带有多个弹道计算器的激光测距仪的制作方法
带有多个弹道计算器的激光测距仪
1.相关申请的交叉引用
2.本技术要求2019年10月9日提交的美国临时专利申请第62/912,995号的优先权,并且是该申请的非临时申请,该申请的全部内容并入本文。
技术领域
3.在一个实施例中,本公开涉及带有一个以上的弹道解算器的激光测距仪。在一个实施例中,本公开涉及带有两个以上的弹道解算器的激光测距仪,以及被配置为与激光测距仪通信并激活弹道解算器的装置。在一个实施例中,该装置与一个以上的装置通信,一个以上的装置包括但不限于双筒望远镜、单筒望远镜、射弹观测镜和激光测距仪。
背景技术:
4.在比赛射击或西方狩猎中,基于目标的射程(range)、环境条件、步枪配置文件和子弹配置文件的弹道计算/修正对于做出精准的远程射击至关重要。用户更倾向于以实时的方式提供射程和弹道修正,并且无需将他们的视线从目标移开,离开诸如瞄准镜的观察光学镜。
5.在野外提供射程和弹道修正信息的传统方法涉及移动弹道应用程序或手工印刷的射程卡(涂料卡(dope cards))。然而,传统方法在野外并不实用。移动应用程序可能需要移动连接来运行,并且在偏远地区蜂窝信号可能无法使用。如果不存在网络连接,它将使得任何蓝牙连接测距仪或瞄准镜无法用于弹道修正数据。如果用作独立的移动应用程序,这仍然需要射击者离开瞄准镜以获得弹道解决方案。手工印刷的射程卡可以被贴到步枪,以便于获得射程和弹道修正信息。然而,这些条件代表及时快照,如果环境状况发生改变,这些条件可能会变得无用。
6.因此,仍然需要以精准、及时且有效的方式向用户提供弹道解决方案的装置、系统和方法。
技术实现要素:
7.在一个实施例中,本公开涉及一种用于提供弹道解决方案的装置。在一个实施例中,弹道解决方案装置与一个以上的附加的外部装置通信。在一个实施例中,弹道解决方案装置与一个以上的测距仪通信。在又一实施例中,该装置与一个以上的观察光学镜通信。在一个实施例中,该装置与一个天气追踪装置或导航装置或个人可穿戴装置或智能装置或弹道解算器(ballistic solver)通信。在一个实施例中,该装置通过独立于互联网和蜂窝连接的平台进行通信。
8.在一个实施例中,该装置是弹道计算器中心(ballistic calculator hub),其提供弹道解决方案并与一个以上的装置通信,一个以上的装置包括但不限于移动装置、移动计算机、台式计算机、ipad、天气追踪器装置、导航装置、可穿戴装置、显示装置和弹道解算器。在一个实施例中,弹道计算器中心进一步与一个以上的具有移动应用程序的移动装置
通信。在一个实施例中,弹道计算器中心进一步与一个以上的激光测距仪通信。在又一实施例中,弹道计算器中心进一步与一个以上的观察光学镜通信。在一个实施例中,弹道计算器中心不使用互联网或蜂窝通信与一个以上的外部装置通信。在一个实施例中,在没有互联网或蜂窝连接的情况下,弹道中心与一个以上的外部装置通信。
9.在一个实施例中,本公开涉及一种系统,包括:移动装置,其具有带有弹道解算器的移动应用程序,并且被配置为向弹道中心传送弹道解算器,弹道中心被配置为存储和操作弹道解算器,并且从测距仪接收射程,其中在没有互联网或蜂窝连接的情况下,弹道中心使用弹道解算器计算弹道解决方案。在一个实施例中,弹道中心通过独立于互联网和蜂窝连接的平台通信。
10.在一个实施例中,本公开涉及一种系统,包括:移动装置,其具有带有弹道解算器的移动应用程序,并且被配置为向弹道中心传送弹道解算器,弹道中心被配置为存储和操作弹道解算器,并且从测距仪接收射程,其中弹道中心不是测距仪的部件,并且在没有互联网或蜂窝连接的情况下,弹道中心与测距仪通信,其中在没有互联网或蜂窝连接的情况下,弹道中心使用弹道解算器计算弹道解决方案。
11.在一个实施例中,本公开涉及包括弹道中心的装置,弹道中心被配置为从激光测距仪接收射程并计算弹道解决方案,其中弹道中心包含于挂扣(fob)中。
12.在一个实施例中,挂扣具有3英寸以下的高度,3英寸以下的宽度和1英寸以下的深度的紧凑尺寸。
13.在一个实施例中,本公开涉及一种挂扣,其包括弹道中心,弹道中心被配置为从测距仪接收射程,并且具有弹道解算器以计算弹道解决方案,其中挂扣具有3英寸以下的高度,3英寸以下的宽度和1英寸以下的深度。
14.在一个实施例中,弹道中心不是测距仪的部件。在一个实施例中,弹道中心不是观察光学镜的部件。在一个实施例中,弹道中心不是移动应用程序。在一个实施例中,弹道中心不是天气追踪器装置的部件。
15.在一个实施例中,弹道中心没有并入到测距仪中。在一个实施例中,弹道中心没有并入到观察光学镜中。在一个实施例中,弹道中心没有并入到移动装置的移动应用程序中。在一个实施例中,弹道中心没有并入到天气追踪器装置中。
16.在一个实施例中,弹道中心是与测距仪分离且不同的装置。在一个实施例中,弹道中心是与观察光学镜分离且不同的装置。在一个实施例中,弹道中心是与天气追踪器装置分离且不同的装置。
17.在一个实施例中,本公开涉及一种系统,包括测距仪和用于提供弹道解决方案的弹道中心。测距仪将向弹道中心和/或移动电话发送信息,信息包括但不限于射程、配置文件、风等。在一个实施例中,弹道中心或移动电话将提供附加数据,附加数据包括但不限于温度、压力等,并且基于所提供的测距仪数据计算弹道解决方案。弹道解决方案将被回送到测距仪,并且与测距仪数据一起在测距仪显示器上显示。
18.在一个实施例中,本公开涉及一种包括弹道中心和具有移动应用程序的移动装置的系统。在一个实施例中,移动应用程序将是数据输入、用户设置和装置管理的主要模式,并且将包括装置配对;装置设置;枪械设置的选择;子弹设置和库的选择;阻力模型的选择;用户配置文件(保存的枪械、子弹和阻力模型配置文件)的选择和管理;查看装置环境传感
器和风向捕获;罗盘校准;单个和多个弹道显示;射程卡配置文件的选择和管理;以及目标参数的功能。
19.在一个实施例中,弹道中心具有以下功能:弹道解算器;温度;压力;湿度;用户配置文件和r射程卡配置文件。
20.在一个实施例中,移动装置具有以下功能:弹道解算器;温度;压力;湿度;用户配置文件和射程卡配置文件。在一个实施例中,移动应用程序具有以下功能:弹道解算器;温度;压力;湿度;用户配置文件和r射程卡配置文件。
21.在一个实施例中,本公开涉及一种系统和方法,其允许用户在野外获得射程和弹道修正信息,并且经由包括诸如蓝牙的无线网络的网络向任何连接的测距仪、瞄准镜、外部装置(包括但不限于天气追踪器装置、导航装置和弹道解算器)、或电子个人装置(包括但不限于手表和小型平视(hud)显示器)发送该信息。由于低能耗蓝牙通信仅需要小型板载长寿命电池供电,因此不依赖外部蜂窝连接、电缆或外部电源。
22.本文所公开的装置、系统和方法的一个优点是用户可以使用具有移动应用程序的移动装置来选择要在所有装置上使用得弹道解算器,并且降低开发和许可成本。传统上,弹道解算器被集成到诸如测距仪、瞄准镜等的枪械配件中。这些装置中利用的弹道解算器的选择取决于供应商/工厂与弹道解算器制造商的关系和联盟。
23.在一个实施例中,弹道中心紧凑并且可以容易地固定到钥匙链、枪械或任何蓝牙连接的枪械装置,包括但不限于瞄准镜、测距仪、外部装置和个人装置显示装置。在一个实施例中,由于存在防水、抗冲击的保护壳或覆盖物,弹道中心可以经受恶劣的环境条件。可以经由与具有移动应用程序的移动装置的通信,将枪械配置文件和子弹配置文件预先加载到弹道中心。
