1.本公开涉及一种用于多叶准直器的叶片致动器以及包括该叶片致动器的多叶准直器。
背景技术:2.放射治疗装置涉及电离辐射束的产生,通常是x射线或电子束或其他亚原子粒子。它们被导向了患者的癌性区域(例如肿瘤),并且不利地影响癌细胞,从而降低其发生率。束被定界,使得辐射剂量在患者的癌细胞中被最大化并且在健康细胞中被最小化,因为这改善了治疗的效率并且减少了对患者的副作用。
3.在放射治疗装置中,可以使用诸如“多叶准直器”(mlc)的限束设备来定界束。这是一种准直器,它由并排布置成阵列的大量细长薄叶片组成。叶片通常由高原子序数的材料(通常为钨)制成,使得它们对辐射基本不透明。
4.每个叶片是纵向可移动的,使得其前端(或前缘)可伸出到辐射束中或从辐射束中撤出。可撤出所有叶片以允许辐射束通过,或可伸出所有叶片以完全阻挡辐射束。可替代地,在操作极限内,可以撤出一些叶片并伸出一些叶片,以限定任何期望的形状。由此,可以定位叶片前端阵列,以限定准直器的可变边缘。多叶准直器通常由两排该阵列(即叶排)组成,每个叶排从准直器的相对侧伸入到辐射束中。由此,由两个叶排提供的可变边缘将辐射束准直为选定的截面形状,通常是待辐照的靶向肿瘤体积的截面形状。换言之,两个叶排组合以提供用于使辐射束成形的可变形状的孔。
5.各个叶片可以彼此独立地移动,从而通过限定孔的形状来限定辐射束的形状。在一些情况下,叶片一致地移动以通过限定孔的位置而限定辐射束的位置。在使用中,可能需要快速改变孔的形状和/或位置。例如,在一些应用中,实时进行被治疗对象的mri成像,以跟踪待由放射治疗装置辐照的肿瘤的位置。在该情况下,从辐射束的行进方向的视角来看,肿瘤的轮廓可能例如由于患者在治疗期间的运动(例如,由于呼吸)而改变。可以改变多叶准直器孔的形状和位置,使得辐射束的形状和位置跟踪肿瘤轮廓的变化的形状和/或位置。由此,即使当肿瘤移动时,束始终辐照尽可能多的肿瘤,同时辐照尽可能少的周围的健康组织。
6.各个叶片的移动速度对于确保孔的形状和/或位置的变化与肿瘤轮廓的变化的形状和/或位置保持一致是重要的。叶片致动器(即,用于移动各个叶片的装置)在实现合适的叶片速度方面起重要作用。然而,叶片致动器的形式和机构不仅控制速度,而且影响各叶片的定位精度,以及叶片致动器本身的稳定性和耐久性。通常,在一方面的速度和另一方面的定位精度、稳定性和/或耐久性之间会有折衷。
7.期望提供一种具有高速度、高耐久性和高稳定性的精确叶片致动器。
技术实现要素:8.本发明的各方面和特征载于随附的权利要求中。
附图说明
9.以下仅以示例的方式并参考附图描述具体实施例,其中:
10.图1示出了根据现有技术的多叶准直器叶片单元组件;
11.图2示出了根据一实施例的多叶准直器叶片单元;
12.图3示出了根据一实施方式的多叶准直器;以及
13.图4示出了图3的多叶准直器的视图。
具体实施方式
14.多叶准直器
15.一种多叶准直器,包括叶排,该叶排包括多个叶片。叶片在叶排内沿纵向单独地可移动,从而它们可以伸入辐射束的路径和从其伸出。多叶准直器可以具有两个相对的叶排,其中辐射束穿过两个相对的叶排之间的孔。
16.每个叶片被配置为使辐射衰减。多叶准直器的叶片限定了孔的形状。叶片是以堆叠方式并排布置的板状结构,非常类似于一副牌中的牌。叶片可以相对于彼此滑动并且彼此独立地移动,使得当从侧面观察时,“一副牌”(即叶排)在端部具有轮廓,该轮廓由“牌”(即叶片)相对于彼此的位置来限定。辐射束的一部分被叶排阻挡,使得该束呈现与由叶片的位置限定的轮廓相同的形状。
