一种抓取设备的制作方法
1.本技术涉及乏燃料转运技术领域,尤其涉及一种抓取设备。
背景技术:
2.在反应堆中,乏燃料贮存水池用于贮存自堆内转运出的乏燃料。乏燃料具有很强放射性,贮存在乏燃料贮存水池内的水池格架插筒中。乏燃料贮存水池内充满水,须保证一定高度的屏蔽水层用以屏蔽乏燃料的放射性,保护操作人员免受超负荷的剂量。
3.乏燃料在水池内的转运过程:首先抓取乏燃料组件,然后提升乏燃料组件至贮存格架上方。水平移动乏燃料至指定格架插筒上方,然后下放乏燃料组件至指定格架插筒内。
4.在乏燃料转运过程中,乏燃料存在跌落的风险。
技术实现要素:
5.有鉴于此,本技术实施例期望提供一种抓取设备,以降低乏燃料跌落的风险。
6.为达到上述目的,本技术实施例一方面提供一种抓取设备,包括:
7.抓具主体,具有用于夹持物料的抓取状态和用于松开物料的释放状态;
8.活动组件,安装于所述抓具主体,所述活动组件能够相对于所述抓具主体移动以使所述抓具主体在抓取状态和释放状态之间切换;
9.自锁装置,穿设于所述活动组件且与所述活动组件连接,所述自锁装置具有锁止状态和解锁状态,所述自锁装置在所述锁止状态下限制所述活动组件相对于所述抓具主体移动,所述自锁装置在所述解锁状态下脱离所述抓具主体以使所述活动组件能够相对于所述抓具主体移动;以及
10.导向装置,具有第一状态和第二状态,所述导向装置在所述第一状态下与所述自锁装置抵接以使所述自锁装置处于锁止状态,所述导向装置在所述第二状态下与所述自锁装置脱离以使所述自锁装置处于所述解锁状态,所述导向装置用于引导所述活动组件相对于所述导向装置移动以使所述导向装置在所述第一状态和所述第二状态之间切换。
11.一实施例中,所述自锁装置包括:
12.安装套筒,与所述活动组件连接,具有第一限位部;
13.锁芯,具有第二限位部,所述第一限位部和所述第二限位部之间围设成安装区,所述安装套筒可移动地套设于所述锁芯;以及
14.弹性件,位于所述安装区内,所述弹性件部分地位于所述安装套筒内;
15.其中,当所述导向装置处于所述第一状态,所述导向装置与所述锁芯抵接的位置位于所述第二限位部背离所述第一限位部的一侧,所述抓具主体位于所述第一限位部背离所述第二限位部的一侧,所述弹簧处于压缩状态,所述锁芯位于所述抓具主体的上方以限制所述活动组件相对于所述抓具主体下移,所述自锁装置处于所述锁止状态;当所述导向装置处于所述第二状态,所述导向装置与所述锁芯脱离,所述弹性件驱动所述锁芯脱离所述抓具主体,所述自锁装置处于所述解锁状态。
16.一实施例中,所述锁芯包括:
17.锁轴,所述第二限位部形成于所述锁轴,所述安装套筒可移动地套设于所述锁轴,当所述导向装置处于第一状态,所述自锁装置处于锁止状态,所述锁轴位于所述抓具主体的上方,限制所述活动组件相对于所述抓具主体移动;以及
18.第一滚轮,与所述锁轴转动连接,所述第一滚轮位于所述第二限位部背离所述第一限位部的一侧,所述当所述导向装置处于第一状态,所述自锁装置处于锁止状态,所述第一滚轮与所述导向装置抵接。
19.一实施例中,所述锁芯形成有第三限位部,所述安装套筒位于所述第二限位部和第三限位部之间,所述安装套筒能够与所述第二限位部抵接,以阻止所述锁芯沿所述第二限位部指向所述第一限位部的方向移动,所述安装套筒能够与所述第三限位部抵接,以阻止所述锁芯沿所述第三限位部指向所述第一限位部的方向移动。
20.一实施例中,所述活动组件形成有第一驱动环,具有高支撑部和低支撑部,所述抓具主体包括:
21.主轴,具有第一轴段和位于所述第一轴段下方的第二轴段,所述活动组件可移动地套设于所述第一轴段,所述第一轴段用于防止所述活动组件绕所述主轴转动,所述第二轴段形成有第二驱动环,所述自锁装置在所述锁止状态下限制所述活动组件相对于所述主轴沿轴向下移,所述自锁装置在所述解锁状态下脱离所述主轴以使所述活动组件能够相对于所述主轴移动;
