一种进料堆栈层压机组件走位方法与流程
1.本发明属于太阳能光伏组件领域,具体涉及一种进料堆栈层压机组件走位方法。
背景技术:
2.现有的堆栈式层压机进料逻辑和进料平台进料逻辑一样,组件在进料时主机给出一次触发信号完成多块组件进料,但是这种堆栈式进料台层压机每一块组件之间间距受堆栈进料台走位精度影响,且堆栈进料台走位精度远低于皮带传输台精度,堆栈进料台层压机上一块组件偏差会影响到下一块组件进料精度,造成误差积累,导致最后一块组件精度无法满足生产技术要求。
技术实现要素:
3.本发明针对上述现有技术中存在的缺陷,为了提高进料堆栈层压机组件走位精度,本发明提供一种进料堆栈层压机组件走位方法,每一块组件都由一次固定步数触发,对于设备而言,每块组件都是一次新的起点,不受前面进料组件歪斜影响,有效提高了进料堆栈层压机组件走位精度。
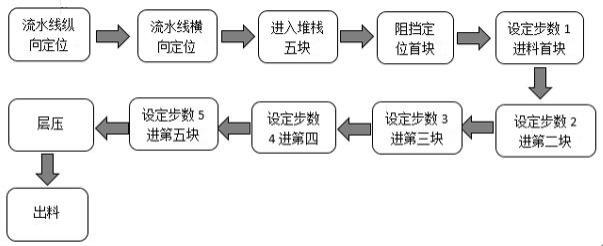
4.本发明提出的技术方案如下:本发明公开了一种进料堆栈层压机组件走位方法,包括以下步骤:s1:待层压件进入流水线进行定位;s2:待层压件进入层压机堆栈;s3:第一待层压件进入堆栈二次定位;s4:待层压件由预设步数触发进料。
5.进一步的,s1所述流水线定位包括流水线纵向定位和流水线横向定位。
6.进一步的,s3所述第一待层压件进入堆栈二次定位采用机械阻挡定位方式。
7.进一步的,所述机械阻挡定位方式采用两个顶升阻挡气缸。
8.进一步的,s4所述待层压件由预设步数触发进料通过plc程序控制执行。
9.进一步的,所述plc程序的逻辑具体如下:检测层压机主机运行步数,当主机运行步数等于第一预设步数,进料堆栈开始同步运行,控制第一待层压件开始进料;当主机运行步数等于第二预设步数,控制第二待层压件开始进料;当主机运行步数等于第三预设步数,控制第三待层压件开始进料;以此类推,直至全部待层压件进料完毕。
10.进一步的,所述层压机主机使用减速电机。
11.进一步的,所述预设步数根据层压机腔体有效面积设定。
12.进一步的,所述待层压件在层压机腔体内等间距排列,且在层压机腔体和待层压件间设置安全距离。
13.本技术的有益效果包含:本发明改变了现有技术中堆栈式进料层压机一次性触发多块组件进料的逻辑思
路,使用每一块组件都由一次固定步数触发的逻辑思路,对于设备而言,每块组件都是一次新的起点,不受前面进料组件歪斜影响,消除每块组件进料造成误差积累,并且,在首块待层压件进料时采取了机械阻挡定位方式,与现有技术使用光电定位首块相比,避免了物品表面反射造成的定位误差和背板铺设时的工艺偏差,有效提高了进料堆栈层压机组件走位精度,走位精度的提升极大程度上提高了产品生产的合格率。
附图说明
14.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1为现有技术中进料堆栈层压机组件走位方法流程示意图;图2为本发明一种进料堆栈层压机组件走位方法流程示意图;图3为本发明一种进料堆栈层压机组件走位方法中待层压件在层压机腔体内的位置示意图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明的技术方案进行详细阐述,通过实施例更好地描述本发明方案。
16.实施例1参照图2 ,本实施例提供一种进料堆栈层压机组件走位方法,该方法包括以下步骤:本实施例使用的进料堆栈式层压机型号为:bsl2456oac-hb,其中,主机电机使用了中大减速电机,型号为:zv3700w-30szq1-g3-tl(380v/50hz),主机变频器型号为:台达vfd9a0ms43ansaa , 堆栈伺服电机型号为台达: ecma-e11315ss , 堆栈伺服控制器型号为台达:asd-a2-1521-m 。
17.s1:待层压件进入流水线定位;具体地,本实施例中的待层压件共有5块组件,待层压件先进入横向流水线,接近横向阻挡时,短边阻挡顶起,待层压件短边流水线皮带低速运转触碰阻挡一定延时纠正待层压件的纵向位置,完成纵向定位;横向流水线短带下降,待层压件开始进入纵向流水线,接近纵向阻挡时,纵向阻挡顶起,待层压件长边流水线皮带低速运转触碰纵向阻挡一定延时纠正待层压件的横向位置,完成横向定位;纵向阻挡下降,流水线皮带纵向和层压机进料堆栈同步运转,使待层压件进入层压机进料堆栈。待层压件触碰堆栈行程开关一定延时后,堆栈升起;重复上述步骤,直至5块待层压件全部定位完毕进入层压机进料堆栈。
18.s2:机械阻挡定位首块待层压件;具体地,当最下层待层压件(也就是进料的首块待层压件)进入层压机进料堆栈时,触碰行程开关后,层压机堆栈内两个顶升阻挡气缸升起,待层压件以低速碰撞阻挡一定延时以确定待层压件的位置,堆栈阻挡下降,进料堆栈停止运行。
19.s3:待层压件由主机预设步数触发进料;具体地,当进料堆栈停止运行后,层压机主机开始运行,待主机运行到950步时,进
料堆栈开始同步运行,第1块待层压件开始进料;待主机运行到1870步,进料堆栈第2块组件下降,传动轴一直运行进料;待主机运行到3150步,进料堆栈第3块组件开始下降进料;待主机运行到4430步,进料堆栈第4块组件开始下降进料;待主机运行到5710步,进料堆栈第5块组件开始下降进料,其中每块组件的触发步数设定根据层压机腔体的有效面积设定,本实施例使用的层压机腔体的有效面积为2400x5600mm,此功能开放到触摸屏界面。
20.s4:进料完毕,层压机层压出料。
21.具体地,参照图3,待层压件进料完毕,在层压机腔内的位置如图3所示,单块待层压件的宽度为1010mm,每块待层压件的间距为70mm,待层压件在腔体两边的安全距离为135mm。
22.另外,本发明实施例还提供一种计算机可读存储介质,其中,该计算机可读存储介质可存储有程序,该程序执行时包括上述方法实施例中记载的任何进料堆栈层压机组件走位方法的部分或全部步骤。
23.另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
24.所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储器中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储器中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储器包括:u盘、只读存储器(rom,read-onlymemory)、随机存取存储器(ram,randomaccessmemory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
25.以上所述的具体实施方式,对本技术的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本技术的具体实施方式而已,并不用于限定本技术的保护范围,凡在本技术的技术方案的基础之上,所做的任何修改、等同替换、改进等,均应包括在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1