17.叶片在其平面内的形状可以基本上是直线(rectilinear)的。叶片在垂直于束的轴线方向且垂直于叶片的平面的方向上相对较薄,从而允许获得高分辨率的孔形状。叶片在辐射束的轴线的方向上相对较深,以使它们在x射线波长/能量下足够不透明。叶片是相对细长的(在垂直于其厚度和深度的方向上相对长),从而允许它们采用宽范围的位置,同时保持与叶片引导件的接触。叶片包括能够吸收和/或散射x射线的致密材料(高原子序数材料),例如钨。叶片致动器使得单个叶片相对于叶排中的其他叶片移动。
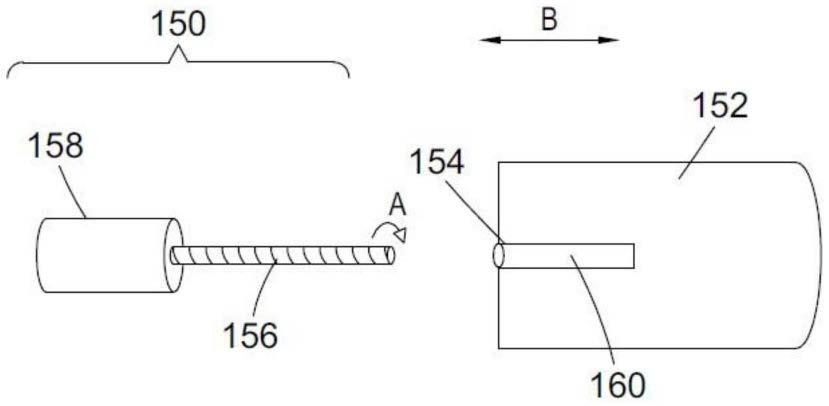
18.图1示出了多叶准直器的叶片152和用于移动叶片152的叶片致动器驱动器150。叶片152和叶片致动器驱动器150在本文被称为“叶片单元”。
19.在包括多个叶片152的叶排中,每个叶片将具有相应的叶片致动器驱动器150。每个叶片致动器154被布置成驱动相应的叶片,使得叶片152可以在它们相应的叶排中彼此独立地移动。也就是说,每个叶片致动器154被布置成在叶排中的一个叶片152和其他叶片之间产生相对线性运动。
20.叶片致动器154包括叶片致动器马达158。通常将提供合适的控制器(未示出),其被设置成向叶片致动器马达158提供信号,以便移动适当的一个或多个叶片152,以提供所需的孔的形状或位置。所有的叶片可以统一地或单独地被驱动。适于监测和控制叶片位置的控制系统确保避免相对的叶排的叶片之间的碰撞。可以进行叶片的移动来限定孔的形状(并且由此限定辐射束),或者相对于辐射束的轴线移动由叶片提供的成形孔。
21.在已知的系统中,每个叶片致动器可以包括叶片致动器螺杆156(例如可旋转的螺纹杆,例如适于爱克米螺杆(acme screw)、滚珠螺杆或导螺杆组件的可旋转的螺纹杆)。叶片152本身作为载荷联接到叶片致动器螺杆156的端部。驱动叶片致动器螺杆的叶片致动器马达158可以是dc马达、dc伺服马达、dc无刷马达、dc无刷伺服马达、ac马达、ac伺服或步进马达。叶片致动器马达在叶片致动器螺杆的与联接到叶片152的端部相对的端部处联接到
叶片致动器螺杆156。
22.在已知的系统中,叶片152通过螺母154与叶片致动器螺杆联接。螺母154与叶片致动器螺杆156螺纹接合。螺母154固定地附接到叶片152,使得螺母围绕其轴线的旋转引起叶片的对应旋转。也就是说,螺母相对于叶片旋转地固定。
23.叶片尾部(叶片152的离叶片前端最远的在叶片端部的部分)可以具有嵌入区域以容纳叶片致动器154的各部分。螺母154包括在叶片尾部中沿着叶片的长度的相当部分延伸的细长孔160。叶片致动器螺杆156通过与叶片致动器螺杆156接合的螺母的内螺纹部分可进入细长孔160。
24.当多个叶片布置在多叶准直器中的一叶排中时,该叶排中的其他叶片旋转地限制叶片152的运动,但允许叶片152在叶片平面内的线性运动。在使用中,叶片致动器螺杆156由叶片致动器马达158旋转(如箭头a所示)。叶片致动器螺杆156与螺母154螺纹接合。然而,螺母不随叶片致动器螺杆旋转,因为叶片尾部旋转地限制了螺母的运动。相反,叶片致动器螺杆156与叶片尾部中的螺纹部分相互作用,以使叶片致动器螺杆的旋转运动转换成螺纹部分的线性运动,并由此转换成叶片的线性运动。叶片致动器螺杆158的旋转沿平行于叶片致动器螺杆轴线的方向并且在叶片平面内驱动螺纹部分,并由此驱动叶片(如箭头b所示)。
