一种微型战术导弹抗二级发动机推力扰动的控制方法与流程
1.本发明属于制导控制领域,具体涉及一种微型战术导弹的控制方法。
背景技术:
2.微型战术导弹通常是在一级发动机激活之后,制导方法使用比例导引制导方法计算需用过载,然后通过姿态控制方法以及舵机控制方法控制微小型战术导弹飞行。
3.微型战术导弹所使用的二级发动机燃烧时间短、体积小,并且国内没有可以对微小型发动机扰动测量的工具以及设备,无法在试验前测得有效的扰动数据,再者扰动数据本身是一个随机的,方向随机,大小随机,只有在装配好产品之后,每一发的产品的扰动在发射时才是确定的,对每一发产品都测量其扰动数据,然后根据扰动数据设置相应的抗扰算法是不现实的。
4.此外,在某型号的微型战术导弹靶场试验过程中,出现二级发动机点火初始阶段扰动比较大,在某些向下较大扰动作用下导致导弹提前触地等现象。使用传统的比例导引算法已经不能克服扰动带来的影响。
技术实现要素:
5.为克服上述现有技术的不足,本发明的目的是提供一种微型战术导弹抗二级发动机推力扰动的控制方法,主要解决微小型战术导弹二级发动机推力扰动的问题。本发明具有成本低,不需要在微型战术导弹的硬件基础上增加额外的器件以及设备即可增加微小型战术导弹的抗二级发动机扰动的能力。
6.为达到以上目的,本发明通过以下技术方案实现:
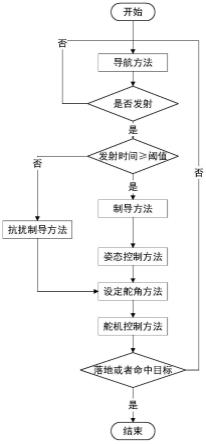
7.一种微型战术导弹抗二级发动机推力扰动的控制方法,包括以下步骤:s101:使用导航方法计算出微型战术导弹的当前姿态、速度、位置信息;s102:如果所述微型战术导弹未发射,则重复步骤s101,直到所述微型战术导弹发射;s103:判断所述微型战术导弹飞行时间是否大于等于阈值;s104:如果所述微型战术导弹飞行时间小于所述阈值,则使用抗扰制导方法计算所述微型战术导弹的第一控制舵角度;如果微型战术导弹飞行时间大于等于所述阈值,则使用制导方法和姿态控制方法计算所述微型战术导弹的第二控制舵角度;s105:根据所述第一控制舵角度或者第二控制舵角度,使用设定舵角方法计算出舵机设定角度;s106:采用舵机控制方法将所述舵机的舵翼偏转到所述舵机设定角度;s107:重复上述步骤s101到步骤s106,直到所述微型战术导弹落地或者击中目标。
8.进一步地,步骤s101中所述当前姿态包括当前姿态角,所述当前姿态角包括当前俯仰角、当前偏航角以及当前滚转角。
9.进一步地,步骤s103中的所述阈值按照下式得到:
[0010][0011]
进一步地,所述步骤s104中使用抗扰制导方法计算所述微型战术导弹的第一控制
舵角度,具体为:(1)根据下式给出所述微型战术导弹的设定角,所述设定角包括俯仰角、偏航角以及滚转角;
[0012]
偏航角=0
[0013]
滚转角=0;
[0014]
(2)根据步骤(1)中的所述设定角以及步骤s101中导航方法计算的所述当前姿态角,计算出所述第一控制舵角度。
[0015]
进一步地,根据步骤(1)中的所述设定角以及步骤s101中导航方法计算的所述当前姿态角,计算出所述第一控制舵角度,具体如下:
[0016][0017]
其中,εn是所述设定角与所述当前姿态角的第n次的偏差,ε
n-1
是所述设定角与所述当前姿态角的第n-1次的偏差,p、d、i是控制参数,t为所述微型战术导弹的控制周期。
[0018]
进一步地,步骤s101中的所述导航方法为:根据惯性测量元件感知的加速度、角速度信息计算出所述微型战术导弹当前的姿态、速度以及位置信息。
[0019]
进一步地,步骤s104中的所述制导方法为:根据所述微型战术导弹的当前姿态、速度、位置信息和目标的位置计算导弹所需要的过载信息。
[0020]
进一步地,步骤s104中的所述姿态控制方法为:根据所述微型战术导弹所需要的过载信息计算出所述第二控制舵角度。
[0021]
进一步地,发射点弹目距离为所述微型战术导弹发射时发射点与目标的斜距。
附图说明
[0022]