24.在一个实施例中,弹道中心用作独立弹道计算器,而无需连接到外部移动装置/移动应用程序。在一个实施例中,弹道中心具有集成的环境传感器,其允许装置捕获信息,信息包括但不限于环境信息、温度、压力和湿度。弹道中心仅需要到枪械配件(瞄准镜、测距仪)和个人显示装置的连接蓝牙,包括但不限于智能手表、智能电话、智能手腕装置,以及根据需要的包括但不限于天气追踪器装置和导航装置的外部工业标准环境仪表,以接收必要的信息来计算弹道解决方案。然后,弹道解决方案连同测距信息可以被回送到任何连接的枪械配件。
25.在一个实施例中,然后可以在观察光学镜目镜和测距仪显示器中显示射程和弹道修正。用户无需将视线从目标移开或者离开瞄准镜,即可获得精准、实时的射程和弹道修正信息。
26.在一个实施例中,本公开涉及一种方法,包括:使用移动装置上的第一移动应用程序选择第一弹道解算器;将所选择的第一弹道解算器从移动装置传送到弹道中心;使用移动装置从所述弹道中心移除所选择的第一弹道解算器;使用移动装置上的第一或第二移动应用程序选择第二弹道解算器,并将所选择的第二弹道解算器从移动装置传送到弹道中心。
27.在一个实施例中,该方法进一步包括从测距仪向弹道中心传送射程,其中,弹道中心使用该射程计算弹道解决方案。
28.在另一实施例中,该方法进一步包括使用弹道中心计算弹道解决方案。在另一实
施例中,该方法进一步包括基于来自测距仪的射程,使用弹道中心计算弹道解决方案。
29.在一个实施例中,该方法进一步包括从弹道中心向测距仪和/或观察光学镜和/或天气追踪器装置和/或导航装置和/或外部装置和/或移动装置传送弹道解决方案。
30.在一个实施例中,本公开涉及一种方法,包括从测距仪向弹道中心传送射程,使用弹道中心的弹道解算器计算弹道解决方案,并向测距仪和/或观察光学镜和/或天气追踪器装置和/或导航装置和/或外部装置和/或移动装置传送弹道解决方案。
31.在一个实施例中,弹道中心与测距仪通过独立于互联网或蜂窝连接的平台通信。在一个实施例中,弹道中心包含或封装于挂扣中。
32.在另一实施例中,方法进一步包括从外部装置或弹道中心传送环境条件或参数。
33.在另一实施例中,方法进一步包括从导航单元向弹道中心传送地理条件或坐标。
34.在一个实施例中,本公开涉及一种系统,其包括测距仪,测距仪具有内存单元和通信协议,内存单元带有两个以上的处于非激活状态或锁定状态的弹道计算器,并且通信协议被配置为与移动装置通信,移动装置被配置为允许用户从测距仪的内存单元激活或解锁弹道计算器。
35.在一个实施例中,本公开涉及一种系统,其包括测距仪,测距仪具有内存单元和通信协议,内存单元带有两个以上的处于非激活或锁定状态的弹道计算器,并且通信协议被配置为与弹道中心通信,弹道中心被配置为允许用户从测距仪的内存单元激活或解锁弹道计算器。
附图说明
36.图1是本文公开的代表性系统的图,其描绘了与一个以上的附加装置通信的弹道中心。
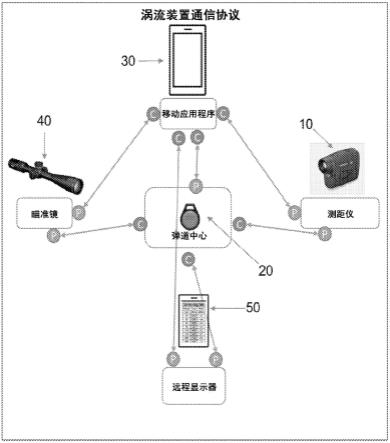
37.图2是本文公开的代表性系统,其描绘了用来获取距离的测距系统、具有用户选择的用于提供弹道解决方案的弹道解算器的弹道中心、以及用于显示弹道解决方案的选项。“c”代表两个以上的装置之间的通信,并且“p”代表可以在特定装置上发生的处理。
38.图3a是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘。
39.图3b是被配置为与具有带有弹道解算器的移动应用程序的移动装置通信的激光测距仪的代表性描绘。
40.图3c是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,弹道解算器被配置为与具有一个以上的移动应用程序的移动装置通信。
41.图4a是被配置为从具有用户选择的弹道解算器的弹道中心接收信息的激光测距仪的代表性描绘。弹道中心被配置为计算弹道解决方案并且向激光测距仪传送解决方案。
42.图4b是被配置为从具有带有弹道解算器的移动应用程序的移动装置接收信息的激光测距仪的代表性描绘。移动应用程序被配置为计算弹道解决方案并且向激光测距仪传送弹道解决方案。
43.图4c是被配置为向弹道中心传送信息的移动装置的代表性描绘,其中弹道中心被配置为向激光测距仪传送弹道解决方案。弹道中心和/或移动装置可以用来计算弹道解决方案。
44.图5a是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,其中弹道中心计算弹道解决方案,并且将解决方案传送并显示到观察光学镜和或远程装置。
45.图5b是被配置为与具有带有弹道解算器的移动应用程序的移动装置通信的激光测距仪的代表性描绘,其中移动应用程序计算弹道解决方案并且将弹道解决方案传送并显示到观察光学镜和/或远程装置。
46.图5c是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,弹道中心被配置为与具有一个以上的移动应用程序的移动装置通信,其中移动装置将弹道解决方案传送并显示到观察光学镜和/或外部装置。
47.图6a是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,其中弹道中心被配置为与天气追踪器装置通信,天气追踪器装置包括但不限于如图所示的茶隼(kestrel)。
48.图6b是被配置为与具有带有弹道解算器的移动应用程序的移动装置通信的激光测距仪的代表性描绘,其中移动应用程序与天气追踪器装置通信,天气追踪器装置包括但不限于如图所示的茶隼。
49.图6c是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,弹道中心被配置为与具有一个以上的移动应用程序的移动装置通信,其中移动装置与天气追踪器装置通信,天气追踪器装置包括但不限于如图所示的茶隼。
50.图7a是诸如茶隼的天气追踪器装置的代表性描绘,其被配置为与具有用户选择的弹道解算器的弹道中心通信以计算弹道解决方案。弹道中心被配置为向激光测距仪传送弹道解决方案。
51.图7b是诸如茶隼的天气追踪器装置的代表性描绘,其被配置为与具有弹道解算器的移动装置通信以计算弹道解决方案。移动装置被配置为向激光测距仪传送弹道解决方案。
52.图7c是诸如茶隼的天气追踪器装置的代表性描绘,其被配置为与移动装置通信。移动装置被配置为与弹道中心通信。移动装置和/或弹道中心可以计算向激光测距仪传送的弹道解决方案。
53.图8a是诸如天气流(weatherflow)的天气追踪器装置的代表性描绘,其被配置为与具有用户选择的弹道解算器的弹道中心通信以计算弹道解决方案。弹道中心被配置为向激光测距仪传送弹道解决方案。
54.图8b是诸如天气流的天气追踪器装置的代表性描绘,其被配置为与具有弹道解算器的移动装置通信以计算弹道解决方案。移动装置被配置为向激光测距仪传送弹道解决方案。
55.图8c是诸如天气流的天气追踪器装置的代表性描绘,其被配置为与移动装置通信。移动装置被配置为与弹道中心通信。移动装置和/或弹道中心可以计算向激光测距仪传送的弹道解决方案。
56.图9a是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,其中弹道中心被配置为与导航系统通信,导航系统包括但不限于佳明(garmin)。
