一种小型高机动导弹气动布局
1.本发明属于导弹设计领域,具体涉及一种小型高机动导弹气动布局。
背景技术:
2.随着国防技术的发展,导弹的小型化越来越受到重视,各国陆续开始研发适用于单兵作战等的微小型制导弹药。同时,对无人机、小型飞机、炮弹等目标的防空需求,对导弹的低成本小型化以及机动性能提出了较高的要求。
3.导弹的机动主要依靠改变作用于其上的力及力矩的大小和方向实现。一种实现方式是通过矢量发动机实现直接力控制,但该方法存在力大小难以控制、系统体积大、无法长时间工作的缺点。另一种方法是通过操纵气动舵面的偏转来改变作用于导弹的气动力和力矩。通过合理设计导弹的气动舵面也即导弹的气动布局即可实现所要求的高机动特性。
技术实现要素:
4.要解决的技术问题:
5.为了避免现有技术的不足之处,本发明提出一种小型高机动导弹气动布局,通过在导弹外周面成
“ⅰ”
字型分布的二级鸭翼,降低鸭式导弹的诱导滚转影响,并在此基础上解决滚转控制通道与俯仰、偏航控制通道的耦合问题,降低导弹系统设计难度。
6.本发明的技术方案是:一种小型高机动导弹气动布局,包括导弹头部、弹身、一级鸭翼和尾翼,所述导弹头部为旋成体外形,同轴安装于导弹的前端;所述弹身为圆柱体结构;四个一级鸭翼沿周向均布于弹身外周面靠近头部的位置,并呈
“×”
字型;四个尾翼沿周向均布于弹身尾端的外周面,并呈
“×”
字型;其特征在于:还包括两个二级鸭翼,两个二级鸭翼以弹身的中心轴对称、设置于弹身外周面靠近一级鸭翼的位置,并分别位于弹身的正上方和正下方成
“ⅰ”
字型。
7.本发明的进一步技术方案是:所述一级鸭翼、二级鸭翼均为梯形或三角形平板翼结构,鸭翼的外边缘进行倒角处理。
8.本发明的进一步技术方案是:所述二级鸭翼沿导弹的轴向位于一级鸭翼后,与一级鸭翼距离为一级鸭翼展长的1~2倍。
9.本发明的进一步技术方案是:所述小型高机动导弹直径为40mm;所述导弹头部为旋成体结构,母线为抛物线,头部轴向长度为86mm,头部最大直径为40mm;所述弹身为圆柱形,轴向长度为578mm,弹身直径为40mm;
10.所述一级鸭翼的根弦长40mm,梢弦长20mm,半展长为30mm,翼面厚2mm,铰链位置距导弹头部顶点处196mm;翼根侧表面的对称中心有用于连接舵机输出轴的连接孔位,四个一级鸭翼翼面分别与四个独立的舵机输出轴连接;所述铰链即为舵机输出轴;
11.所述二级鸭翼的根弦长20mm,梢弦长10mm,半展长为20mm,翼面厚2mm,铰链距头部位置246mm;翼根侧表面的对称中心有用于连接舵机输出轴的连接孔位,2个翼面分别与2个独立的舵机输出轴连接;所述铰链即控制二级鸭翼的舵机输出轴。
12.所述尾翼为平板翼的根弦长70mm,梢弦长40mm,半展长为40mm,翼面厚2mm,尾翼后缘与导弹底部平齐,四个尾翼与弹身表面固接。
13.本发明的进一步技术方案是:所述的导弹头部为球形结构或抛物线结构。
14.本发明的进一步技术方案是:所述尾翼为梯形平板翼结构,尾翼边缘进行倒角处理;四个尾翼与四个一级鸭翼的布局相同、位置相对。
15.有益效果
16.本发明的有益效果在于:
17.1、二级鸭翼的控制效率更高,滚转控制效果好。
18.在相同的飞行条件及舵偏角情况下,相同大小的舵面面积,二级鸭翼构型产生的滚转控制力矩为常规鸭翼布局导弹产生滚转力矩的1.98倍。同时在实际应用中,对于导弹滚转控制力矩的要求较小,二级鸭翼的布局方案可以单独设计较小尺寸的滚转控制舵面,以达到相同甚至更好的滚转控制效果。例如在本设计中用于滚转控制的二级鸭翼进行单独设计时,其翼面积仅为原单级鸭翼导弹鸭翼面积的三分之一,同时由于导弹的滚转控制由二级鸭翼进行单独控制无需一级鸭翼的参与,使得控制系统设计更加简单高效,提高了控制系统的精度。