22.转子,可移动地套设于所述第二轴段,所述转子能够绕所述第二轴段转动,所述转子具有内臂以及外臂,所述内臂位于所述转子沿径向朝向所述第二轴段的一侧,所述外臂位于所述转子沿径向背离所述第二轴段的一侧;以及
23.卡爪,与所述第二轴段转动连接,具有用于夹持物料的扣合状态和用于释放物料的张开状态,所述卡爪在所述扣合状态下沿所述第二轴段的径向朝向所述第二轴段扣合,所述卡爪在张开状态下沿所述第二轴段的径向背离所述第二轴段张开;
24.其中,所述高支撑部用于支撑所述外臂将转子抬高至第一位置以使所述卡爪处于张开状态,所述低支撑部用于支撑所述外臂将所述转子抬高至第二位置以使所述卡爪处于扣合状态,所述第一位置高于所述第二位置;所述第二驱动环用于支撑所述内臂并通过所述内臂驱动所述转子转动,以使所述高支撑部和所述低支撑部交替支撑所述外臂。
25.一实施例中,所述导向装置具有导向孔,所述导向装置用于引导所述活动组件在所述导向孔内沿所述导向孔的轴向相对于所述导向装置移动;当所述导向装置处于所述第一状态,所述自锁装置处于所述锁止状态,所述自锁装置位于所述导向孔内且与所述导向孔的内壁抵接;当所述导向装置处于所述第二状态,所述自锁装置处于解锁状态,所述自锁装置位于所述导向孔外。
26.一实施例中,所述导向装置包括:
27.导向套筒,所述导向孔形成于所述导向套筒;
28.滚轮座,与导向套筒连接;以及
29.第二滚轮,与所述滚轮座转动连接。
30.一实施例中,所述导向套筒沿径向的相对两侧均设置有所述第二滚轮,所述第二滚轮形成有环形凹槽,所述活动组件形成有引导部,所述活动组件沿所述导向套筒的径向
的相对两侧均设置有所述引导部,每侧所述引导部位于对应所述环形凹槽内,两侧所述第二滚轮之间的距离大于两侧所述引导部之间的距离。
31.一实施例中,所述导向套筒包括:
32.第一套筒,与所述滚轮座连接;以及
33.第二套筒,与所述第一套筒连接,所述导向孔贯穿于所述第一套筒和所述第二套筒。
34.一实施例中,所述活动组件包括:
35.活动件本体,安装于所述抓具主体,所述活动件本体能够相对于所述抓具主体移动以使所述抓具主体在抓取状态和释放状态之间切换,所述自锁装置安装于所述活动件本体的顶端,所述自锁装置在所述锁止状态下限制所述活动件本体相对于所述抓具主体移动,所述自锁装置在所述解锁状态下脱离所述抓具主体以使所述活动件本体能够相对于所述抓具主体移动;以及
36.安装柱,连接于所述活动件本体背离所述抓具主体的一端,所述导向装置用于引导所述安装柱相对于所述导向装置移动以使所述导向装置在所述第一状态和所述第二状态之间切换。
37.本技术实施例的抓取装置,通过导向装置引导活动组件相对于导向装置移动,使得导向装置在第一状态和第二状态之间切换。当导向装置引导活动组件下移使抓具主体下放到目标位置以抓取或释放物料,导向装置处于第二状态,导向装置与自锁装置脱离,自锁装置处于解锁状态,通过活动组件相对于抓具主体移动使抓具主体在抓取状态和释放状态之间切换,从而抓取或释放物料。当抓具主体抓取物料后,抓具主体处于抓取状态,导向装置引导活动组件上移,使导向装置从第二状态切换到第一状态,导向装置与自锁装置抵接,自锁装置处于锁止状态,活动组件相对于抓具主体的移动被限制,即便物料在下移过程中与障碍物碰撞使物料向上顶住抓具主体,活动组件也无法相对于抓具主体移动,抓具主体无法在抓取状态和释放状态之间切换,因此,抓具主体无法从夹持物料的抓取状态切换到松开物料的释放状态,抓具主体通过自锁装置保持抓取状态从而防止物料跌落。
附图说明
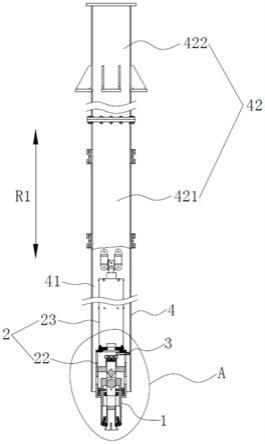
38.图1为本技术实施例的抓取设备的结构示意图;
39.图2为本技术实施例的抓具主体的结构示意图;
40.图3为图1中位置a处的放大视图,图中示出的自锁装置处于锁止状态;
