一种前挂式夜间牵引追踪辅助瞄准器
1.本实用新型涉及瞄准器,具体涉及一种前挂式夜间牵引追踪辅助瞄准器。
背景技术:
2.瞄准器是一种光学瞄具,传统上主要使用在军事武器上,例如步枪。瞄准镜的光学系统通常在合适位置设置标线,借此为使用者提供精确的瞄准参照,并提高步枪的命中率。
3.随着社会经济的进步,瞄准器的使用范畴早已不局限在军事武器上。目前在射击运动及射击游戏通常亦会配备瞄准器,以降低射击运动或射击游戏的入门难度,例如于枪支、弓或十字弓上设置瞄准器,以提高命中率。
4.武警部队长期战斗在执勤处突、反恐维稳、抢险救灾一线,任务范围广,任务重,特别是执勤压力大。武警官兵在担负两看勤务时往往会面对夜间执勤或者白天视野不佳执勤的情况,造成任务不便。
技术实现要素:
5.为了解决上述问题,本实用新型提出了一种能够在夜间辅助追踪,锁定目标,缓解夜间巡逻执勤压力和瞄准压力的挂式夜间牵引追踪辅助瞄准器。
6.为了实现上述目的,本实用新型是通过以下技术方案来实现的:
7.一种前挂式夜间牵引追踪辅助瞄准器,包括壳体,所述壳体侧面设有用于安装的卡槽;所述壳体的前端设有球机摄像头,所述壳体的侧面设有旋转座,所述旋转座上设有探照灯和镭射线;所述壳体的顶部设有用于与枪支连接的旋转吸盘、强度调节器和方向调节孔;所述壳体与所述旋转吸盘之间可相互转动;所述球机摄像头的侧面设有追踪摄像头、主摄像头和热成像摄像头;
8.所述壳体内部还设有微型处理器、显示器和云台稳定器,所述追踪摄像头、主摄像头和热成像摄像头和球机摄像头与所述微型处理器电信号连接;所述微型处理器与所述旋转座驱动连接;所述追踪摄像头、主摄像头和热成像摄像头和球机摄像头与所述云台稳定器机械连接;
9.所述追踪摄像头、主摄像头和热成像摄像头和球机摄像头与所述显示器信号连接并将所拍摄到的成像到所述显示器中显示出来;
10.所述壳体靠近尾端的侧面设有可调节的臂带;所述壳体上还包括有卡槽,所述卡槽与探照灯对称设置在所述壳体的两侧。
11.进一步的,所述旋转吸盘包括吸盘主体和连接杆,所述吸盘主体的侧面设有固定吸附带;所述连接杆的一端与所述吸盘主体固定连接,所述连接杆的另一端与所述壳体的上端旋转连接。
12.进一步的,所述连接杆与壳体相连接的一端设有主齿轮,所述连接杆内设有微型电机,所述微型电机的转轴与主齿轮连接,所述壳体内固定连接有与所述主齿轮相互齿合的从齿轮。
13.进一步的,所述微型电机与所述微型处理器电信号连接。
14.进一步的,所述球机摄像头下方铰接有镜盖。
15.进一步的,所述旋转座为电动旋转台,所述微型处理器与电动旋转台电信号控制连接。
16.进一步的,所述壳体内还设有供电电池,所述供电电池为充电锂电池;所述供电电池与所述微型处理器、追踪摄像头、主摄像头、热成像摄像头、球机摄像头、探照灯、微型电机和电动旋转台供电。
17.进一步的,所述臂带为魔术贴调节臂带。
18.进一步的,所述壳体上设有开关按钮和指示灯,所述开关按钮和指示灯均与微型处理器连接。
19.本实用新型前挂式夜间牵引追踪辅助瞄准器,其有益效果在于:
20.(1)球机摄像头为红外成像探头,能够在夜间使人物成像,有效辅助夜间追踪,提高瞄准率和搜索。
21.(2)摄像头的探测到人物后将信息传送给微型处理器,微型处理器控制电动旋转台转动,带动探照灯和镭射线牵引指向标记目标,可快速且准确得发现难以观察的目标,大大提高了夜间或者白天视野不佳的情况下的搜索和瞄准效果。
22.(3)内置有云台稳定器,能够防止摄像机的抖动,使显示器中的画面更加稳定和清晰。
23.(4)在壳体的顶部设有旋转吸盘,能够挂在枪杆底部;在壳体的侧面设有与机枪枪刺部位相配合的卡槽,能够直接嵌入至枪刺的部位进行安装;在壳体的后侧设有可调节的臂带,可固定在搜索人员大臂外侧。固定方式多样化,且固定位置多样化,能够满足不同的需求,更加方便对搜索信息的掌握。