25.叶片致动器154的行程可以足以允许叶片的前缘伸出至辐射束路径的至少一半,也允许缩回以离开辐射束的路径。因此,行程可以在根据其设计多叶准直器的辐射束直径的约一半到约两倍之间。行程可以在大约一个叶片的长度的四分之一到大约一个叶片的长度之间。
26.应当注意,在图1中,为了说明的目的,叶片152和叶片致动器螺杆156被示出为分离。在使用中,叶片致动器螺杆156与叶片152上的螺母154螺纹接合。
27.已知的系统使用用于将马达扭矩转换为线性运动以致动叶片的叶片致动器螺杆。然而,这些系统具有某些局限性。
28.传统叶片致动器中速度和精度之间的折衷
29.叶片152的线性速度取决于叶片致动器螺杆156的螺距和叶片致动器螺杆156的旋转角速度。当多叶准直器实时运行以跟踪肿瘤轮廓时,期望叶片速度大于5cm/s。
30.可以通过两种不同的方式实现高的叶片速度:以高rpm旋转叶片致动器螺杆;或制造具有大螺距的叶片致动器螺杆。叶片致动器螺杆是马达的导螺杆。
31.大螺距为导螺杆提供了更高的效率。然而,大螺距的导螺杆具有许多缺点。具有大螺距的导螺杆通常具有多头螺纹并且具有高螺旋角,以实现在导螺杆每完全旋转一次时螺母的大线性位移。然而,如果导螺杆的效率超过50%,则致动器可能会大修或反向驱动。进一步地,在多叶准直器中不期望高的螺距,因为这意味着,在克服重力驱动叶片的台架(gantry)位置,一旦从叶片致动器马达移除动力,叶片就可能失去位置。此外,当使用高螺距叶片致动器螺杆时,更难以精确地定位部件,因为控制系统可以“超越(overshoot)”期望的位置。
32.具有较低螺距的导螺杆通常具有较低的反向驱动倾向,并在一定程度上是自锁的,并且便于以较少的控制系统输入进行更精确的定位。然而,具有较低螺距的导螺杆效率较低。为了实现高线性速度,具有较低螺距的导螺杆需要以较高的旋转速度旋转。当旋转高长径比的导螺杆时(叶片致动器螺杆由于其被设计成适配在单个叶片宽度内而经常具有高
长径比),存在临界旋转速度。当导螺杆达到其临界速度时,它开始振动到不可接受的程度。这增加了磨损(降低了部件寿命),增加了噪声并降低了效率。
33.已知的叶片致动器中的临界速度由于多种因素而受到限制,螺杆无法在不引起损坏的情况下在该限制以上旋转,并且限制了叶片的不会由于振动而引起损坏的最大可能线性速度。
34.临界速度取决于叶片致动器螺杆的长度、直径和支撑轴承构造。
35.叶片宽度(或叶片之间的间距)决定了叶片致动器的部件可用的空间。例如,叶片致动器螺杆156的直径被叶片152的机械宽度限制。根据特定多叶准直器或其应用所需的叶行程来选择叶片致动器螺杆156的长度。支撑轴承构造也受到限制,因为在已知的叶片致动器中,不可能支撑叶片致动器螺杆的端部,该端部必须自由以允许叶片致动器螺杆和叶片之间的相对线性运动。
36.由于上述约束,已知叶片致动螺杆的临界速度(以rpm为单位)受到限制,并且螺杆无法在不引起损坏的情况下在该限制以上旋转。因此,在叶片致动器设计中,在振动程度增加到不可接受的程度之前,叶片的最大可能线性速度也受到限制。
37.新的叶片致动器