41.图4为图1中位置a处的放大视图,图中示出的自锁装置处于解锁状态,活动组件相对于主轴下移至与转子的外臂脱离;
42.图5为图1中位置a处的放大视图,图中示出的自锁装置处于解锁状态,活动组件上移将转子抬高至打开卡爪的位置;
43.图6为本技术实施例的自锁装置的结构示意图;
44.图7为本技术实施例的导向装置的结构示意图;
45.图8为本技术实施例的导向套筒、安装柱、滚轮座以及第二滚轮的装配图;
46.图9为图8中位置b处的放大视图;
47.图10为本技术实施例的滚轮座与第二滚轮的装配图;
48.图11为本技术实施例的安装柱的结构示意图。
49.附图标记说明:抓具主体1;主轴11;第一轴段111;第二轴段112;第二驱动环1121;轴本体1122;轴套1123;转子12;内臂121;外臂122;卡爪13;活动组件2;引导部21;活动件本体22;第一驱动环221;安装柱23;限位挡板231;锁装置3;安装套筒31;第一限位部311;锁芯32;第二限位部321;锁轴322;第一滚轮323;第三限位部324;安装区33;弹性件34;导向装置4;导向孔41;导向套筒42;第一套筒421;第二套筒422;第二滚轮43;环形凹槽431;滚轮座44;过渡面45;第一支撑装置5;第二支撑装置6;乏燃料100。
具体实施方式
50.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的技术特征可以相互组合,具体实施方式中的详细描述应理解为本技术宗旨的解释说明,不应视为对本技术的不当限制。
51.在本技术实施例的描述中,“上”、“下”、“顶”、“底”、方位或位置关系为基于附图1所示的方位或位置关系,需要理解的是,这些方位术语仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。以图1为参考,上下方向为图中箭头r1所示的方向。
52.作为本技术创造性构思的一部分,在描述本技术的实施例之前,需对相关技术中,乏燃料跌落的原因进行分析,通过合理的分析得到本技术实施例的技术方案。
53.相关技术中,公开号为cn108840230a的专利公开了一种无动力自动吊具及操作方法,通过外筒体相对于内筒体上下移动,以使卡爪扣合抓取乏燃料,或使卡爪张开释放乏燃料。可以理解的是,在乏燃料下放过程中,乏燃料未下放到位前可能发生卡滞,例如乏燃料未下放到位前与障碍物碰撞,乏燃料顶住内套筒,使外套筒相对于内套筒下移,当外套筒在牵引机构的作用下相对于内套筒再次上移,卡爪会被转子打开而释放乏燃料,造成乏燃料跌落。
54.鉴于此,本技术实施例提供一种抓取设备,请参阅图1,抓取设备包括抓具主体1、活动组件2、自锁装置3以及导向装置4。抓具主体1具有用于夹持物料的抓取状态和用于松开物料的释放状态。活动组件2安装于抓具主体1,活动组件2能够相对于抓具主体1移动以使抓具主体1在抓取状态和释放状态之间切换。自锁装置3穿设于活动组件2且与活动组件2连接,自锁装置3具有锁止状态和解锁状态,自锁装置3在锁止状态下限制活动组件2相对于抓具主体1移动,自锁装置3在解锁状态下脱离抓具主体1以使活动组件2能够相对于抓具主体1移动。导向装置4具有第一状态和第二状态,导向装置4在第一状态下与自锁装置3抵接以使自锁装置3处于锁止状态,导向装置4在第二状态下与自锁装置3脱离以使自锁装置3处于解锁状态,导向装置4用于引导活动组件2相对于导向装置4移动以使导向装置4在第一状态和第二状态之间切换。如此结构形式,通过导向装置4引导活动组件2相对于导向装置4移动,使得导向装置4在第一状态和第二状态之间切换。当导向装置4引导活动组件2下移使抓具主体1下放到目标位置以抓取或释放物料,导向装置4处于第二状态,导向装置4与自锁装置3脱离,自锁装置3处于解锁状态,通过活动组件2相对于抓具主体1移动使抓具主体1在抓取状态和释放状态之间切换,从而抓取或释放物料。当抓具主体1抓取物料后,抓具主体1处于抓取状态,导向装置4引导活动组件2上移,使导向装置4从第二状态切换到第一状态,导
