一种自动化柔性线路板撕膜整版撕膜机的制作方法
1.本实用新型涉及撕膜技术领域,具体地说,涉及一种自动化柔性线路板撕膜整版撕膜机。
背景技术:
2.柔性电路板的整板撕膜是柔性线路板在自动化流水线生产中的重要的一环,而自动化流水线生产就对生产效率和产能有要求,生产过程在时间上必须相等或成倍比,也就是说整板撕膜这一道工序的时间,必须跟上或适应整条生产线的节拍,如果慢了,下一道工序就要等,非常浪费时间,当今社会科技进步日新月异,电子产品更新迭代非常之快,柔性线路板是手机不可或缺的的零部件之一,柔性线路板会随着手机的更新换代而产生变化,生产线上的设备也最好能够适应柔性线路板的规格多样性,如果每次更换产品规格就要对产线上的设备大更换的话,不光是效率低下和浪费资源的问题,那也是企业不可承受之重,所以,适当提高设备通用性也需要进行解决,鉴于此,我们提出一种自动化柔性线路板撕膜整版撕膜机。
技术实现要素:
3.本实用新型的目的在于提供一种自动化柔性线路板撕膜整版撕膜机,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供一种自动化柔性线路板撕膜整版撕膜机,包括基准结构和位于基准结构下方的吸膜结构和,所述基准结构包括大板,所述大板上设有若干导套,所述基准结构上设有导向结构,所述导向结构包括第一导柱,所述第一导柱与所述导套滑动连接,所述第一导柱上方连接有上模载板,所述上模载板下方固定有第一气缸,所述第一气缸的另一端连接在所述大板上方,所述导向结构上方设有探针结构,所述探针结构包括上模板,所述上模板下方设有探针,所述上模板固定在所述上模载板上,所述探针结构下方设有载具定位结构,所述载具定位结构包括拖板,所述拖板下方设有第二导柱,所述第二导柱滑动连接在所述导套内,所述拖板上方设有垫高板,所述垫高板上方设有吸模板,所述吸模板上设有若干定位柱,所述吸模板上方设有载具,所述拖板下方连接有第二气缸,所述第二气缸固定在所述大板上,所述吸膜结构包括真空放大器,所述真空放大器位于所述吸模板下方。
5.作为本技术方案的进一步改进,所述吸模板的两侧设有侧板,所述侧板外侧设有电机,所述侧板内侧设有皮带,所述电机通过带轮带动所述皮带运动,所述皮带贴合在所述载具两侧下方。
6.作为本技术方案的进一步改进,所述侧板上设有感应器支架,所述感应器支架尾端设有感应器,所述感应器支架下方设有卡块。
7.作为本技术方案的进一步改进,所述侧板上方设有若干轴承,所述轴承侧面与所述载具侧面相贴合。
8.作为本技术方案的进一步改进,所述大板上固定有安装块,所述侧板下方连接有滑块,所述滑块与所述大板滑动连接。
9.作为本技术方案的进一步改进,所述大板上固定有安装块,所述安装块上连接有第三气缸,所述第三气缸位于所述载具前方,所述大板上固定有安装板,所述安装板上连接有第四气缸,所述第四气缸位于所述载具后方。
10.作为本技术方案的进一步改进,所述侧板之间设有固定块,所述固定块上设有丝杆,所述丝杆穿过所述侧板,所述丝杆两端设有固定轮,所述丝杆中间设有手动调节扳手。
11.作为本技术方案的进一步改进,真空放大器下方连接有加长桶,所述加长桶下方设有真空板,所述真空板下方设有密封板,所述密封板下方连接有法兰桶,所述法兰桶上连接有撕膜收集袋。
12.与现有技术相比,本实用新型的有益效果:
13.1、该自动化柔性线路板撕膜整版撕膜机中,通过设置的真空放大器配合探针结构,在探针通过撕膜孔将待撕的膜顶起后,通过气压差对脱落的膜进行吸附,使其脱落完成撕膜过程,改变原先由人工一片一片撕除贴膜的工作,以实现提高整体的产量、质量和效率。
附图说明
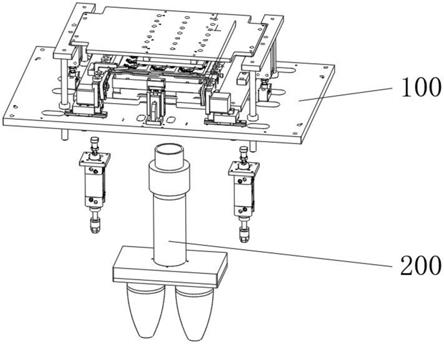
14.图1为实施例1的整体结构示意图;
15.图2为实施例1的基准结构拆分示意图;
16.图3为实施例1的调节和阻止结构示意图;
17.图4为实施例1的基准结构示意图;
18.图5为实施例1的吸膜结构示意图;
19.图6为图5a处结构局部放大图。
20.图中各个标号意义为:
21.100、基准结构;110、大板;111、导套;
22.120、导向结构;121、第一导柱;122、上模载板;123、第一气缸;
23.130、探针结构;131、上模板;132、探针;
24.140、载具定位结构;141、拖板;142、垫高板;143、吸模板;144、第二气缸;145、第二导柱;146、定位柱;147、载具;
