在膛线上的积炭,保证火炮内膛的清洁,从而确保武器的正常使用和射击精度。
4.目前火炮内目前火炮内膛进行清洗工作大多采用人工机械擦洗的方法去除火炮发射后形成的积炭,此方法费时费力,效果不佳。
技术实现要素:
5.为了解决上述技术问题中的至少一个,本公开提供了一种火炮身管清洗机器人。
6.本公开的技术方案是这样实现的:
7.一种火炮身管清洗机器人,包括驱动单元、行走装置和清洗装置,所述驱动单元通过主轴驱动所述行走装置和清洗装置;
8.所述清洗装置包括安装于所述主轴上并可随所述主轴转动的至少一个大锥齿轮,每个所述大锥齿轮均与若干个小锥齿轮啮合;每个所述小锥齿轮分别与一刷子相连,并可带动所述刷子自转。
9.进一步地,所述小锥齿轮沿所述大锥齿轮的周向均匀间隔分布,相邻的两个所述大锥齿轮上的小锥齿轮相互交错设置。
10.进一步地,所述小锥齿轮的轴心线与所述主轴的轴心线垂直。
11.进一步地,所述小锥齿轮可转动地安装于所述清洗装置的壳体上,并且每个所述小锥齿轮均通过刷架与刷子可拆卸地相连。
12.进一步地,所述行走装置包括前行走装置和后行走装置,所述前行走装置和后行走装置分别设于所述清洗装置的前后两侧。
13.进一步地,所述前行走装置和后行走装置均包括蜗杆和多个蜗轮,所述蜗杆与所述主轴固定相连,多个所述蜗轮沿所述蜗杆周向间隔排列;每个所述蜗轮对应驱动一行走
轮转动。
14.进一步地,所述前行走装置和所述后行走装置的蜗轮数量均为三个;三个所述蜗轮按120
°
间隔圆周均布啮合于所述蜗杆上。
15.进一步地,所述蜗杆为蜗杆套,所述蜗杆套套设于所述主轴上。
16.进一步地,还包括电机舱段,所述驱动单元安装于所述电机舱段内,所述驱动单元包括电机,所述电机与所述主轴传动连接。
17.进一步地,还包括电气舱段,所述电气舱段内装有控制系统,用于控制机器人执行相应的动作。
附图说明
18.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
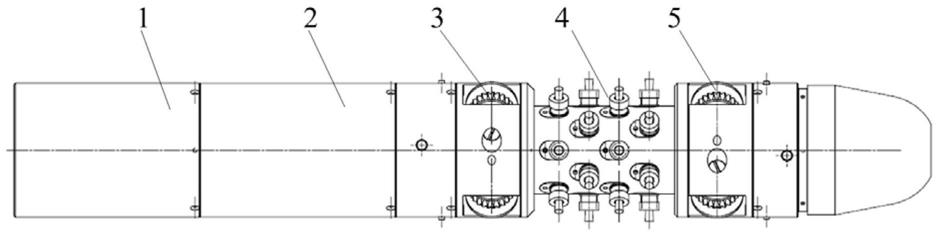
19.图1是本公开的火炮身管清洗机器人的结构示意图;
20.图2是本公开的火炮身管清洗机器人的原理机构示意图;
21.电气舱段1、电机舱段2、清洗装置4、后行走装置3、前行走装置5、电机201、蜗杆301、蜗轮302、大锥齿轮401、小锥齿轮402、主轴403;
具体实施方式
22.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
23.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开。
24.参照图1和图2,本实施例提供了一种火炮身管清洗机器人,包括驱动单元、行走装置和清洗装置4,所述驱动单元通过主轴403驱动所述行走装置和清洗装置4;所述清洗装置4包括安装于所述主轴403上并可随所述主轴403转动的至少一个大锥齿轮401,每个所述大锥齿轮401均与若干个小锥齿轮402啮合;每个所述小锥齿轮402分别与一刷子相连,并可带动所述刷子自转。
25.本公开通过所述主轴403带动所述大锥齿轮401进而驱动所述小锥齿轮402自转,传动结构紧凑、高效,另外,所述大锥齿轮401的直径远大于所述小锥齿轮402的直径,在进行传动时,起到了变速的作用,使得所述小锥齿轮402的转速提高,提高清洗效率。
26.参照图1和图2,所述小锥齿轮402沿所述大锥齿轮401的周向均匀间隔分布,优选的,所述小锥齿轮402的数量应使得相邻的所述刷子接触身管内壁的一端相互贴近,尽量减少所述刷子之间的清洗间隙,同时,为了提高清洗效果,避免出现清洗死角,可以设置多组所述大锥齿轮401,并且相邻的两个所述大锥齿轮401上的所述小锥齿轮402相互交错设置,相互填补刷子之间的间隙。通过设置多圈刷子,保证能够覆盖全部身管内壁。