向装置4与自锁装置3抵接,自锁装置3处于锁止状态,活动组件2相对于抓具主体1的移动被限制,即便物料在下移过程中与障碍物碰撞使物料向上顶住抓具主体1,活动组件2也无法相对于抓具主体1移动,抓具主体1无法在抓取状态和释放状态之间切换,因此,抓具主体1无法从夹持物料的抓取状态切换到松开物料的释放状态,抓具主体1通过自锁装置3保持抓取状态从而防止物料跌落。
55.一实施例中,物料可以为乏燃料100。
56.一实施例中,自锁装置3与活动组件2焊接或螺栓连接。
57.一实施例中,请参阅图1,图3~图6,自锁装置3包括安装套筒31、锁芯32以及弹性件34。安装套筒31与活动组件2连接,具有第一限位部311。锁芯32具有第二限位部321,第一限位部311和第二限位部321之间围设成安装区33,安装套筒31可移动地套设于锁芯32。弹性件34位于安装区33内,弹性件34部分地位于安装套筒31内。其中,当导向装置4处于第一状态,导向装置4与锁芯32抵接的位置位于第二限位部321背离第一限位部311的一侧,抓具主体1位于第一限位部311背离第二限位部321的一侧,弹簧处于压缩状态,锁芯32位于抓具主体1的上方以限制活动组件2相对于抓具主体1下移,自锁装置3处于锁止状态;当导向装置4处于第二状态,导向装置4与锁芯32脱离,弹性件34驱动锁芯32脱离抓具主体1,自锁装置3处于解锁状态。如此结构形式,通过导向件驱动自锁装置3的锁芯32移动,从而使自锁装置3在锁止状态和解锁状态之间切换。当导向装置4从第二状态切换到第一状态,导向装置4与锁芯32抵接以推动锁芯32沿第二限位部321指向第一限位部311的方向移动至抓具主体1的上方,使锁芯32能够限制活动组件2相对于抓具主体1下移,从而防止抓具主体1从抓取状态切换到释放状态。抓具主体1保持在抓取状态,防止物料跌落。安装套筒31穿设于锁芯32,弹性件34部分地位于安装套筒31内,使得安装套筒31对弹性件34的移动起到一定的导向作用。
58.一实施例中,安装套筒31与活动组件2焊接或螺栓连接。
59.一实施例中,第一限位部311位于安装套筒31的内侧。
60.一实施例中,第一限位部311呈环形。
61.一实施例中,第一限位部311位于安装套筒31的外侧,弹性件34可以套设在安装套筒31的外侧。
62.一实施例中,第二限位部321呈环形。
63.一实施例中,弹性件34可以为弹簧。
64.一实施例中,弹性件34分别与第一限位部311和第二限位部321抵接。示例性地,弹性件34接触第一限位部311上相应的面,但两者没有连接,随着锁芯32相对于安装套筒31移动,弹性件34可能与第一限位部311分离。弹性件34接触第二限位部321上的面,但两者没有连接,随着锁芯32相对于安装套筒31移动,弹性件34可能与第二限位部321分离。
65.一实施例中,弹性件34分别与第一限位部311和第二限位部321连接。示例性地,第一限位部311形成有挂钩或相应的孔,弹性件34的一端穿设于第一限位部311的相应挂钩或孔内,第二限位部321形成有挂钩或相应的孔,弹性件34的另一端穿设于第二限位部321的相应的挂钩或孔。随着锁芯32相对于安装套筒31移动,弹性件34始终安装于第一限位部311和第二限位部321相应的挂钩或孔内,使弹性件34分别与第一限位部311和第二限位部321连接,弹性件34与第一限位部311不会分离,弹性件34与第二限位部321不会分离。
66.一实施例中,沿第一限位部311和第二限位部321的排列方向,安装区33的尺寸可以大于弹簧不受外力作用下的长度。
67.一实施例中,请参阅图6,第一限位部311位于安装套筒31背离第二限位部321的一端。