57.图9b是被配置为与具有带有弹道解算器的移动应用程序的移动装置通信的激光测距仪的代表性描绘,其中移动应用程序与导航系统通信,导航系统包括但不限于佳明。
58.图9c是被配置为与具有用户选择的弹道解算器的弹道中心通信的激光测距仪的代表性描绘,弹道中心被配置为与具有一个以上的移动应用程序的移动装置通信,其中移动装置与导航系统通信,导航系统包括但不限于佳明。
59.图10是外部装置通信的代表性描绘。弹道中心被配置为与多个装置通信,多个装置被配置为接收、处理和发送信息。弹道中心可以被配置为与移动装置、天气追踪器装置和导航装置通信。
60.图11是被配置为与具有移动应用程序的移动装置、激光测距仪、观察光学镜以及一个以上的外部装置通信的弹道中心的代表性描绘。信息通过弹道中心和/或移动装置在激光测距仪、观察光学镜以及一个以上的外部装置之间传送。
61.定义
62.现在将在下文中参照附图更全面地描述本文公开的设备和方法,附图中示出了本公开的实施例。然而,本文公开的设备和方法可以以许多不同的形式实施,并且不应该被解释为限于本文阐述的实施例。相反,这些实施例被提供使得本公开是彻底且完整的,并且将本发明的范围完全转达给本领域技术人员。本文提供的所有附图和描绘都是代表性的而非限制性的。
63.在这个描述中,对“一个实施例”、“实施例”或“多个实施例”的引用意味着所引用的一个或多个特征包括在技术的至少一个实施例中。在这个描述中,对“一个实施例”、“实施例”或“多个实施例”的单独引用不一定表示同一实施例,并且也不是相互排斥的,除非如此陈述和/或除非本领域技术人员从描述显而易见。例如,在一个实施例中描述的特征、结构、行为等还可以包括在其他实施例中,但不是必须包括的。因此,本技术可以包括本文描述的实施例的各种组合和/或集成。
64.应当理解,当元件或层被称为“在另一元件或层上”、“连接到”或“联接到”另一元件或层时,它可以直接在另一元件或层上、连接到或联接到另一元件或层。或者,可以存在介于中间的元件或层。相反,当元件被称为“直接在另一元件或层上”、“直接连接到”或“直接联接到”另一元件或层时,不存在介于中间的元件或层。
65.相同标号在全文中表示相同元件。如本文所使用的,术语“和/或”包括一个以上相关所列项的任何或所有组合。
66.应当理解,尽管本文可以使用术语第一、第二等来描述各种元件、部件、区域和/或部分,但是这些元件、部件、区域和/或部分不限受这些术语的限制。这些术语仅用于区分一个元件、部件、区域或部分与另一元件、部件、区域或部分。因此,在不脱离本公开的情况下,下面讨论的第一元件、部件、区域或部分可以被称为第二元件、部件、区域或部分。
67.为了便于描述,本文可以使用空间相对术语,诸如“下面”、“下方”、“下”、“上方”“上”等,以描述图中所示的一个元件或特征与另一元件或特征的关系。应当理解,除了图中所示的定向之外,空间相对术语旨在包括使用中或操作中的装置的不同定向。例如,如果图中的装置被翻转,则被描述为在其它元件或特征“下方”或“下面”的元件将被定向在其它元件或特征的“上方”。因此,示例性术语“下方”可以包括上方和下方的定向。装置可以以其它方式定向(旋转90
°
或在其它定向),并且相应地解释本文使用的空间相对描述符。
68.所有专利、专利申请和非专利文献参考文献都全文并入本文。
69.本公开中的数值范围是近似,因此除非另有说明,否则可包括该范围之外的值。数值范围包括来自并包括下限值和上限值的所有值,以一个单位为增量,只要在任何较低值和任何较高值之间存在至少两个单位的间隔。例如,如果组成的、物理的或其它性质(例如分子量,粘度等)为100至1,000,则它旨在明确列举所有的单个值(例如100,101,102等)和子范围(例如100至144,155至170,197至200等)。对于包含小于1的值的范围或包含大于1的小数的范围(例如,1.1,1.5等),一个单位视情况被视为0.0001,0.001,0.01或0.1。对于包含小于10的单个数字的范围(例如,1到5),通常认为一个单位是0.1。这些只是具体用途的例子,所列举的最低值和最高值之间的数值的所有可能组合应被认为在本公开中明确陈述。
70.本文中在诸如“a和/或b”之类的短语中使用的术语“和/或”旨在包括:a和b两者;a或b;a(单独);和b(单独)。同样,在诸如“a,b和/或c”的短语中使用的术语“和/或”旨在包含以下实施例中的每一个:a、b和c;a、b或c;a或c;a或b;b或c;a和c;a和b;b和c;a(单独);b(单独);和c(单独)。
71.术语“包括”、“包含”、“具有”及其派生词不旨在排除任何附加部件、步骤或过程的存在,无论其是否被具体公开。为了避免任何疑问,除非有相反的说明,否则通过使用术语“包含”要求保护的所有组合物可以包括任何额外的添加剂、助剂或化合物,无论是聚合的还是其它的。相反,术语“基本上由
…
组成”从任何随后叙述的范围中排除了任何其它部件、步骤或过程,除了那些对可操作性不重要的部件、步骤或过程。术语“由
…
组成”排除了没有具体描述或列出的任何部件、步骤或过程。除非另有说明,术语“或”是指单独列出的元件以及任何组合。单数的使用包括复数的使用,反之亦然。
72.如本文所使用的,弹道计算器用于将环境数据和目标信息转换成用于击中目标的轨迹修正。弹道计算器预测射弹的轨迹,并且用来补偿物理效应,以增加射弹到达预定目标的概率。术语“弹道计算器”、“弹道解算器”、“弹道应用程序”和“弹道引擎(ballistic engine)”可以互换使用。
73.如本文所使用的,弹道中心是用于网络中一个以上的装置的公共连接点,其中网络的装置提供用于计算或传送弹道解决方案的信息。在一个实施例中,弹道中心是可以存储一个以上的弹道计算器以提供弹道解决方案的装置。在一个实施例中,弹道中心与一个以上的测距仪通信。在另一实施例中,弹道中心与一个以上的观察光学镜通信。在一个实施例中,弹道中心具有一个以上的环境传感器。在一个实施例中,弹道中心被配置为与具有一个以上的移动应用程序的移动装置通信。在一个实施例中,弹道中心被配置为与一个以上的外部装置通信,外部装置包括但不限于天气追踪器装置、导航装置、智能装置、可穿戴装置和弹道解算器。
74.如本文所使用的,蓝牙是用于在短距离上发送固定和移动电子装置数据的开放无线技术标准。蓝牙于1994年推出,作为rs-232电缆的无线替代品。蓝牙4.0无线技术具有约为110码的覆盖范围。
75.如本文所使用的,“枪械”是便携式枪,是发射通常由爆炸力作用驱动的一个以上的射弹的筒装武器。如本文所使用的,术语“枪械”包括手枪、长枪、步枪、霰弹枪、卡宾枪、自动武器、半自动武器、机枪、子机枪、自动步枪和攻击步枪
76.如本文所使用的,“挂扣”指的是可以封装弹道中心的小型无线装置。在一个实施例中,挂扣是气密和防水的。术语“弹道挂扣”和“挂扣”可以互换使用。
77.如本文所使用的,“目标”是被选择作为射弹目标的人、动物或地方。合适的动物目标的非限制性示例包括诸如鹿、鸭、火鸡和野鸡的狩猎动物。