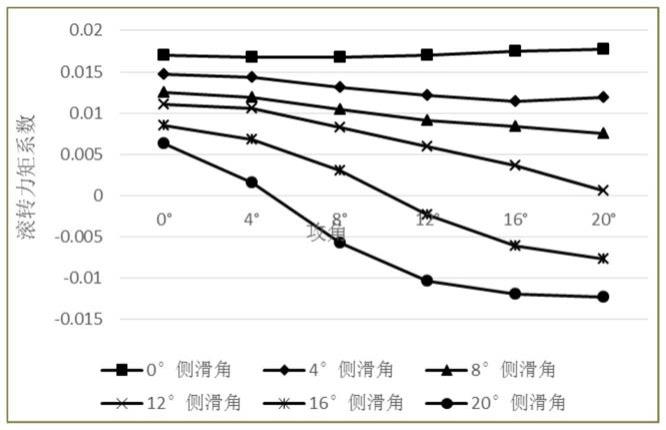
19.2、二级鸭翼产生的滚转控制力矩为近似线性变化的,控制系统设计简单。
20.如图3所示,在同一侧滑角下,二级鸭舵产生的滚转控制力矩系数相对攻角变化较为平稳。除去20
°
侧滑角状态的曲线,其他各条折线基本呈线性变化。由此可知在导弹纵向对称面内的二级鸭翼产生的滚转控制力矩对攻角的变化基本呈线性规律。
21.3、二级鸭翼设计使得滚转通道与另外两个通道解耦,简化了控制系统设计。
22.如图4、5所示,分别为无舵偏状态和二级鸭翼差动10
°
状态下,导弹俯仰力矩系数随侧滑角和攻角的变化情况。如图6、7所示,分别为对应的偏航力矩系数的变化情况。由两种情况的对比可以看出鸭舵差动舵偏虽然使得俯仰力矩系数和偏航力矩系数有所增加,但并未改变其基本变化趋势。滚转控制通道与其他连个控制通道是可以进行解耦的,这对于俯仰、偏航通道的气动参数计算,控制设计等具有重要意义。
附图说明
23.图1是鸭式导弹布局示意图。
24.图2是
“×”
字型布局示意图。
25.图3是不同侧滑角情况下,二级鸭翼产生的滚转控制力矩系数相对于攻角的变化规律。
26.图4是不同侧滑角情况下,二级鸭翼无舵偏时俯仰力矩系数随攻角的变化规律。
27.图5是不同侧滑角情况下,二级鸭翼差动10
°
时俯仰力矩系数随攻角的变化规律。
28.图6是不同侧滑角情况下,二级鸭翼无舵偏时偏航力矩系数随攻角的变化规律。
29.图7是不同侧滑角情况下,二级鸭翼差动10
°
时偏航力矩系数随攻角的变化规律。
30.图8是本发明小型高机动导弹气动布局三视图及各部位相对位置示意图。
31.附图标记说明:1为导弹头部,2为导弹弹身,3为一级鸭翼,4为二级鸭翼,5为尾翼。
具体实施方式
32.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
33.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
34.如图8所示,本发明的一种40mm直径小型高机动导弹气动布局的具体实施方式如下:
35.导弹头部1为旋成体结构,母线为抛物线。头部长度为86mm,头部最大直径为40mm。导弹头部1与弹身2前端相连接。
36.弹身2为圆柱形,长度为578mm,弹身直径为40mm。
37.一级鸭翼3为平板翼,4个翼面呈
“×”
字型布局,根弦长40mm,梢弦长20mm,半展长为30mm,翼面厚2mm,铰链位置(舵机输出轴)据头部196mm。翼根侧表面的对称中心有用于连接舵机输出轴的连接孔位。4个翼面分别与4个独立的舵机输出轴连接。
38.二级鸭翼4为平板翼,2个翼面呈
“ⅰ”
字型布局,二级鸭翼位于导弹的纵向对称平面内。根弦长20mm,梢弦长10mm,半展长为20mm,翼面厚2mm,铰链(舵机输出轴)据头部位置246mm。翼根侧表面的对称中心有用于连接舵机输出轴的连接孔位。2个翼面分别与2个独立的舵机输出轴连接。
39.尾翼5为平板翼,4个翼面呈
“×”
字型布局,根弦长70mm,梢弦长40mm,半展长为40mm,翼面厚2mm,尾翼后缘与导弹底部平齐。4个尾翼与弹身表面固接。
40.导弹飞行时,4个一级鸭翼执行俯仰及偏航通道的控制,2个二级鸭翼执行滚转通道的控制。由控制系统根据导弹飞行的需要,分别调整控制每个舵面的偏转角度。
41.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1