25.160、第三气缸;161、安装块;
26.170、丝杆;171、固定块;172、手动调节扳手;173、固定轮;
27.180、电机;181、侧板;182、皮带;183、轴承;184、卡块;185、感应器支架;186、感应器;187、滑块;
28.190、安装板;191、第四气缸;
29.200、吸膜结构;210、真空放大器;220、加长桶;230、真空板;240、密封板;250、法兰桶;260、撕膜收集袋。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.实施例1
33.请参阅图1
‑
图6所示,本实施例提供一种自动化柔性线路板撕膜整版撕膜机,包括基准结构100和位于基准结构100下方的吸膜结构200和,基准结构100包括大板110,大板110上设有若干导套111,基准结构100上设有导向结构120,导向结构120包括第一导柱121,第一导柱121与导套111滑动连接,第一导柱121上方连接有上模载板122,上模载板122下方固定有第一气缸123,第一气缸123的另一端连接在大板110上方,导向结构120上方设有探针结构130,探针结构130包括上模板131,上模板131下方设有探针132,上模板131固定在上模载板122上,探针结构130下方设有载具定位结构140,载具定位结构140包括拖板141,拖板141下方设有第二导柱145,第二导柱145滑动连接在导套111内,拖板141上方设有垫高板142,垫高板142上方设有吸模板143,所述吸模板143上设有若干定位柱146,吸模板143上方设有载具147,拖板141下方连接有第二气缸144,第二气缸144固定在大板110上,吸膜结构200包括真空放大器210,真空放大器210位于吸模板143下方。
34.本实施例中,吸模板143的两侧设有侧板181,侧板181外侧设有电机180,侧板181内侧设有皮带182,电机180通过带轮带动皮带182运动,皮带182贴合在载具147两侧下方,通过皮带182带动载具147移动。
35.进一步的,侧板181上设有感应器支架185,感应器支架185尾端设有感应器186,感应器支架185下方设有卡块184,通过感应器186感应载具147的位置。
36.具体的,侧板181上方设有若干轴承183,轴承183侧面与载具147侧面相贴合,侧面设有的轴承183时载具147的移动更为顺畅。
37.除此之外,侧板181下方连接有滑块187,所述滑块187与所述大板110滑动连接,通过滑动调节侧板181之间的间距,便于适应不同规格的柔性电路板。
38.进一步的,大板110上固定有安装块161,安装块161上连接有第三气缸160,第三气缸160位于载具147前方,大板110上固定有安装板190,安装板190上连接有第四气缸191,第四气缸191位于载具147后方,对载具147的进出进行控制,配合感应器186,在撕膜过程中使得载具的前方和后方均被挡住,防止多个载具147进入撕膜位置。
39.除此之外,侧板181之间设有固定块171,固定块171上设有丝杆170,丝杆170穿过侧板181,丝杆170两端设有固定轮173,丝杆170中间设有手动调节扳手172,通过丝杆170,配合可以改变位置的固定轮173,在对侧板181之间的间距进行调节后可以进行固定,防止再次滑动。
40.进一步的,真空放大器210下方连接有加长桶220,加长桶220下方设有真空板230,真空板230下方设有密封板240,密封板240下方连接有法兰桶250,法兰桶250上连接有撕膜
收集袋260,为撕掉的磨提供收纳位置。
41.本实用新型在使用时,首先接通电源使真空放大器210开使工作,如本领域技术人员公知的那样,真空发生器的工作原理是利用喷管高速喷射压缩空气,在喷管出口形成射流,产生卷吸流动,在卷吸作用下,使得喷管出口周围的空气不断地被抽吸走,使吸附腔内的压力降至大气压以下,形成一定真空度。然后将柔性电路板送入载具147内,然后控制第一气缸123启动,带动上模板131下降并压住载具,同时探针132会穿过撕膜位置,使膜脱落,然后位于下方的的真空放大器210会通过压力差将脱落的膜吸走,完成整版撕膜。
42.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1