24.(5)本辅助瞄准器部件质量轻,摄像头的旋转角度大,能够达到360
°
,红外感应距离长,可放大倍率2
‑
5倍,100米之内清晰无误差,最大可视距离为 400
‑
500米;对射击精准度的影响小,对目标的追踪速度快。
附图说明
25.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
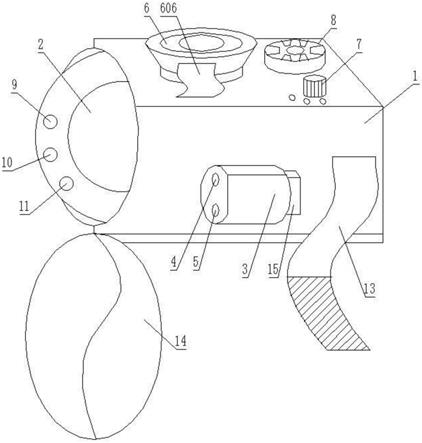
26.图1是本实用新型的结构示意图;
27.图2是图1的左视图;
28.图3是旋转吸盘与壳体的连接示意图;
29.图4是本实用新型瞄准器与枪支的连接示意图;
30.1壳体,2球机摄像头,3旋转座,4探照灯,5镭射线,6旋转吸盘,7强度调节器,8方向调节孔,9追踪摄像头,10主摄像头,11热成像摄像头,12卡槽, 13臂带,14镜盖,15电动旋转台;
31.601吸盘主体,602连接杆,603从齿轮,604微型电机,605主齿轮,606 固定吸附带。
具体实施方式
32.下面结合具体实施例及附图来进一步详细说明本实用新型。
33.实施例1
34.一种前挂式夜间牵引追踪辅助瞄准器,如图1
‑
4所示,包括壳体1,壳体1 侧面设有用于安装的卡槽12;壳体1的前端设有球机摄像头2,壳体1的侧面设有旋转座3,旋转座3上设有探照灯4和镭射线5;壳体1的顶部设有用于与枪支连接的旋转吸盘6、强度调节器7和方向调节孔8;壳体1与旋转吸盘6之间可相互转动;球机摄像头2的侧面设有追踪摄像头9、主摄像头10和热成像摄像头11;
35.壳体1内部还设有微型处理器、显示器和云台稳定器,追踪摄像头9、主摄像头10和热成像摄像头11和球机摄像头2与微型处理器电信号连接;微型处理器与旋转座3驱动连接追踪摄像头9、主摄像头10和热成像摄像头11和球机摄像头2与所述云台稳定器机械连接;
36.追踪摄像头9、主摄像头10和热成像摄像头11和球机摄像头2与显示器信号连接并将所拍摄到的成像到显示器中显示出来;
37.壳体1靠近尾端的侧面设有可调节的臂带13。
38.球机摄像头2下方铰接有镜盖14,镜盖14主要用于保护摄像头的镜头,使用时打开,不使用时关闭保护摄像头。
39.本实施例中,旋转吸盘6包括吸盘主体601和连接杆602,吸盘主体601的侧面设有固定吸附带606,固定吸附带606可为硅胶粘带,也可为魔术贴粘带;连接杆602的一端与所述吸盘主体601固定连接,连接杆602与壳体1相连接的一端设有主齿轮605,连接杆602内设有微型电机604,微型电机604的转轴与主齿轮605连接,壳体1内固定连接有与主齿轮605相互齿合的从齿轮603,微型电机604与所述微型处理器电信号连接。通过微型处理器中对微型电机604 的控制,使微型电机604通过主齿轮605带动从齿轮603转动,因为从齿轮603 是固定在壳体1内部的,因此从齿轮603的运行能够带动整个壳体1的运行,从而调整辅助瞄准器的瞄准方位。固定吸附带606主要是用于旋转吸盘吸附固定时套设在枪杆上,进一步保障吸附瞄准器的稳定。
40.本实施例中,在辅助瞄准器的后侧还设有臂带13,臂带13为魔术贴调节臂带13,可将辅助瞄准器固定在大臂外侧,且根据具体情况可调节的臂带13使辅助瞄准器可以较稳定地固定该仪器在上臂约上三分之一处,且方便操作和对显示器的查看。
41.本实施例中,壳体1上还包括有卡槽12,卡槽12与探照灯4对称设置在壳体1的两侧。即卡槽12设置在侧面,该卡槽12一般为外嵌式卡槽12。枪支的前端下方设有枪刺,该位置一般设有用于固定枪刺的卡扣。而该卡槽12与卡扣可相互配合,使辅助瞄准器能够固定在枪刺的位置,且也不影响枪支的瞄准。