38.根据本公开的一实施方式,提供了一种叶片单元,该叶片单元包括叶片致动器,该叶片致动器具有叶片致动器螺杆,该叶片致动器螺杆相对于叶片不可旋转,如下所述。
39.叶片单元具有致动器,该致动器依赖于具有不能相对于叶片旋转或以线性方式移动的叶片致动器螺杆。这可以通过将叶片致动器螺杆刚性地附接到叶片的后部从而使其不能旋转来实现。代替旋转叶片致动器螺杆以使叶片以线性方式移动,而是叶片致动器马达旋转与叶片致动器螺杆上的螺纹接合的另一部件,并相对于该部件推动或拉动叶片致动器螺杆,使得叶片致动器螺杆与叶片一起移动。由此,叶片致动器螺杆的功能是仅提供线性运动,即推动和拉动叶片。
40.在一优选的布置中,叶片致动器螺杆在其一端联接到叶片(例如,叶片尾部),使得其不能相对于叶片旋转。与叶片致动器螺杆上的螺纹接合的螺母或其他可旋转部(例如,蜗杆)被布置成由叶片致动器马达旋转,使得导螺杆(以及由此使得叶片)相对于螺母以线性运动的方式移动。由此,当马达旋转螺母时,叶片致动器螺杆和叶片以线性运动的方式被驱动,使得叶片的前缘移入和移出辐射束的路径。在旋转叶片致动器螺杆的叶片致动器设计中将与叶片尾部联接的螺母(例如,叶片致动器螺杆螺母)现在安装在可旋转管的端部。然后将管联接到马达和齿轮箱组件上。管的长度足够长,使得叶片致动器螺杆可以在管的长度内撤出。
41.图2示出了本公开的一实施方式。叶片单元200包括叶片252和叶片致动器250。叶片致动器包括叶片致动器螺杆256(例如适于导螺杆布置的叶片致动器螺杆)、叶片致动器马达258和可旋转部254。叶片致动器螺杆256在其第一端通过联接部257联接到叶片尾部。联接部257包括具有第一接纳部分和第二接纳部分的小板或垫片(shim),第一接纳部分被布置成接纳叶片致动器螺杆256的第一端,第二接纳部分被布置成接纳叶片252上的突起。叶片致动器螺杆包括外螺纹。
42.叶片致动器螺杆256远离第一端的部分被插入到包括管或套筒的可旋转部262中。当叶片致动器被插入到可旋转部中时,可旋转部包围叶片致动器螺杆256的一个区段。可旋
转部254包括在其内表面上的螺纹部,以与叶片致动器螺杆256的远端部分的至少一部分接合。可旋转部254通过叶片致动器马达258绕叶片致动器螺杆256的轴线可旋转。由于叶片致动器螺杆256在第一端与叶片尾部联接,其不能绕其自身的轴线旋转。
43.在运行中,叶片致动器马达258使可旋转部254围绕叶片致动器螺杆256的轴线旋转(如箭头a所示)。可旋转部254的内表面上的螺纹部分用于将可旋转部254和叶片致动器螺杆256之间的相对旋转运动转换为可旋转部254和叶片致动器螺杆256之间的相对线性运动。叶片致动器螺杆256向叶片252施加力,并且叶片252与叶片致动器螺杆256一起相对于可旋转部254和叶片致动器马达258以线性运动的方式移动。
44.在图2中,为了说明的目的,叶片252和可旋转部254被示出为分离的。在使用中,可旋转部254与叶片252上的叶片致动器螺杆256螺纹接合。
45.图3示出了根据一实施方式的多叶准直器。多叶准直器包括第一叶排310和第二叶排320,两个叶排关于孔彼此相对。在第二叶排中的叶片252处于完全伸出位置。这可以通过叶片的前端之间的对准看出来(叶片252的前端突出到两个叶排之间的孔中)。叶片252的前端比第二叶排320中的所有对准并处于缩回位置的任何其他叶片更进一步地延伸到孔中。第一叶排310中的叶片全部缩回并对准。