68.一实施例中,请参阅图6,锁芯32包括锁轴322以及第一滚轮323。第二限位部321形成于锁轴322,安装套筒31可移动地套设于锁轴322,当导向装置4处于第一状态,自锁装置3处于锁止状态,锁轴322限制活动组件2相对于抓具主体1移动。第一滚轮323与锁轴322转动连接,第一滚轮323位于第二限位部321背离第一限位部311的一侧,当导向装置4处于第一状态,自锁装置3处于锁止状态,第一滚轮323与导向装置4抵接。如此结构形式,通过锁轴322限制活动组件2相对于抓具主体1移动,防止乏燃料100跌落。通过第一滚轮323与导向装置4抵接,一方面使得锁轴322能够保持在限制活动组件2相对于抓具主体1移动的位置,另一方面,当导向装置4引导活动组件2移动过程中,与活动组件2连接的自锁装置3通过第一滚轮323与导向装置4抵接,能够在一定程度上减少活动组件2相对于导向装置4移动的过程中的摩擦力。
69.一实施例中,可以不设置第一滚轮323,锁轴322与导向装置4抵接。
70.一实施例中,请参阅图6,锁芯32形成有第三限位部324,安装套筒31位于第二限位部321和第三限位部324之间,安装套筒31能够与第二限位部321抵接,以阻止锁芯32沿第二限位部321指向第一限位部311的方向移动,安装套筒31能够与第三限位部324抵接,以阻止锁芯32沿第三限位部324指向第一限位部311的方向移动。如此结构形式,通过第二限位部321和第三限位部324对安装套筒31限位,防止锁芯32在安装套筒31内移动的过程中脱离安装套筒31。
71.一实施例中,第三限位部324呈环形。
72.一实施例中,自锁装置3在锁止状态下与抓具主体1抵接,以限制活动组件2相对于抓具主体1移动。
73.一实施例中,锁芯32位于抓具主体1的上方且与抓具主体1抵接,以限制活动组件2相对于抓具主体1移动。
74.一实施例中,锁轴322位于抓具主体1的上方且与抓具主体1抵接,以限制活动组件2相对于抓具主体1移动。
75.一实施例中,请参阅图2~图5,活动组件2形成有第一驱动环221,具有高支撑部和低支撑部。抓具主体1包括主轴11、转子12以及卡爪13。主轴11具有第一轴段111和位于第一轴段111下方的第二轴段112,活动组件2可移动地套设于第一轴段111,第一轴段111用于防止活动组件2绕主轴11转动,第二轴段112形成有第二驱动环1121,自锁装置3在锁止状态下限制活动组件2相对于主轴11沿轴向下移,自锁装置3在解锁状态下脱离主轴11以使活动组件2能够相对于主轴11移动。转子12可移动地套设于第二轴段112,转子12能够绕第二轴段112转动,转子12具有内臂121以及外臂122,内臂121位于转子12沿径向朝向第二轴段112的一侧,外臂122位于转子12沿径向背离第二轴段112的一侧。卡爪13与第二轴段112转动连接,具有用于夹持物料的扣合状态和用于释放物料的张开状态,卡爪13在扣合状态下沿第二轴段112的径向朝向第二轴段112扣合,卡爪13在张开状态下沿第二轴段112的径向背离第二轴段112张开。其中,高支撑部用于支撑外臂122将转子12抬高至第一位置以使卡爪13
处于张开状态,低支撑部用于支撑外臂122将转子12抬高至第二位置以使卡爪13处于扣合状态,第一位置高于第二位置;第二驱动环1121用于支撑内臂121并通过内臂121驱动转子12转动,以使高支撑部和低支撑部交替支撑外臂122。