控制棒驱动机构下部Ω焊缝视频检查装置的制作方法
控制棒驱动机构下部
ω
焊缝视频检查装置
技术领域
[0001]
本发明属于核电站无损检测技术领域,具体涉及一种控制棒驱动机构下部ω焊缝视频检查装置。
背景技术:
[0002]
在压水堆核电站中,如图1、图2,控制棒驱动机构(crdm)安装在反应堆压力容器顶盖上,周围被保温层包裹,是实现反应堆启动、功率调节、停堆的核关键设备,也是反应堆一回路压力边界的重要组成部分。控制棒驱动机构的完整性直接关系到核电站的安全运行。控制棒驱动机构(crdm)长期在高温、高压、强辐射及硼酸的恶劣环境下运行,存在产生应力腐蚀裂纹的风险。尤其是控制棒驱动机构的ω焊缝在焊接过程中,可能产生未焊透、未融合、气孔和夹渣等焊接缺陷,在长期运行中,可能会出现腐蚀、裂纹等损伤。此外,控制棒驱动机构ω焊缝处在停堆检查期间的辐射剂量高,以及控制棒驱动机构分布密集,增加检查的难度。因此,在不拆除保温层的情况下,研制一套携带摄像头的机器人通过通风孔进入到封闭空间内,进行自动化检查,可以提高检查的覆盖率,降低人员的受辐射剂量。
技术实现要素:
[0003]
本发明的目的在于提供一种控制棒驱动机构下部ω焊缝视频检查装置及方法,针对高辐射环境下、封闭空间
[0004]
本发明的技术方案如下:一种控制棒驱动机构下部ω焊缝视频检查装置,该装置包括车体、多自由度机械臂以及云台摄像头,其中,车体可直行、后退及转弯,在车体上设置有多自由度机械臂,所述多自由度机械臂可收拢或端部提升一定高度;在所述的多自由度机械臂端部设置有云台摄像头;所述的多自由度机械臂处于收拢状态时,所述检查装置可整体通过压力容器上端通风孔进入保温层内。
[0005]
所述的车体包括电机、减速箱以及箱体,其中,在箱体内部设有两组电机以及相配套的减速箱;所述的两组减速箱输出分别与箱体两侧的轮胎传动连接,通过两组电机独立动力输出,控制车体前进、后退或转弯。
[0006]
所述的两个减速箱分别与两个电机相连接;两组锥齿轮通过轴承设置在减速箱输出端的箱体上,并使锥齿轮中心孔与减速箱转子相连接;所述的两组锥齿轮外圆与设置在箱体左右两端的传动轴相连接,在所述的传动轴上设有齿轮,并通过若干个齿轮传动与设置在箱体同侧另一端的转轴相连接,并在伸出箱体上的传动轴和转轴上设置有轮胎或者履带,利用两个电机分别为箱体左右两侧的轮胎或履带提供独立的动力输出,实现车体的前进、后退和转弯。
[0007]
所述的多自由度机械臂包括底座、一级关节以及二级关节,其中,所述的一级关节下端通过一级传动轴与底座相连接,使所述的一级关节绕着一级传动轴相对于底座旋转;所述的二级棒状结构的二级关节通过二级传动轴与一级关节的上端端部相连接,使所述的二级关节可绕着二级传动轴相对于一级关节上端旋转;云台摄像头固定在二级关节的末
端。
[0008]
所述的云台摄像头包括摄像头底座、旋转环以及俯仰球,其中,旋转环18 固定在摄像头底座上,并在旋转环端部安装有俯仰球上,旋转环可绕摄像头底座360度旋转,俯仰球可绕着旋转环进行180度俯仰;在俯仰球上固定安装有摄像头和led灯。
[0009]
本发明的显著效果在于:本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置及方法,采用轮式车搭载机械臂及云台摄像头对控制棒驱动机构ω焊缝进行视频检测,能够实现不拆除保温层的情况下,解决高辐射环境下、密闭空间及密集分布控制棒驱动机构的视频检查难题,实现了自动化采集,降低人员受辐射剂量,实现焊缝检查的覆盖率,缩短了检测时间。
附图说明
[0010]
图1为现有的反应堆压力容器顶盖上控制棒驱动机构安装剖视图;
[0011]
图2为现有的反应堆压力容器顶盖上控制棒驱动机构分布俯视图;
[0012]
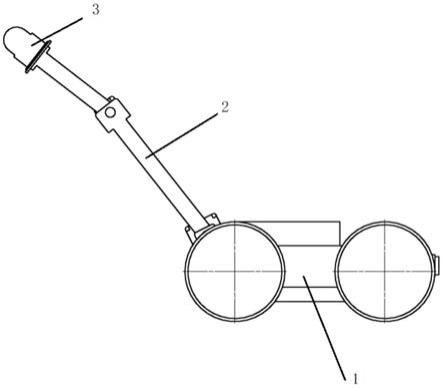
图3为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置结构示意图;