46.如叶片252所示,在完全伸出的状态下,叶片致动器螺杆256的大部分长度在可旋转部254之外,叶片致动器螺杆256的最远离第一端的螺纹端仍然与可旋转部254的螺纹部分接合。在该状态下,可旋转部254和叶片252之间的距离为最大。在完全缩回状态下,叶片致动器螺杆256的大部分长度在可旋转部254之内,并且叶片252和可旋转部254之间的距离为最小。
47.在图3中,叶片252处于完全伸出位置,并且导螺杆256是可见的并且未被可旋转部258包围。相对的叶排中的叶片352处于完全缩回状态,并且导螺杆完全被可旋转部包围,使得导螺杆在图3中不可见。
48.在一具体示例中,多叶准直器的孔位于5mm的等中心(iso centre)。多叶准直器具有160个叶片并且叶片宽度为大约1.7mm至2mm。叶片行程为大约100mm。在该示例中,叶片致动器螺杆的直径不超过2mm,并且长度至少为100mm。
49.如图4所示,一系列的六个叶片致动器安装在方形支架410中。
50.支架410包括第一支架部分420,该第一支架部分420具有两个臂422、424和设置在两个臂之间的细长板部分426,以形成构成支架410的正方形形状的三条边的u形。细长板部分426在其中具有一系列440的六个通孔,第一系列440的每个通孔的尺寸被设置成接纳和支撑叶片致动器马达258。第一支架部分420通过施加扭矩阻力以防止马达壳相对于第一支架旋转,从而通过其马达壳来保持每个叶片致动器马达258。第一支架部分420还在叶片致动器马达258的轴线方向上对马达壳施加线性力阻力,以防止马达壳相对于第一支架部分420的线性运动。
51.支架还包括第二支架部分430,其设置在两个臂422,424的端部之间,以形成支架410的正方形形状。第二支架部分430是其中具有第二系列442的六个通孔的细长板,每个通孔其中都具有轴承,该轴承被布置成接纳和支撑叶片致动器的相应的管(可旋转部254)。有利地,支架270的形状为安装在其中的叶片致动器提供了轻而稳定的支撑。进一步有利地,支架为可旋转部提供了稳定性,特别是在高旋转速度下,这增加了最大可能临界速度,并因
此增加了可旋转部254的最大可能效率。支架还有助于降低可旋转部254在所有速度下的噪音和振动,在高速下更是如此。
52.第一系列440的通孔的相应中心与第二系列442的通孔的相应中心对准,从而当叶片致动器安装在支架410中时,每个叶片致动器的叶片致动器马达258和可旋转部424的轴线共线。当结合到叶片单元中时,第二支架部分430定位成比第一支架部分420的细长板部分426更靠近叶片尾部。第一支架部分420通过螺丝可移除地联接到第二支架部分430,该螺丝将每个臂422,424的端部的支脚紧固到第二支架部分430的相应端部。有利地,这允许拆卸支架和容易地去除和更换叶片致动器254以进行维护和修理。
53.如图4所示,可旋转部254形成为在内表面上具有螺纹部分的管。附接到马达258上的可旋转部254具有一系列机加工的狭槽262,这些狭槽262有助于在叶片致动器马达输出轴和可旋转部254之间的柔性联接系统。机加工的狭槽被图案化,使得可旋转部254保持一体地形成为单件部件,因为没有一个狭槽围绕可旋转部254的整个圆周延伸。机加工的狭槽被设置为穿过可旋转部254的壁,使得每个狭槽围绕可旋转部254的圆周的一部分延伸。狭槽在可旋转部254的轴线方向上彼此偏移,并且任何一个狭槽的起始和结束位置都从围绕可旋转部254的圆周方向的那些起始和结束位置偏移。这在马达输出轴和可旋转部254之间的连接中提供了一些灵活性。狭槽允许可旋转部弯曲,使得其轴线不再完全平行于马达输出轴的轴线(即,与之形成锐角)。有利地,可以适应叶片致动器马达安装和叶片/叶片致动器螺杆之间的小的未对准。