如此结构形式,当活动组件2跟随主轴11下移至目标位置以抓取乏燃料100,导向装置4处于第二状态,导向装置4与自锁装置3脱离,自锁装置3处于解锁状态,抓具主体1处于释放状态,主轴11被乏燃料100顶住不再下移,活动组件2继续下移,使第一驱动环221脱离外臂122,转子12通过内臂121支撑于第二驱动环1121,在转子12的重力作用下第二驱动环1121驱动转子12转过一定的角度,转子12的下端将卡爪13沿主轴11的径向压向乏燃料100,使卡爪13扣合于乏燃料100,抓具主体1处于抓取状态,活动组件2上移,第一驱动环221支撑外臂122将转子12抬起,在转子12的重力作用下,第一驱动环221驱动转子12转过一定的角度使外臂122支撑于第一驱动环221的低支撑部,低支撑部将转子12抬高至较低的第二位置,转子12不会打开卡爪13,卡爪13仍处于扣合状态,抓具主体1处于抓取状态。当活动组件2跟随主轴11下移至目标位置以释放乏燃料100,导向装置4处于第二状态,导向装置4与自锁装置3脱离,自锁装置3处于解锁状态,抓具主体1处于抓取状态,主轴11被乏燃料100顶住不再下移,活动组件2继续下移,以使第一驱动环221脱离外臂122,转子12通过内臂121支撑于第二驱动环1121,在转子12的重力作用下第二驱动环1121驱动转子12转过一定的角度,卡爪13仍处于扣合状态,抓具主体1处于抓取状态,活动组件2上移,第一驱动环221支撑外臂122将转子12抬起,在转子12的重力作用下,第一驱动环221驱动转子12转过一定的角度使外臂122支撑于第一驱动环221的高支撑部,高支撑部将转子12抬高至较高的第一位置以使转子12打开卡爪13,卡爪13处于张开状态,抓具主体1处于释放状态,以释放乏燃料100。当导向装置4处于第二状态,自锁装置3处于解锁状态,活动组件2往复上下移动,使高支撑部和低支撑部交替支撑外臂122将转子12抬至不同高度的位置,从而使卡爪13能够在扣合状态和张开状态之间切换,抓具主体1在抓取状态和释放状态之间切换。牵引活动组件2在导向装置4的引导下向上移动带动主轴11和转子12上移,以使与活动组件2连接的自锁装置3与导向装置4抵接,导向装置4从第二状态切换至第一状态,通过自锁装置3限制活动组件2相对于主轴11沿轴向下移,即使在卡爪13夹持乏燃料100下移的过程中遇到障碍物,导致乏燃料100向上顶主轴11,由于自锁装置3将活动组件2与主轴11锁止,活动组件2也无法相对于主轴11下移,卡爪13不会被打开,防止乏燃料100跌落。
76.需要解释的是,高支撑部和低支撑部是相对而言的,高支撑部的位置高于低支撑部的位置。
77.一实施例中,自锁装置3也可以视情况在锁止状态下限制活动组件2相对于转子12下移。可以理解的是,转子12是靠重力交替地支撑在第一驱动环221和第二驱动环1121上的,当自锁装置3处于锁止状态,转子12的外臂122支撑于第一驱动环221,活动组件2相对于主轴11下移以使转子12的内臂121支撑于第二驱动环1121,由于自锁装置3限制活动组件2相对于转子12下移,第一驱动环221无法继续下移以脱离外臂122,在第一驱动环221的高支撑部或低支撑部对外臂122的支撑作用下,第二驱动环1121无法驱动内臂121带动转子12转动,即使活动组件2再次上移,转子12的外臂122也不会在高支撑部和低支撑部之间切换,转子12被第一驱动环221上抬的高度不会改变,卡爪13无法从扣合状态切换到张开状态,抓具主体1无法从抓取状态切换到释放状态,能够起到防止乏燃料100跌落的作用。
78.一实施例中,第一驱动环221可以采用公开号为cn108840230a的专利中的第一环形齿条。第二驱动环1121可以采用公开号为cn108840230a的专利中的第二环形齿条。
79.一实施例中,请参阅图2,第一轴段111的截面形状呈方形以防止套设于第一轴段111的活动组件2转动。
80.一实施例中,第二轴段112包括位于第一轴段111下方的轴本体1122以及位于轴本体1122下方的轴套1123。
81.一实施例中,轴本体1122可以采用公开号为cn108840230a的专利中的圆形柱体。轴套1123可以采用公开号为cn108840230a的专利中的筒体。