[0013]
图4为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置的侧视图;
[0014]
图5为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置收拢状态示意图;
[0015]
图6为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置中车体结构示意图;
[0016]
图7为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置中多自由度机械臂结构示意;
[0017]
图8为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置中云台摄像头结构示意图;
[0018]
图9为图8的侧视图;
[0019]
图10为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置在反应堆压力容器顶盖上保温层内展开示意图;
[0020]
图11为本发明所述的一种控制棒驱动机构下部ω焊缝视频检查装置在反应堆压力容器顶盖上保温层内行走路径示意图;
[0021]
图中:1、车体;2、多自由度机械臂;3、云台摄像头;4、电机;5、减速箱;6、锥齿轮;7、轴承;8、箱体;9、传动轴;10、齿轮;11、轮胎;12、底座;13、一级传动轴;14、一级关节;15、二级传动轴;16、二级关节;17、摄像头底座;18、旋转环;19、俯仰球;20、摄像头;21、led灯;22、第一空白区域;23、第二空白区域;24、第三空白区域;25、第四空白区域。
具体实施方式
[0022]
下面结合附图及具体实施例对本发明作进一步详细说明。
[0023]
如图3~11所示,一种控制棒驱动机构下部ω焊缝视频检查装置,包括车体 1、多自由度机械臂2以及云台摄像头3,其中,车体1上安装有多自由度机械臂2,并在多自由度机械臂2的末端安装有云台摄像头3,云台摄像头3可随自由度机械臂2在一定高度、一定范围内移动,多自由度机械臂2能够向另一端收拢,使整个视频检查装置高度降低,便于穿过反
应堆压力容器顶盖上的通风孔;
[0024]
如图6所示,车体1包括电机4、减速箱5、箱体8以及轮胎11,其中,在箱体8内部安装有两组电机4和减速箱5,每个减速箱5与各自电机4相连接,实现两组电机4的独立动力输出;两组锥齿轮6通过轴承7固定在减速箱5输出端的箱体8上,并使锥齿轮中心孔与减速箱5转子相连接;两组锥齿轮6外圆与安装在箱体8左右两端的传动轴9相连接,传动轴9上设有齿轮10,并通过若干个齿轮传动与固定在箱体8同侧另一端的转轴相连接,并在凸出箱体8 上的传动轴9和转轴上安装有轮胎11或者履带,利用两个电机4分布为箱体8 两侧的轮胎提供独立的动力输出,实现车体1的前进、后退和转弯。
[0025]
如图7所示,多自由度机械臂2包括底座12、一级关节14以及二级关节 16,其中,棒状结构的一级关节14下端通过一级传动轴13与底座12相连接,使一级关节14绕着一级传动轴13相对于底座12旋转;二级棒状结构的二级关节16通过二级传动轴15与一级关节14的上端端部相连接,使二级关节16可绕着二级传动轴15相对于一级关节14上端旋转;云台摄像头3固定在二级关节16的末端;
[0026]
如图8、图9所示,云台摄像头3包括摄像头底座17、旋转环18以及俯仰球19,其中,旋转环18固定在摄像头底座17上,并在旋转环18端部安装有俯仰球19上,旋转环18可绕摄像头底座360度旋转,俯仰球19可绕着旋转环进行180度俯仰;在俯仰球19上固定安装有摄像头20和led灯21。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1