78.如本文所用,术语“观察光学镜”是指射击者或观察者用来选择、识别或监视目标的设备。“观察光学镜”可以依赖于目标的视觉观察,或者例如,依赖于红外(ir)成像、紫外(uv)成像、雷达成像、热成像、微波或磁成像,包括x射线、伽马射线、同位素和粒子辐射的辐射,夜视,包括超声、声脉冲、声纳、地震振动、磁共振的振动接收器,重力感受器,包括无线电波的广播频率,电视和蜂窝接收器,或目标的其它图像。通过“观察光学镜”装置呈现给射击者的目标图像可以是未改变的,或者其可以例如通过放大、扩大、减去、叠加、过滤、稳定、模板匹配或其它手段来增强。由“观察光学镜”选择、识别或监视的目标可以在射击者的视线内,或者与射击者的视线相切,或者当目标获取装置向射击者呈现聚焦的目标图像时,射击者的视线可能被阻挡。由“观察光学镜”获取的目标的图像可以是例如模拟的或数字的,并且通过例如视频、物理线缆或线、ir、无线电波、蜂窝连接、激光脉冲、光学的、802.1lb或使用例如诸如html、sml、soap、x.25、sna等协议的其它无线传输、bluetooth
tm
、串行、usb或其它合适的图像分发方法而在一个以上射击者和观察者的网络内共享、存储、存档或传输。术语“观察光学镜”可与“光学瞄准器”互换使用。
79.如本文所使用的,术语“射击者”适用于进行射击的操作者或与进行射击的操作者合作观察射击的个体。
80.如本文所使用的,天气追踪器装置是用于测量一个以上的环境条件的任何装置。在一个实施例中,天气追踪器装置可以测量或感测海拔高度(气压的);大气压力;罗盘方向;侧风;密度高度;露点温度;逆风/顺风;热应力指数;相对湿度;站压(绝对压力);温度;湿球温度(湿度测定的);风寒;和风速/空速。
具体实施方式
81.在一个实施例中,本公开涉及一种装置,即“弹道中心”,用于存储一个以上的弹道计算器并提供弹道解决方案。在一个实施例中,弹道计算器由用户选择。在一个实施例中,移动装置被用来选择并向弹道中心传送弹道解算器。
82.在一个实施例中,本公开涉及一种系统,该系统包括移动装置和弹道中心,移动装置具有带有弹道解算器的移动应用程序并且被配置为与弹道中心通信,弹道中心被配置为计算弹道解决方案。在一个实施例中,本公开涉及一种系统,该系统包括移动装置,移动装置具有带有弹道解算器的移动应用程序并且被配置为向弹道中心传送弹道解算器。移动装置用来选择弹道解算器,其中移动装置向弹道中心传送选择的弹道解算器。弹道中心现在具有用户选择的弹道解算器,以用于任意数量的枪械和枪械配件。
83.在一个实施例中,存储在弹道中心中的弹道解算器可以通过访问移动装置并且选择新的弹道解算器来改变。弹道中心允许用户基于特定环境从各种弹道解算器进行选择。
84.在一个实施例中,弹道中心可以封装于装置中,该装置可以容易地固定到钥匙链、枪械或任何连接的枪械装置(瞄准镜、测距仪、个人装置、观察光学镜),并且由于其防水、抗冲击外壳,可承受恶劣的环境条件。由于枪械配置文件和子弹配置文件可以预先加载并存
储在弹道中心中,因此在无需连接到外部移动应用程序的情况下,弹道中心用作独立的弹道计算器。
85.在一个实施例中,挂扣可以存储并封装弹道中心。挂扣可以容易地固定到钥匙链、枪械或任何连接的枪械装置(瞄准镜、测距仪、个人装置、观察光学镜),并且由于其防水、抗冲击外壳,可承受恶劣的环境条件。由于枪械配置文件和子弹配置文件可以预先加载并存储在弹道中心中,因此在无需连接到外部移动应用程序的情况下,弹道中心用作独立的弹道计算器。
86.在一个实施例中,弹道中心经由无线网络与一个以上的装置通信,无线网络包括但不限于蓝牙网络。在一个实施例中,弹道中心不使用互联网来与一个以上的外部装置通信。在一个实施例中,弹道中心不使用蜂窝连接来与一个以上的外部装置通信。
87.在另一实施例中,弹道中心可以具有一个以上的集成环境传感器,以允许装置捕获信息,信息包括但不限于温度、压力和湿度。
88.在一个实施例中,弹道中心可以经由无线网络连接到枪械配件(瞄准镜、测距仪、个人装置、观察光学镜),无线网络包括但不限于蓝牙,并且如有需要,可以连接到外部工业标准环境仪表或装置,以接收所需信息来计算弹道解决方案。然后,弹道解决方案连同测距信息可以被传送到任何连接了蓝牙的枪械配件。
89.在一个实施例中,然后可以在观察光学镜的目镜和/或测距仪显示器中显示射程和弹道修正。用户无需将视线从目标移开或离开观察光学镜,就可以获得精准、实时的射程和弹道修正信息。
90.在一个实施例中,弹道中心是独立的装置,其向用户提供选择弹道解算器的能力。用户可以根据用户的需要将一个以上的弹道解算器加载到装置中。在一个实施例中,当被并入枪械配件装置中时,作为独立装置的弹道中心将不存在硬件或内存限制。由于不同的弹道解决方案在内存和处理要求方面差异较大,因此这将确保对于上传不同的弹道解决方案没有内存或硬件限制。
91.在一个实施例中,本公开涉及一种弹道中心和/或具有移动应用程序的移动装置,弹道中心将与枪械配件一起工作,以计算弹道解决方案并且向用户反向提供弹道解决方案,枪械配件包括但不限于安装的测距仪。在一个实施例中,单个移动应用程序将提供直观的流线型装置设置和数据输入。当移动应用程序不可用或者不能建立或保持互联网或蜂窝连接时,可以利用弹道中心。
92.在一个实施例中,本公开涉及封装有弹道中心的挂扣,弹道中心将与枪械配件一起工作,以计算弹道解决方案并且向用户反向提供弹道解决方案,枪械配件包括但不限于安装的测距仪。
93.在一个实施例中,本公开涉及具有带有移动应用程序的移动装置、弹道中心和测距仪的系统。在另一实施例中,系统进一步包括观察光学镜。在又一实施例中,系统进一步包括天气追踪器装置。在又一实施例中,系统进一步包括导航装置。在又一实施例中,系统进一步包括具有弹道解算器的装置。在一个实施例中,弹道中心封装于在挂扣中。
94.在一个实施例中,本公开涉及包括移动装置和/或弹道中心的系统,移动装置和/或弹道中心具有带有弹道解算器的两个以上的移动应用程序,移动装置和/或弹道中心被配置为向测距仪或观察光学镜传送弹道解算器。在一个实施例中,用户可以从移动装置或
计算机系统上的解算器列表中选择一个解算器,并且然后该解算器可以经由无线连接或经由有线连接在测距仪或观察光学镜上传送。移动装置或计算机系统上的弹道解算器将与激光测距仪或观察光学镜上的解算器相匹配。
95.在一个实施例中,本公开涉及具有两个以上的弹道计算器的测距仪,其中在给定时间点,仅一个弹道计算器被激活或可操作或被使用。在一个实施例中,本公开涉及一种系统,该系统包括测距仪和弹道中心和/或移动装置,测距仪具有两个以上的以停用或不可操作状态存储的弹道计算器,弹道中心和/或移动装置被配置为与测距仪通信并激活弹道计算器。
96.在一个实施例中,本公开涉及一种系统,该系统包括测距仪和弹道中心和/或移动装置,测距仪具有两个以上的弹道计算器,弹道中心和/或移动装置被配置为与测距仪通信并激活弹道计算器和停用剩余的弹道计算器。
97.在另一实施例中,可以在测距仪或观察光学镜上存储任意数量的弹道计算器。测距仪或观察光学镜被配置为与移动装置或计算机系统通信,从而允许用户选择弹道计算器以在测距仪或观察光学镜上操作。
98.在一个实施例中,测距仪或观察光学镜将与移动装置或计算系统或弹道中心共享通用通信协议。
99.在另一实施例中,可以在测距仪或观察光学镜中以锁定或非激活状态存储任意数量的弹道计算器。用户可以从移动装置或计算机系统上的解算器列表中选择一个解算器,并且然后该解算器通过从锁定(非激活状态)改变为解锁(激活状态)而能够在激光测距仪上使用。