82.一实施例中,转子12形成有拨条,当第一驱动环221的高支撑部将转子12抬高至第一位置,转子12的拨条带动卡爪13转动以使卡爪13张开,释放乏燃料100。
83.一实施例中,转子12可以采用公开号为cn108840230a的专利中的活动体。
84.一实施例中,卡爪13可以采用采用公开号为cn108840230a的专利中的卡爪13。
85.一实施例中,请参阅图3~图5,导向装置4具有导向孔41,导向装置4用于引导活动组件2在导向孔41内沿导向孔41的轴向相对于导向装置4移动;当导向装置4处于第一状态,自锁装置3处于锁止状态,自锁装置3位于导向孔41内且与导向孔41的内壁抵接;当导向装置4处于第二状态,自锁装置3处于解锁状态,自锁装置3位于导向孔41外。如此结构形式,通过导向装置4引导活动组件2在导向孔41内沿导向孔41的轴向相对于导向装置4移动,利用活动组件2带动抓具主体1沿导向孔41的轴向上下移动以抓取、转动和释放乏燃料100的过程,即能够较为方便地根据实际需要切换导向装置4的状态,进而切换自锁装置3的状态,不需要执行额外的锁止或解锁动作,使得抓取设备的操作较为方便。且抓具主体1抓取乏燃料100转运过程中,活动组件2、自锁装置3抓具主体1以及被抓具主体1夹持的燃料可以移动至导向套筒42内,能够降低外部环境对活动组件2、自锁装置3、抓具主体1以及被抓具主体1夹持的燃料的干扰。
86.一实施例中,导向装置4可以为敝开式的结构,例如导向装置4可以采用滑轨,滑轨引导活动组件2相对于滑轨移动,自锁装置3可以与滑轨抵接。
87.一实施例中,请参阅图7~图9,导向装置4包括导向套筒42,滚轮座44以及第二滚轮43。导向孔41形成于导向套筒42。滚轮座44与导向套筒42连接。第二滚轮43与滚轮座44转动连接。如此结构形式,通过滚轮对活动组件2的移动进行引导,活动组件2在导向孔41内上下移动过程中,当活动组件2出现偏移,第二滚轮43与活动组件2接触以防止活动组件2继续偏移,第二滚轮43与活动组件2接触,能够减少活动组件2上下移动的摩擦阻力。
88.一实施例中,可以不设置第二滚轮43和滚轮座44,通过活动组件2与导向孔41的内壁接触以防止活动组件2继续偏移。
89.一实施例中,请参阅图7~图10,导向套筒42沿径向的相对两侧均设置有第二滚轮43,第二滚轮43形成有环形凹槽431,活动组件2形成有引导部21,活动组件2沿导向套筒42的径向的相对两侧均设置有引导部21,每侧引导部21位于对应环形凹槽431内,两侧第二滚轮43之间的距离大于两侧引导部21之间的距离。如此结构形式,相对两侧均设置有第二滚轮43,活动组件2沿两侧滚轮的任一侧移动都能与相应地滚轮接触,能够较好地约束活动组件2,引导活动组件2移动,减少活动组件2的摩擦力,两侧相对布置的引导部21分别位于对应的第二滚轮43的环形凹槽431内,能够限制活动组件2在上下移动的过程中发生转动。两
侧第二滚轮43之间的距离大于两侧引导部21之间的距离,减少活动组件2的引导部21持续与第二滚轮43接触的可能性,降低活动组件2上下移动过程中的阻力。
90.一实施例中,抓取设备还包括牵引绳,牵引绳与活动组件2连接以牵引活动组件2移动。
91.一实施例上,牵引绳的数量为多根。两侧引导部21位于两侧环形凹槽431内,以防止活动组件2在上下移动过程中发生转动,避免多根牵引绳相互缠绕。
92.一实施例中,请参阅图7,每侧第二滚轮43的数量为多个,每侧第二滚轮43沿导向孔41的轴向排列。
93.一实施例中,第二滚轮43可以设置在导向套筒42沿径向的一侧,对应的另一侧可以不设置第二滚轮43。
94.一实施例中,请参阅图8和图9,滚轮座44安装于导向套筒42外,第二滚轮43部分地位于导向孔41内。如此结构形式,使得导向孔41内能够留出足够的空间以便于活动组件2在导向孔41内移动。对于同样大小的活动组件2,能够在一定程度上减少导向套筒42的直径,节省材料,降低成本。可以通过在滚轮座44与导向套筒42之间增减垫片的方向调节第二滚轮43与活动组件2之间的间隙。