27.参照图1和图2,本实施例中,所述小锥齿轮402可转动地安装于所述清洗装置4的壳体上,并且每个所述小锥齿轮402均通过刷架与刷子可拆卸地相连。所述小锥齿轮402的
轴心线与所述主轴403的轴心线垂直,使得所述刷子的自转轴与清洗装置4的壳体轴向相垂直。本实施例中,所述刷子采用可更好结构,当磨损超过一定范围时,或者需要更换不同规格型号的刷子时,可以方便的进行更换,本实施例的刷子可以为清洗刷,也可以更换为油刷等。
28.参照图1和图2,本实施例中,所述电机201通过主轴402驱动大锥齿轮401转动,带动小锥齿轮转动402,进而实现刷子的自转,在清洗过程中,清洗机器人进入身管中,刷子与身管内壁接触,并通过不断的自转实现对身管内壁的清洗,清洗机器人可在身管中行走,实现对身管内壁清洗的全覆盖。本实施例中,一个大锥齿轮401就可以带动多个小锥齿轮402同时相互独立的转动,使得每个刷子都能够独立的进行自转,一个刷子损坏也不影响其他刷子正常工作,具有较好的容错能力,而且使得清洗的效果极大的提升。
29.参照图1,所述行走装置包括前行走装置5和后行走装置3,所述前行走装置5和后行走装置3分别设于所述清洗装置4的前后两侧。前行走装置5和后行走装置3能够给机器人提供足够的支撑,使得保持机器人的平衡。
30.参照图1和图2,本实施例中,所述前行走装置5和后行走装置3均包括蜗杆和多个蜗轮,所述蜗杆301与所述主轴403固定相连,多个所述蜗轮302沿所述蜗杆301周向间隔排列;每个所述蜗轮302对应驱动一行走轮转动。所述行走轮的轴心线与相对应的蜗轮302的轴心线重合,使得所述行走轮与对应的蜗轮302同轴转动。当电机201带动所述主轴403转动时,主轴403将带动所述蜗杆301转动,进而带动蜗轮302旋转,蜗轮302将带动对应的行走轮转动,使得行走装置带动机器人前进或后退。
31.参照图1和图2,本实施例中,所述前行走装置5和所述后行走装置3的蜗轮302数量均为三个;三个所述蜗轮按120
°
间隔圆周均布啮合于所述蜗杆301上。由于每个蜗轮301上对应驱动连接有一个行走轮,即前行走装置和后行走装置将分别有三个行走轮,当机器人进入身管时,三个行走轮将支撑于身管内壁,使得清洗装置位于中心位置。
32.为便于安装,本实施例中,所述蜗杆301为蜗杆套,所述蜗杆套套设于所述主轴403上。
33.参照图1和图2,本实施例的清洗机器人还包括电气舱段1和电机舱段2、所述驱动单元安装于所述电机舱段内,所述驱动单元包括电机201。所述电机201与所述主轴403传动连接。所述电气舱段1内装有控制系统,用于控制清洗机器人执行相应的动作。通过控制系统可以实现自动控制,也可手动控制;另外,电气舱段1与外部的电源连接。清洗机器人的供电采用线缆供电的方式,清洗机器人拖着线缆进入炮膛工作。既可以采用直流电,也可以采用交流电。本实施例的清洗机器人不仅可以用于清洗炮膛内壁,还可以清洗各种管道的内壁。
34.参照图1和图2,本实施例的清洗机器人,利用电机201带动主轴403转动,前行走装置5和后行走装置3的蜗杆301,以及清洗装置4的大锥齿轮401均与所述主轴403相连,并随着主轴转403动,做到一个电机驱动,清洗装置和行走装置同步进行,采用上述结构的清洗机器人,传动结构简单,布局紧凑,使得清洗机器人体积小、重量轻,单人就可以携带和操作。
35.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可
以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1