100.可以在移动装置或计算机系统上存储任意数量的弹道计算器,包括1、2、3、4、5、6、7、8、9、10个及10个以上的弹道计算器。在一个实施例中,可以在激光测距仪或观察光学镜上存储任意数量的弹道计算器,包括1、2、3、4、5、6、7、8、9、10个及10个以上的弹道计算器。
101.图1是本文所描述的弹道中心的代表性描绘。弹道中心被配置为与具有一个以上的移动应用程序的一个以上的移动装置通信。弹道中心可以与任意数量的移动装置通信,包括但不限于1、2、3、4、5、6、7、8、9、10个及10个以上的移动装置。
102.在一个实施例中,移动装置向弹道中心传送弹道解算器。移动装置可以用于根据用户偏好加载和卸载弹道解算器。
103.在一个实施例中,弹道中心被配置为与运动光学镜通信,运动光学镜包括由涡流光学公司(vortex optics)制造的运动光学镜,包括但不限于双筒望远镜、单筒望远镜、射弹观测镜、瞄准镜。在一个实施例中,弹道中心可以与任意数量的运动光学镜通信,包括但不限于1、2、3、4、5、6、7、8、9、10个及10个以上的运动光学镜装置。
104.在一个实施例中,弹道中心还被配置为与天气追踪器装置通信,天气追踪器装置包括但不限于茶隼、天气流。弹道中心还被配置为与弹道解算器和测距仪通信。弹道中心被配置为向任意数量的装置发送信息并且从任意数量的装置接收信息,包括但不限于1、2、3、4、5、6、7、8、9、10个及10个以上的装置。
105.图2是本文所描述的弹道中心的一种非限制性应用的代表性描绘。从联接到枪械5的激光测距仪获取射程。射程被传送到具有用户选择的弹道解算器的弹道中心20。移动装置30上的移动应用程序被配置为向弹道中心20传送弹道解算器。弹道中心使用用户选择的
弹道解算器计算弹道解决方案。然后,弹道解决方案被传送到一个以上的装置和/或在一个以上的装置上显示。如图2所描绘的,可以在观察光学镜22、激光测距仪24和/或数字射程卡26上显示弹道解决方案,其中可以在可穿戴装置上或dope卡上显示射程卡26。
106.图3a是被配置为与弹道中心20通信的激光测距仪10的代表性描绘。图3b是被配置为与移动装置30通信的激光测距仪10的代表性描绘。图3c是被配置为与弹道中心20通信的激光测距仪10的代表性描绘,弹道中心20被配置为与移动装置30通信。测距仪10被配置为向弹道中心20传送信息,信息包括但不限于射程距离、用户配置文件、射程配置文件、设置、倾斜角、风速、风向和目标方位。
107.图4a是被配置为与激光测距仪10通信的弹道中心20的代表性描绘。图4b是被配置为与激光测距仪10通信的移动装置30的代表性描绘。图4c是被配置为与弹道中心20通信的移动装置30的代表性描绘,弹道中心20被配置为与激光测距仪10通信。弹道中心20和/或移动装置30被配置为向激光测距仪10传送信息,信息包括但不限于弹道解决方案、温度、风速、风向、用户设置、配置文件、压力和湿度。
108.图5a是与弹道中心20通信的激光测距仪10的代表性描绘,其中弹道中心20被配置为与一个以上的观察光学镜40和/或远程装置50通信。测距仪10被配置为向弹道中心20传送信息,信息包括但不限于射程距离、用户配置文件、射程配置文件、设置、倾斜角、风速、风向和目标方位。弹道中心20被配置为向观察光学镜40和/或远程装置50传送信息,信息包括但不限于弹道解决方案、温度、压力和湿度。
109.图5b是与移动装置30通信的激光测距仪10的代表性描绘,移动装置30包括但不限于移动电话。测距仪10被配置为向移动装置30传送信息,信息包括但不限于射程距离、用户配置文件、射程配置文件、设置、倾斜角、风速、风向和目标方位。移动装置30被配置为向观察光学镜40和/或附加装置50传送信息,信息包括但不限于弹道解决方案、温度、压力和湿度。
110.图5c是与弹道中心20通信的激光测距仪10的代表性描绘,弹道中心20与移动装置30通信。测距仪10被配置为向弹道中心20传送信息,信息包括但不限于射程距离、用户配置文件、射程配置文件、设置、倾斜角、风速、风向和目标方位。弹道中心20被配置为向移动装置30传送信息,信息包括但不限于弹道解决方案、温度、压力和湿度。移动装置30被配置为与观察光学镜40和/或相关的配件50通信。
111.图6a是激光测距仪10的代表性描绘,激光测距仪10被配置为与弹道中心20通信,弹道中心20被配置为与诸如茶隼的风和天气追踪器60通信。图6b是激光测距仪10的代表性描绘,激光测距仪10被配置为与移动装置30通信,移动装置30被配置为与诸如茶隼的风和天气追踪器60通信。图6c是激光测距仪10的代表性描绘,激光测距仪10被配置为与弹道中心20通信,弹道中心20被配置为与移动装置30通信,移动装置30被配置为诸如茶隼的风和天气追踪器60通信。
112.在图6a-6c中,激光测距仪10被配置为向弹道中心20和/或移动装置30传送信息,信息包括但不限于射程、倾斜角、目标方位、用户配置文件、射程配置文件设置、风速和风向。弹道中心20和/或移动装置30被配置为向风和天气追踪器装置60传送信息,信息包括但不限于射程、倾斜角和目标方位。数据可以源自激光测距仪10。数据可以源自弹道中心20和/或移动装置30。在一个实施例中,所有数据源自激光测距仪10。在又一实施例中,所有数
据源自弹道中心20和/或移动装置30。
113.图7a是诸如茶隼的风和天气追踪器60的代表性描绘,其被配置为与弹道中心20通信,弹道中心20被配置为与激光测距仪10通信。图7b是诸如茶隼的风和天气追踪器60的代表性描绘,其被配置为与移动装置30通信,移动装置30被配置为与激光测距仪10通信。图7c是诸如茶隼的风和天气追踪器60的代表性描绘,其被配置为与移动装置30通信,移动装置30被配置为与弹道中心20通信,弹道中心20被配置为与激光测距仪10通信。
114.在图7a-7c中,风和天气追踪器装置60被配置为向弹道中心20和/或移动装置30传送信息,信息包括但不限于温度、压力、湿度、风速和风向。在一个实施例中,如果天气追踪器装置与被配置为计算弹道解决方案的独立装置通信,则风和天气追踪器装置60可以向弹道中心20和/或移动装置30提供弹道解决方案。
115.弹道中心20和/或移动装置30被配置为向激光测距仪10传送信息,信息包括但不限于弹道解决方案、弹道配置文件、射程卡配置文件、设置、温度、压力、湿度、风速和风向。
116.在图7c中,可以由移动装置30计算弹道解决方案,并且将弹道解决方案传送到弹道中心20,弹道中心20向激光测距仪10传送弹道解决方案。在另一实施例中,弹道中心20可以计算弹道解决方案并且与激光测距仪10通信。在又一实施例中,移动装置30和弹道中心20二者都可以计算弹道解决方案。在一个实施例中,移动装置30和弹道中心20采用相同的弹道解算器。在又一实施例中,移动装置30和弹道中心20采用不同的弹道解算器。
117.在一个实施例中,移动装置30向弹道中心20传送弹道解决方案,弹道中心20向激光测距仪10传送弹道解决方案。
118.图8a是示为天气流装置70的天气追踪器装置的代表性描绘,其被配置为与弹道中心20通信,弹道中心20被配置为与激光测距仪10通信。图8b是示为天气流装置70的天气追踪器装置的代表性描绘,其被配置为与移动装置30通信,移动装置30被配置为与激光测距仪10通信。图8c是示为天气流装置70的天气追踪器装置的代表性描绘,其被配置为与移动装置30通信,移动装置30被配置为与弹道中心20通信,弹道中心20被配置为与激光测距仪10通信。
