遥控红外拖靶
1.本实用新型涉及目标控制技术领域,具体而言,涉及遥控红外拖靶。
背景技术:
2.拖靶是用有人或无人驾驶飞机在空中拖带的一种无动力靶标。它用来模拟飞行器的特性,供部队训练、射击、校飞使用,或用来测试武备系统的性能。随着诸多新技术的应用,拖靶系统具备了更为全面的威胁模拟功能和更为精确的脱靶量测量手段,拖靶系统已经从仅供高炮和航空机炮射击训练使用的旗靶和布袋靶等原始靶标发展成为现代拖靶系统。它的应用增加了空中靶标的品种,为提高靶场和部队的综合供靶能力、降低供靶费用发挥了重要作用。
3.现有的拖靶在使用过程中平衡效果较差,同时在信号接收方面多数为红外遥控,控制容易受到影响,同时不方便进行操控,也不具有拍摄侦查的功能,为此,提成遥控红外拖靶。
技术实现要素:
4.本实用新型的目的在于提供遥控红外拖靶,旨在解决现有技术中存在的问题。
5.本实用新型是这样实现的:遥控红外拖靶,包括拖靶本体、动力舱、单片机、安装器和信号处理器;其中,所述拖靶本体的前侧壁右侧中央位置固定安装有红外信号发生器,所述拖靶本体的内腔左侧壁中央位置固定安装有动力舱,所述动力舱的右侧设置有定位器,所述定位器的右侧固定安装有控制器,所述拖靶本体的内腔右侧顶部和底部均设置有单片机,所述拖靶本体的底部左右两侧均固定安装有安装器,所述拖靶本体的顶部中央位置固定安装有信号处理器,所述单片机和信号处理器与控制器电性连接。
6.通过上述的技术方案,能够利用信号处理器对信号进行接收,利用控制器对信号进行处理控制,再通过单片机进行操控,利用定位器对拖靶本体进行定位,再利用动力舱提供动力,方便拖靶本体进行使用。
7.优选的,所述拖靶本体的顶部左侧固定安装有连接器,所述连接器与拖缆相连接,所述拖靶本体的左侧中央位置固定安装有平衡尾翼。
8.通过上述的技术方案,平衡尾翼能够对拖靶本体提供平衡,保证飞行,通过连接器能够与拖缆相连接,达到固定的效果。
9.优选的,所述拖靶本体的内腔中央位置固定安装有定位器,所述拖靶本体的内腔右侧壁固定安装有电源。
10.通过上述的技术方案,定位器能够有效的对拖靶本体进行定位,方便了解拖靶本体的位置,同时电源能够提供电力,方便拖靶本体内部元件进行工作。
11.优选的,所述安装器的底部中央位置固定安装有摄像头。
12.通过上述的技术方案,安装器上的摄像头能够为拖靶在使用过程中进行侦查和拍摄,提供多方面功能,提高拖靶使用效率。
13.优选的,所述信号处理器的内腔底部中央位置固定安装有信号接收器,所述信号处理器的内腔左右两侧壁中央位置分别安装有无线接收器和红外接收器。
14.通过上述的技术方案,能够通过红外和无线连接的方式进行控制,能够大大的提高拖靶的操控性能,提供多方面控制,便于使用者进行使用。
15.与现有技术相比,本实用新型提供的遥控红外拖靶具有以下优势:
16.1、通过拖靶本体上的平衡尾翼在飞行过程中能够有效的保证了拖靶的平衡性,同时也能够方便使用者对拖靶进行操控。
17.2、通过红外和无线连接的方式进行控制,能够大大的提高拖靶的操控性能,提供多方面控制,便于使用者进行使用。
18.3、通过安装器上的摄像头能够为拖靶在使用过程中进行侦查和拍摄,提供多方面功能,提高拖靶使用效率。
附图说明
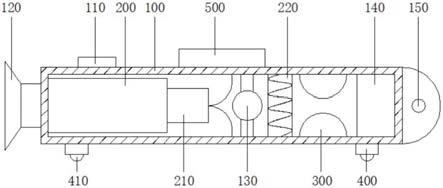
19.图1是本实用新型提供的遥控红外拖靶的立体结构示意图;
20.图2是本实用新型提供的信号处理器的内部结构示意图;
21.图中:拖靶本体100、连接器110、平衡尾翼120、定位器130、电源140、红外信号发生器150、动力舱200、转换器210、控制器220、单片机300、安装器400、摄像头410、信号处理器500、信号接收器510、无线接收器520、红外接收器530。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图1-2 及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.以下结合较佳的实施例对本实用新型的实现进行详细的描述。
24.请参阅图1,本实施例提供遥控红外拖靶,包括拖靶本体100、动力舱200、单片机300、安装器400和信号处理器500。请再次参阅图,所述拖靶本体100 的前侧壁右侧中央位置固定安装有红外信号发生器150,所述拖靶本体100的内腔左侧壁中央位置固定安装有动力舱200,所述动力舱200的右侧设置有定位器 130,所述定位器130的右侧固定安装有控制器220,所述拖靶本体100的内腔右侧顶部和底部均设置有单片机300,所述拖靶本体100的底部左右两侧均固定安装有安装器400,所述拖靶本体100的顶部中央位置固定安装有信号处理器500,所述单片机300和信号处理器500与控制器220电性连接。
25.在使用时,通过信号处理器500对信号进行接收,利用控制器220对信号进行处理控制,再通过单片机300进行操控,利用定位器130对拖靶本体100进行定位,再利用动力舱200提供动力,方便拖靶本体100进行使用。
26.请再次参阅图1,作为本实用新型的一种实施方式,所述拖靶本体100的顶部左侧固定安装有连接器110,所述连接器110与拖缆相连接,所述拖靶本体100 的左侧中央位置固定安装有平衡尾翼120。
27.在使用时,平衡尾翼120能够对拖靶本体100提供平衡,保证飞行,通过连接器110能够与拖缆相连接,达到固定的效果。
28.请再次参阅图1,作为本实用新型的一种实施方式,所述拖靶本体100的内腔中央位置固定安装有定位器130,所述拖靶本体100的内腔右侧壁固定安装有电源140。
29.在使用时,定位器130能够有效的对拖靶本体100进行定位,方便了解拖靶本体100的位置,同时电源140能够提供电力,方便拖靶本体100内部元件进行工作。
30.请再次参阅图1,作为本实用新型的一种实施方式,所述单片机300位于控制器220的右侧且位于电源140的左侧。在使用时,能够对信号进行处理和提供指令,方便使用者操控。
31.作为本实用新型的一种实施方式,所述安装器400的底部中央位置固定安装有摄像头410。这样,安装器上的摄像头能够为拖靶在使用过程中进行侦查和拍摄,提供多方面功能,提高拖靶使用效率。
32.作为本实用新型的一种实施方式,所述信号处理器500的内腔底部中央位置固定安装有信号接收器510,所述信号处理器500的内腔左右两侧壁中央位置分别安装有无线接收器520和红外接收器530。由此,能够通过红外和无线连接的方式进行控制,能够大大的提高拖靶的操控性能,提供多方面控制,便于使用者进行使用。
33.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
34.参照图所示,为本实用新型提供的较佳实施例。
35.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1