95.一实施例中,滚轮座44可以安装于导向套筒42外。
96.一实施例中,请参阅图5,导向套筒42形成有位于导向孔41下端的过渡面45,沿向下的方向,过渡面45逐渐向导向套筒42的外侧倾斜。
97.一实施例中,请参阅图7,导向套筒42包括第一套筒421和第二套筒422,第一套筒421与滚轮座44连接,第二套筒422与第一套筒421连接,导向孔41贯穿于第一套筒421和第二套筒422。如此结构形式,导向套筒42分为两段,可以先吊起第一套筒421转运到相应位置后,将第一套筒421下沉,再将第二套筒422起吊至第一套筒421的上方并与第一套筒421连接,分两次起吊安装,能够在一定程度上降低导向套筒42的起吊高度,便于安装导向套筒42。
98.一实施例中,请参阅图7,抓取设备还包括第一支撑装置5和第二支撑装置6,第一支撑装置5连接在第二套筒422的外部以用于将第二套筒422安装至相应的搬动装置,通过搬动装置驱动第二套筒422和第一套筒421移动。第二支撑装置6连接在第二套筒422背离第一套筒421的一端的开口处,第二支撑装置6用于安装牵引绳导向器,牵引绳设置在牵引绳导向器上并与活动组件2连接,以牵引活动组件2移动。
99.一实施例中,过渡面45形成于第一套筒421。
100.一实施例中,导向套筒42也可以设置成一整段。
101.一实施例中,请参阅图1、图3~图5以及图10,活动组件2包括活动件本体22以及安装柱23,活动组件2本体安装于抓具主体1,活动件本体22能够相对于抓具主体1移动以使抓具主体1在抓取状态和释放状态之间切换,自锁装置3安装于活动件本体22的顶端,自锁装置3在锁止状态下限制活动件本体22相对于抓具主体1移动,自锁装置3在解锁状态下脱离抓具主体1以使活动件本体22能够相对于抓具主体1移动。安装柱23连接于活动件本体22背离抓具主体1的一端,导向装置4用于引导安装柱23相对于导向装置4移动以使导向装置4在第一状态和第二状态之间切换。如此结构形式,活动件本体22安装于抓具主体1,并能够沿抓具主体1移动,活动件本体22可以根据与抓具主体1的适配需要设置活动件本体22的形
状,而不需要考虑活动件本体22与导向装置4的适配以使导向装置4能够引导活动件本体22移动。安装柱23连接于活动件本体22背离抓具主体1的一端,安装柱23的形状不需要与抓具主体1适配,安装柱23的形状可以与导向装置4适配以使导向装置4能够引导安装柱23相对于导向装置4移动。活动件本体22和安装柱23分别适应不同的形状需要,以使活动组件2既能够相对于抓具主体1移动,又能够在导向装置4的引导下相对于导向装置4移动,在一定程度上简化零部件的结构。
102.一实施例中,活动件本体22与安装柱23通过螺栓连接。
103.一实施例中,安装柱23位于活动件本体22的上方。
104.一实施例中,请参阅图8和图9,引导部21形成于安装柱23。
105.一实施例中,请参阅图8、图9以及图11,安装柱23的截面形状呈矩形。引导部21位于矩形截面的其中一条对角线的相对两端。
106.一实施例中,请参阅图3~图5,第一驱动环221形成于活动件本体22。
107.一实施例中,请参阅图11,安装柱23的顶部设置有限位挡板231,限位挡板231用于与限位开关配合以限位安装柱23被提升的最大高度。
108.一实施例中,可以不设置安装柱23,导向装置4引导活动件本体22相对于导向装置4移动。
109.本技术提供的各个实施例/实施方式在不产生矛盾的情况下可以相互组合。
110.以上仅为本技术的较佳实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1