119.在图8a-8c中,天气追踪器装置70被配置为向弹道中心20和/或移动装置30传送信息,信息包括但不限于风速和风向。弹道中心20和/或移动装置30被配置为向激光测距仪传送信息,信息包括但不限于弹道解决方案、弹道配置文件、射程卡配置文件、设置、温度、压力、湿度、风速和风向。
120.图9a是激光测距仪10的代表性描绘,激光测距仪10被配置为与弹道中心20通信,弹道中心20被配置为与诸如佳明fortrex的导航系统80通信。图9b是激光测距仪10的代表性描绘,激光测距仪10被配置为与移动装置30通信,移动装置30被配置为诸如佳明fortrex的导航系统80通信。图9c是激光测距仪10的代表性描绘,激光测距仪10被配置为与弹道中心20通信,弹道中心20被配置为与移动装置30通信,移动装置30被配置为与诸如佳明fortrex的导航系统80通信。
121.在图9a-9c中,激光测距仪10被配置为向弹道中心20和/或移动装置30传送信息,信息包括但不限于射程、倾斜角、目标方位、用户配置文件、弹道配置文件、射程配置文件设置、风速和风向。弹道中心20提供附加数据,附加数据包括但不限于弹道解决方案、温度、压力和湿度。弹道中心20被配置为向导航系统80传送信息,信息包括但不限于来自激光测距
仪的射程、来自激光测距仪的倾斜角、来自激光测距仪的目标方位和射程配置文件。
122.图10是被配置为与一个以上的外部装置通信的弹道中心20的代表性非限制性描绘。弹道中心可以与任意数量的装置通信,包括但不限于1、2、3、4、5、6、7、8、9、10个及10个以上的装置。移动装置30用于管理和选择一个以上的外部装置的设置。移动装置30和弹道中心20用于管理外部装置之间的连接,并且授权一个以上的装置之间的通信。当不存在移动装置30或者无法确保到一个以上的装置的连接时,弹道中心20是与一个以上的装置通信的中心点。
123.如图10所示,使用如本文所描述的弹道中心20可以形成连接的网络。弹道中心20被配置为与移动装置30、示出为茶隼60的天气追踪器装置、示出为天气流70的第二天气追踪器装置以及示为佳明80的导航装置通信。弹道中心20可以从第一装置接收信息,处理所接收的信息,并且与第二装置通信。
124.通过非限制性示例,天气流70被配置为向弹道中心20提供信息。弹道中心20处理所接收的天气流信息,并且向茶隼60提供新的信息。茶隼60还被配置为向弹道中心20传送信息,弹道中心20将接收和处理茶隼信息。弹道中心20可以向佳明80传送处理过的茶隼信息。同样,佳明80被配置为向弹道中心20传送信息。
125.弹道中心被配置为发送和接收信息。在一个实施例中,弹道中心可以从第一装置接收信息,处理所接收的信息,并且将新的信息送回到第一装置。
126.在另一实施例中,弹道中心可以从第一装置接收信息,并且向第二装置发送信息。在又一实施例中,弹道中心可以从第一装置接收信息,处理所接收的信息,并向第二装置发送处理过的信息。
127.图11是弹道中心20的代表性非限制性描绘,弹道中心20被配置为与观察光学镜40和激光测距仪10通信。具有移动应用程序的移动装置30可以用来确定一个以上的连接的装置的设置和配置。用户可以使用具有移动应用程序的移动装置30来选择弹道解算器。移动装置30被配置为向弹道中心20传送弹道解算器。
128.弹道中心20和移动装置30可以用来管理一个以上的连接的装置,并且允许连接的装置通信。当不存在移动装置时,弹道中心20是中央装置,并且被配置为基于由移动装置的移动应用程序提供的装置的最后设置或配置来管理一个以上的连接的装置。
129.如图11所示,弹道中心20被配置为从激光测距仪10接收信息,信息包括但不限于到目标的距离。弹道中心20可以处理从激光测距仪10接收的距离,并且向瞄准镜40提供弹道解决方案。弹道中心20还被配置为从远程显示器50接收和处理信息,远程显示器50还被配置为从弹道中心20接收信息。
130.通过弹道中心和/或移动装置,信息在激光测距仪、观察光学镜和一个以上的外部装置之间传送。在一个实施例中,激光测距仪和观察光学镜彼此不直接通信。相反,激光测距仪被配置为向弹道中心和/或移动装置提供信息,然后弹道中心和/或移动装置向观察光学镜传送信息。在弹道中心和/或移动装置接收到信息时,弹道中心和/或移动装置可以传送信息,或者弹道中心和/或移动装置可以首先处理信息,并且然后将信息传递到观察光学镜。
131.移动装置/弹道中心
132.在一个实施例中,弹道中心包括弹道解算器。在一个实施例中,弹道中心包括用户
选择的弹道解算器。在一个实施例中,具有移动应用程序的移动装置包括弹道解算器。在一个实施例中,弹道中心和/或移动装置将包括以下附加功能:弹道解算器、温度、压力、湿度、用户配置文件和射程卡配置文件。
133.在一个实施例中,移动装置上的移动应用程序将是数据输入、用户设置和装置管理的主要模式,并将包括装置配对;装置设置;枪械设置的选择;子弹设置和库的选择;阻力模型的选择:选择和管理用户配置文件(保存的枪械、子弹和阻力模型配置文件);查看装置环境传感器和风向捕获;罗盘校准;单个和多个弹道显示;射程卡配置文件的选择和管理;和目标参数的功能。
134.在一个实施例中,弹道中心和/或移动装置将使用射程数据和用户配置文件,基于从弹道中心的机载环境传感器或外部风速计传感器的读数,或者从移动装置或天气追踪器装置获得的环境数据,来计算弹道解决方案。
135.在一个实施例中,弹道中心封装于在挂扣中。在一个实施例中,挂扣尺寸紧凑、气密且防水。挂扣可以容易地固定到链条、钥匙链、枪械、皮带、背包、鞋子、帽子、衬衫、裤子或任意其他容易获得的设备。
136.在一个实施例中,带有弹道中心的挂扣可以与多个枪械和多个观察光学镜一起使用。挂扣提供了将弹道解算器与多个枪械和观察光学镜一起使用的方便的方法。
137.在一个实施例中,挂扣具有5英寸以下的高度。在另一实施例中,挂扣具有4英寸以下的高度。在另一实施例中,挂扣具有3英寸以下的高度。在另一实施例中,挂扣具有2英寸以下的高度。在另一实施例中,挂扣具有1.5英寸以下的高度。在一个实施例中,挂扣具有1.2英寸到2.2英寸的高度。在又一实施例中,挂扣具有1.6英寸到3英寸的高度。
138.在一个实施例中,挂扣具有5英寸以下的宽度。在一个实施例中,挂扣具有4英寸以下的宽度。在一个实施例中,挂扣具有3英寸以下的宽度。在一个实施例中,挂扣具有2英寸以下的宽度。在一个实施例中,挂扣具有1.5英寸以下的宽度。在一个实施例中,挂扣具有0.8英寸到3.2英寸的宽度。
139.在一个实施例中,挂扣具有1.2英寸到2.5英寸的宽度。在一个实施例中,挂扣具有1.3英寸到2.2英寸的宽度。
140.在一个实施例中,挂扣具有1英寸以下的深度。在一个实施例中,挂扣具有0.5英寸以下的深度。在一个实施例中,挂扣具有0.4英寸以下的深度。在一个实施例中,挂扣具有0.3英寸以下的深度。在一个实施例中,挂扣具有0.2英寸以下的深度。在一个实施例中,挂扣具有1英寸到2英寸的深度。在一个实施例中,挂扣具有0.4英寸到1.3英寸的深度。在一个实施例中,挂扣具有0.2英寸到0.8英寸的深度。