42.另外,在本实用新型中所述的卡槽12并非固定结构,可根据枪支的枪刺的具体结构而进行匹配式设计。主要卡槽12与枪刺连接均在本实用新型的保护范围之内。
43.本实施例中,壳体1内还设有供电电池,供电电池为充电聚合物锂电池;供电电池与微型处理器、追踪摄像头9、主摄像头10、热成像摄像头11、球机摄像头2、探照灯4、微型电机604和电动旋转台15供电。内置以3.7v电压, 3200mah电流供电,电量高,充电完成后可持续开机24h,探照灯4开启时可持续照射2h。
44.本实施例中,辅助瞄准器部件质量轻,预计400
‑
600克;摄像头的旋转角度大,能够
达到360
°
;红外感应距离长,可放大倍率2
‑
5倍,100米之内清晰无误差,大于100米受天气等因素影响会出现误差,最大可视距离为400
‑
500 米;对射击精准度的影响小;对目标的追踪速度快,部件灯光起源点可达1m/s,从而在100米范围内能快速转动摄像机的探头位置;采用usb接口充电方式,且装配方式多样化,可臂挂式和枪挂式。
45.使用原理:设备为辅助作战人员进行夜间作战,通过前方热成像摄像头11 和侧面的球机摄像头2相结合,发现敌特份子后,探照灯4处的镭射线5立即射向敌特份子,并经过微型处理器的算法系统实行锁定跟踪。
46.当需要进行夜间搜索时,根据情况将辅助瞄准器臂挂和枪挂进行安装,安装后开启电源,查看指示灯闪烁频率,绿灯长亮则可正常使用,黄灯长亮则热成像探头未开启。黄灯快闪则球机监控未正常开启,红灯长亮则镭射线5处电量不足或损坏,红灯快闪则电量不足。正常开启后,各个摄像头和部件均正常运行。当发现后,球机摄像头2可快速进行甄别。探照灯4和镭射线5可以直接照射到该装备自动侦测到不明生物,使得不明热成像物体(人)直接暴露,并通过显示器进行显示,执勤人员可以据此快速反应。
47.本实施例中,强度调节器7主要是对摄像机的成像强度、清晰度和显示器等进行的调节,而方向调节孔8为动调节摄像头的方向。强度调节器7和方向调节孔8为现有瞄准器或摄像头中的常规调节键,其调节机制和结构原理在此不以赘述。
48.本实用新型中,微型处理器为计算机视觉和模式识别技术在视频监控领域的应用,它能对视频图像中的目标进行自动地监测、识别、跟踪和分析。该微型处理器为常规的视频处理程序且应用在现有的瞄准器中,本实用新型采用的微型处理器为现有瞄准器中的常规的处理视屏成像的微型处理器,其结构和原理在此不以赘述。
49.本实用新型中,球机摄像头2为红外热成像探头,采用ccd
‑
a3感光器,即第三代数码夜视技术,将可见光图像数字化,在处理器中运算锁定主要目标。红外热成像技术是一种被动红外夜视技术,是通过非接触探测红外能量(热量),并将其转换为电信号,进而在显示器上生成热图像和温度值,并可以对温度值进行计算的一种检测设备,其原理是基于自然界中一切温度高于绝对零度 (
‑
273℃)的物体,每时每刻都辐射出红外线,同时这种红外线辐射都载有物体的特征信息,这就为利用红外技术判别各种被测目标的温度高低和热分布场提供了客观的基础。利用这一特性,通过光电红外探测器将物体发热部位辐射的功率信号转换成电信号后,成像装置就可以一一对应地模拟出物体表面温度的空间分布,最后经系统处理,形成热图像视频信号,传至显示屏幕上,就得到与物体表面热分布相对应的热像图,即红外热图像。
50.目前集成数万个乃至数十万个信号放大器,将芯片置于光学系统的焦平面上,无须光机扫描系统而取得目标的全景图像,从而大大提高了灵敏度和热分辨率,并进一步地提高目标的探测距离和识别能力。
51.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1