54.叶片致动器螺杆可以由任何固体材料制成。特别合适的材料是具有低腐蚀、低磨损、高强度和/或低密度的那些材料。轻而硬的材料是最为合适的。例如,叶片致动器螺杆的材料可以是铝、钢、钛或其任何合金,或是复合材料例如碳纤维复合材料。
55.致动器的控制
56.通常将提供合适的控制器(未示出),其被布置成向叶片致动器250提供信号,以便移动适当的一个或多个叶片252,从而提供所需的孔的形状或位置。如本领域技术人员将理解的,叶片致动器254(特别是叶片致动器马达258)连接到适当的驱动,该驱动用于将来自控制器的步进、速度和/或方向输入转换为致动器电流和电压。
57.在上述实施方式中,马达与其正在驱动的移动线路对准。该设计被称为“直接驱动器”。
58.优点
59.有利地,根据实施例的叶片单元允许高的叶片速度,因为叶片致动器螺杆是旋转静止的。因此,消除了由于叶片致动器螺杆的旋转而引起的叶片致动器螺杆的振动。叶片致动器螺杆仍然可以被制造成适配在叶片的宽度内,因为不需要增加其直径来保持稳定性。可旋转部可以具有比叶片致动器螺杆的直径更大的直径,因为它不受单个叶片的厚度的约束。由于较大的直径,可旋转部具有比叶片致动器螺杆更高的临界速度。因此,可旋转部可以以比叶片致动器螺杆更高的旋转速度运行,而不会达到其临界速度并且不会由于振动而引起损坏。
60.可旋转部的较高旋转速度直接转换为叶片的较高线性速度。因此,对于相同的叶片致动器螺杆螺距,在不妥协叶片致动器的稳定性和耐久性的情况下,较高的叶片速度是可能的。因此,低螺距导螺杆的优点(改进的定位性能和自锁)可以被包含在叶片致动器设
计中。叶片致动器可以具有高旋转速度,并因此提供高叶片速度,而没有前面讨论的限制因素。
61.所公开的叶片单元设计允许更快的叶片速度,而不会遭受上述的关于振动、叶片位置精度或控制系统复杂性的困难。替代的设计具有直接驱动叶片致动器设计的所有优点,但避免了达到临界速度和导螺杆大修的相关问题。
62.因此,在实施例中,叶片致动器提供孔形状和/或位置的快速、准确和可靠的变化。因此,在治疗期间,即使患者(以及由此肿瘤)正在移动,也可以使提供给靶向组织的放射剂量最大化,同时使施加给靶向组织周围的健康组织的剂量最小化。
63.提出了一种用于限定辐射束的多叶准直器或限束设备。多叶准直器包括叶片,限束设备包括本文中描述的多叶准直器中的任何一个多叶准直器。还提出了一种包括所述限束设备的放射治疗装置。
64.还提供了一种驱动本文中描述的多叶准直器的叶片的方法,该方法包括驱动叶片致动器以在至少一个叶排中的叶片之间产生相对线性运动。
65.可以理解,当术语“平行”、“垂直”或“在平面中”用于描述特征和部件的相对布置时,只要它们不影响本文描述的多叶准直器模块的功能和/或运行方面,就允许其有小的偏差。
66.可以以任何合适的方式组合以上方面的特征。应当理解,以上描述仅作为方面的具体实施例,并且许多修改和改变将在本领域技术人员的能力所及的范围内,并且意在被所附权利要求的范围所涵盖。