141.在一个实施例中,具有移动应用程序的移动装置包括设置和管理配置文件,并且向诸如测距仪和观察光学镜的装置发送配置文件和数据。
142.测距仪
143.在一个实施例中,当经由蓝牙技术连接到移动电话应用程序和/或弹道中心时,激光测距仪将具有发送和接收数据的能力。激光测距仪将能够发送以下数据:射击角度;射击方位(shot bearing);到目标的射程;风模式;风速;风向;设置;用户配置文件;和射程配置文件。
144.在一个实施例中,激光测距仪将被配置为接收以下数据:弹道解决方案;用户配置
文件(枪、子弹和曲线);射程配置文件;风速;风向;温度数据;压力数据;相对湿度数据;和设置。
145.在一个实施例中,测距仪可具有带电子、显示和蓝牙通信功能的905nm激光测距仪模块。在一个实施例中,激光测距仪可以具有将允许测距仪与一个以上连接的装置、弹道中心、和移动装置以及标准工业装置(茶隼、天气流、佳明)双向通信的通信协议。在一个实施例中,测距仪将并入蓝牙技术(ble 652nordic nrf 52芯片组)以与外部装置通信。
146.在一个实施例中,激光测距仪将具有测距性能以满足远程射击的需要,具有最大射程5000码、对树2500码,对鹿2000码的能力。
147.在一个实施例中,测距仪模块将具有45mm到48mm宽、20mm到22mm高、50mm到55mm长的尺寸目标。在一个实施例中,测距仪模块将不会超过4盎司。
148.在一个实施例中,激光测距仪将具有ⅰ类635nm红色集成可见对准激光。用户将利用激光来确保测距仪与步枪的调准(调零)。需要能够在100码看到激光,最小50码。
149.在另一实施例中,激光测距仪将具有1.3英寸的oled显示器,可以根据安装方向旋转显示的信息。
150.在一个实施例中,激光测距仪将与弹道中心或移动装置通信。测距仪将向弹道中心/移动电话发送装置数据(射程、配置文件、风等)。弹道中心/移动电话将提供附加数据(温度、压力等),并且基于测距仪数据计算弹道解决方案。弹道解决方案将被回送到测距仪,并且与测距仪数据一起在测距仪显示器上可见。
151.在一个实施例中,激光测距仪将具有风向捕获算法。
152.在一个实施例中,激光测距仪将具有单和多测量模式。在弹道模式关闭的情况下,单测量模式将计算并显示单个射程。多模式(射程卡)将允许用户测量、显示和存储多个距离。在弹道模式开启的情况下,两种测量模式将向弹道中心/移动装置发送射程数据,其中将利用存储的用户配置文件(子弹和步枪配置文件)计算弹道解决方案。一旦计算出弹道解决方案,数据将被回送到测距仪,并且测距仪将显示射程、竖直和水平保持计算。在多测量模式下,用户可以依次获取和存储多达10个目标。各个测量将显示(从弹道中心的弹道解算器或移动装置发送的)射程、竖直和水平保持计算。
153.在一个实施例中,激光测距仪在测距仪外壳上具有集成操作按钮。这是5按钮操作板,其允许用户浏览测距仪菜单和设置。
154.在一个实施例中,激光测距仪具有固定到枪械的远程操作按钮。按钮将被拴到测距仪,并且可以固定到用户定义的步枪上的点。通过数字射程卡进行滚动和选择,这些按钮将允许用户远程控制单个或多个目标的测距。
155.通信部件
156.在一个实施例中,弹道中心将通过ble(蓝牙)4.0或更高版本的通信与一个以上的装置通信。ble将作为枪械装置、其他工业装置和仪表以及移动装置之间的标准通信。
157.枪械装置
158.在一个实施例中,一个以上的枪械装置可以与弹道中心通信。枪械装置包括但不限于测距仪、瞄准镜、双筒望远镜、单筒望远镜、射弹观测镜和数字涂料/射程卡。封装弹道中心的挂扣可以在一个以上的枪械装置之间互换使用。
159.工业标准装置
160.工业标准装置包括但不限于茶隼天气仪表(kestrel weather meter)、天气流仪表(weatherflow meters)以及佳明fortrex 701。为了实现易用性、有效性和与其他装置的集成,弹道中心/移动装置可以连接气象站(例如,茶隼或超声波风向和风速检测器)、gps(例如佳明)、夜视模块、热单元(例如fur)、测距仪和/或视频互联(video inter-link)。各个部件可以通过硬线、ir、蓝牙、微波、手动输入等直接连接到pda、计算机、电话或其他装置。
161.装置架构
162.在一个实施例中,装置架构将需要支持标准化的通信协议。测距仪将与弹道中心、移动装置、其他装置和外部工业装置(风速计等)通信。因此,通用的通信协议将确保可支持的平台。提供可以由其他装置和具有移动应用程序的移动装置使用的常见的装置输入/输出的集合将是有帮助的。
163.例如,常见的数据输出包括:到目标的射程;用户配置文件(步枪、子弹、曲线数据);射程配置文件(存储的射程卡);弹道解决方案;射击角度;射击方位;风模式;风速;风向;压力数据;温度数据;和相对湿度数据。
164.常见的数据输入的示例包括:用户配置文件(枪、子弹、曲线);射程配置文件;风速;风向;睡眠时间延迟;弹道解决方案;温度数据;压力数据;和相对湿度数据。
165.装置内存和存储要求
166.在一个实施例中,测距仪具有足够的处理能力和内存来支持蓝牙通信以及数据的导入和导出。这包括存储用户配置文件和射程配置文件的能力。装置将需要支持从弹道中心或移动装置导入和显示弹道解决方案的能力。
167.在一个实施例中,测距仪具有足够的处理能力和内存来支持两个以上的弹道计算器或弹道解算器。弹道解算器可以以锁定或非激活状态存储。
168.风速计集成
169.在一个实施例中,当经由蓝牙技术连接到风速计装置时,测距仪将具有发送和接收数据的能力。测距仪将能够向风速计装置发送以下数据:射击角度;射击方位;和到目标的射程。
170.在一个实施例中,测距仪能够从风速计接收以下数据:风速;风向;温度数据;压力数据;和相对湿度数据。
171.佳明集成
172.在一个实施例中,当经由蓝牙技术连接到佳明foretrex 701装置时,测距仪将具有发送数据的能力。测距仪将能够向佳明foretrex 701装置发送以下数据:射击角度;射击方位;到目标的射程;射程配置文件;温度数据;压力数据;和相对湿度数据。
173.代表性系统操作
174.现在描述系统操作的一个代表性非限制性示例。从关闭状态按下测量按钮将开启系统。安装了测距仪的枪械将具有两种主要的操作模式:射程模式(range)和弹道模式(bal)。将通过菜单选择模式。
175.如果处在bal模式,测距仪向弹道中心或具有移动应用程序的移动装置导出射程数据。测距仪导入并显示来自弹道中心和/或具有移动应用程序的移动装置的弹道解决方案。这是经由访问弹道解算器、环境传感器、存在在弹道中心和/或具有移动应用程序的移
动装置中的武器配置文件和射程配置文件来实现的。
176.如果处在range模式,则弹道计算被禁用。
177.按下并释放测量按钮将提供单个射程。双击测量按钮将激活扫描模式,扫描模式将持续的对目标进行测距并且在屏幕上显示更新的射程;一旦再次按下测量按钮,将显示最后的射程。
178.一旦确定并返回了弹道解决方案,按下并释放上或下按钮将在四个值之间循环:与解决方案相关的捕获的温度、压力、航向和风。按下和释放左或右按钮将减少或增加一个单位的风值,并且系统将计算新的弹道解决方案。如果同时按下左和右按钮,风速将等于零。
179.用户将具有从单(sng)测量模式和多(mlt)测量模式这两种显示模式中选择一种的能力。
180.单测量模式(sng)允许用户测量单个目标。如果处在bal模式,来自弹道中心和/或具有移动应用程序的移动装置的射程、竖直和水平保持计算将与射程数据一起显示。
181.多测量模式(mlt)允许用户依次获取并存储多达10个目标。在这种模式下,用户查看存储的目标射程列表,并且如果处在bal模式,则查看附带的竖直和水平保持数据。测量目标显示单个射程数据。如果用户希望将其添加到射程列表中,就按下右箭头。射程数据被发送到弹道中心和/或移动装置,并且弹道修正被返回到测距仪。如果没有正确捕获到射程,用户可以重新对目标进行测距,而无需将先前的数据添加到射程列表。如果用户不希望将射程添加到射程列表,左箭头将返回到射程列表屏幕。在返回到射程列表时,以是或否提示向用户提示保存射程列表。用户可以利用上和下箭头来选择是或否。如果选择是,则用户将被提示输入射程卡配置文件标题。一旦进入射程列表画面,用户可以利用上和下箭头突出显示列表中的射程。右箭头突出显示显示的列表中的顶部范围,以允许上和下在射程卡中重新定位所选条目。按下测量按钮,将突出显示的范围保存在所选位置。按下左键以提示保存射程列表,并提示是或否。用户可以利用上和下箭头来选择是或否。如果选择是,用户将被提示输入射程卡配置文件标题。存储的数据包括射程、倾斜度、方位、水平和竖直校正。射程卡配置文件可以被发送到弹道中心、移动装置或任何连接的装置。利用移动装置,用户可以保存射程卡数据作为射程卡配置文件。射程卡配置文件可以从弹道中心和/或移动装置上传到任何适用的装置。
182.当测距仪启用蓝牙时,其可以连接到弹道中心、具有移动应用程序的智能手机、其他装置或其他启用蓝牙的装置。如果测距仪连接到显示器单元,测距仪将向显示器发送完整的弹道解决方案,以显示给用户。印刷电路板组件应当包括允许通过蓝牙模块刷新(re-flash)微控制器的能力。同样,蓝牙模块固件应该能够很好地更新。
183.按下测量按钮并保持5秒将进入菜单。使用箭头和输入按钮允许用户浏览和选择设置。
184.操作菜单设置包括但不限于:
185.a.测距模式包括range(无弹道)和bal(弹道)
186.b.测量模式包括single和multiple
187.c.风捕获模式(wind capture mode)包括fcw(全侧风)和wbc(风向捕获)
188.d.武器配置文件将包括一个以上的枪械配置文件的存储和输入
189.e.射程配置文件将包括一个以上的射程配置文件的存储和输入
190.设置菜单设置包括但不限于显示亮度、目标模式、诸如英制码、华氏、水银、英里/小时、公制米、摄氏温度、毫巴、米/秒的单位,和指南针。
191.连接菜单设置包括导入数据(关闭;茶隼;天气流);导出数据(关闭;茶隼和佳明)。
192.菜单允许用户查看所有连接的装置(弹道中心、瞄准镜、双目镜、数字射程卡、射弹观测镜、电话、茶隼、天气流、佳明fortrex)。如果期望或需要,菜单还将允许用户断开装置。
193.菜单还允许用户查看先前连接的装置。内存中的装置类别显示所有装置连接历史记录以及由蓝牙识别的但未连接的装置。该列表中的所有装置当前都没有连接。菜单允许用户连接和断开装置。
194.弹道模式下的风速调节
195.有两种风模式可供用户选择,全侧风(fcw)和风向捕获(wbc)。
196.fcw模式是默认模式,并且在这种风模式下,左和右按钮用来以显示的相应的箭头,以1mph或m/s的增量增加/减小风速。例如,如果按下左按钮两次,风速将增加2个单位,并且显示的对应的左箭头。然后,如果按下右按钮一次,风将减小1个单位,左箭头将保持显示。如果在fc模式下按下左和右按钮,所有风向值将被视为来自相对于用户90度或270度的方向。如果测距仪超时,单元将保持在fc模式,并且保留用户最后输入的风速和方向。在fc模式下,如果同时按下左和右按钮风速将归零,并且单元将闪烁3次新的零值。
197.用户通过操作菜单的选择进入风向捕获模式。在wbc模式下,解算器将使用捕获的相对于射击方向的风向来制定所有弹道计算。在返回主显示后,风向(方向)和风向箭头将闪烁三次。当处在wbc模式时,左/右风向箭头都亮,以指示风向捕获模式被激活。通过按下左和右按钮,风速一次更新一个单位。左和右按钮将不会改变风向。将显示风向
‑‑‑‑°
直到输入一个方向,此时将显示方向(0-360
°
)。为了捕获风向,将单元指向风中,然后按下风按钮。如果用户想要捕获不同的方向,将测距仪指向风的方向并且再次按下风按钮。这将以新捕获的方向替换先前捕获的风向。如果测距仪超时,该单元将保持在wbc模式,并且保留最后捕获的方向和速度。
198.通过以下段落进一步描述本文公开的系统、装置和方法:
199.1.一种装置,包括用于提供弹道解决方案的一个以上的弹道计算器,并且被配置为与独立且不同的测距仪通信。
200.2.一种装置,包括用于提供弹道解决方案的一个以上的弹道计算器、一个以上的环境传感器,并且被配置为与测距仪通信,其中装置没有被集成到测距仪、枪械或观察光学镜中。
201.3.一种装置,包括用于提供弹道解决方案的一个以上的弹道计算器,以及被配置为与移动装置和测距仪通信的处理器/控制模块,其中装置没有被集成到测距仪、枪械或观察光学镜中。
202.4.一种装置,包括用于提供解决方案的弹道计算器的软件,以及被配置为与移动装置和测距仪通信的处理器/控制模块,其中用户通过移动装置选择弹道计算器的软件。
203.5.一种系统,其包括测距仪、弹道中心和观察光学镜,测距仪被配置为确定到目标的距离,弹道中心具有一个以上的用于使用由测距仪提供的距离来确定弹道解决方案的弹道计算器,观察光学镜具有被配置为从弹道中心接收弹道解决方案的处理器和用于显示弹
道解决方案的显示器。
204.6.一种系统,包括测距仪、弹道中心和处理器,测距仪被配置为确定到目标的距离,弹道中心具有用于使用测距仪提供的距离来确定弹道解决方案的弹道计算器,处理器被配置为向测距仪传送弹道解决方案。
205.7.一种系统,包括测距仪、弹道中心和移动装置,测距仪被配置为确定到目标的距离,弹道中心具有用于使用测距仪提供的距离来确定弹道解决方案的弹道计算器,移动装置被配置为向弹道中心传送选择的弹道计算器。
206.8.根据前述权利要求中任一项所述的装置,其中,所述装置没有被集成到测距仪、枪械或观察光学镜中。
207.9.根据前述权利要求中任一项所述的装置,其中,所述装置可以夹在测距仪、枪械或观察光学镜上。
208.10.一种测距仪,包括内存存储单元和通信协议,内存存储单元具有两个以上的弹道解算器,通信协议被配置为与移动装置通信,移动装置被配置为允许用户从内存存储单元选择弹道解算器。
209.11.一种测距仪,包括内存存储单元和通信协议,内存存储单元具有两个以上的处于非激活或锁定状态的弹道解算器,通信协议被配置为与移动装置通信,移动装置被配置为允许用户从内存存储单元激活或解锁弹道解算器。
210.12.本文所描述的移动装置具有2到100个弹道解算器。
211.13.本文所描述的激光测距仪具有2到100个弹道解算器。
212.14.本文所描述的计算机系统具有2到100个弹道解算器
213.具体而言,本公开不限于本文包含的实施例和图示,而是包括这些实施例的变型形式,包括实施例的部分内容和不同实施例的元素组合,这些内容均在以下权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1