图1为本发明实施例一种微型战术导弹抗二级发动机推力扰动的控制方法的流程图。
[0023]
图2为本发明实施例一种微型战术导弹抗二级发动机推力扰动的控制方法的微型战术导弹的弹道曲线仿真图。
[0024]
图3为本发明实施例一种微型战术导弹抗二级发动机推力扰动的控制方法的微型战术导弹的姿态曲线仿真图。
具体实施方式
[0025]
为了使本领域的技术人员更好地理解本发明,下面将结合附图及具体实施例对本发明技术方案进行清楚、完整的描述。
[0026]
请参阅图1,本发明实施例提供的一种微型战术导弹抗二级发动机推力扰动的控制方法,具体包括以下步骤。
[0027]
s101:使用导航方法计算出微型战术导弹的当前姿态、速度、位置信息。
[0028]
具体来说,本实施例的微型战术导弹的弹体上设置有惯性测量元件,该惯性测量元件会实时采集弹体的加速度、角速度信息。同时,该弹体上还设置有控制器,该控制器中执行的导航方法根据上述加速度、角速度信息计算出微型战术导弹的当前姿态、速度、位置
信息。此处的导航方法可以是gps、北斗导航、多元融合导航等,本领域技术人员可以根据实际需要选择合适的导航方法,这里不做具体限定。其中,上述所描述的当前姿态包括当前姿态角,该当前姿态角包括当前俯仰角、当前偏航角以及当前滚转角。
[0029]
s102:如果所述微型战术导弹未发射,则重复步骤s101,直到所述微型战术导弹发射。
[0030]
s103:判断所述微型战术导弹飞行时间是否大于等于阈值。
[0031]
当微型战术导弹发射之后在空中飞行,控制器采集其飞行时间并与阈值进行比较。这里的阈值按照下式进行计算:
[0032][0033]
其中,发射点弹目距离是指发射时发射点与目标之间的斜距。
[0034]
通过设置此阈值,可以根据目标距离调节设定的时间阈值,从而根据弹目距离自适应的控制抗扰制导方法执行的时间。
[0035]
s104:如果所述微型战术导弹飞行时间小于所述阈值,则使用抗扰制导方法计算所述微型战术导弹的第一控制舵角度;如果微型战术导弹飞行时间大于等于所述阈值,则使用制导方法和姿态控制方法计算所述微型战术导弹的第二控制舵角度。
[0036]
需要说明的是,这里根据阈值判断微型战术导弹飞行时间的不同而采用不同的制导方法计算控制舵角度,从而可以根据发射点弹目距离动态的调整时间阈值以及角度阈值,由此实现对目标距离的自适应控制方法。
[0037]
s105:根据所述第一控制舵角度和第二控制舵角度,使用设定舵角方法计算出舵机设定角度。
[0038]
根据抗扰制导方法计算得到的第一控制舵角度,或者制导方法和姿态控制方法计算得到的第二控制舵角度,控制器依照其内的舵机控制方法,将舵翼偏转到所述设定角度,从而让微型战术导弹向目标飞行。
[0039]
s106:采用舵机控制方法将所述舵机的舵翼偏转到所述舵机设定角度。
[0040]
s107:重复上述步骤s101到步骤s105,直到所述微型战术导弹落地或者击中目标。到此完成整个微型战术导弹的飞行控制。
[0041]
在本实施中,上述抗扰制导方法通过以下步骤来实现:
[0042]
(1)根据下式给出该微型战术导弹的设定角,其中设定角包括俯仰角、偏航角以及滚
[0043]
转角;
[0044][0045]
偏航角=0
[0046]
滚转角=0;
[0047]
(2)根据步骤(1)中所述设定角以及步骤s101中所述导航方法计算的当前姿态角,计算出所述第一控制舵角度,具体如下:
[0048][0049]
其中,εn是所述设定角与所述当前姿态角的第n次的偏差,ε
n-1
是所述设定角与所述当前姿态角的第n-1次的偏差,具体地,p、d和i是相应的控制参数,t为所述微型战术导弹的控制周期,这里取值为5ms。
[0050]
在本实施例中,当设定角为俯仰角时,则当前姿态角对应的也为当前俯仰角,计算二者之间的第n次偏差作为εn,因此,上式中的第一控制舵角度即为俯仰角,此时,上式中的参数具体设置如下,p是225.0,i是196.0,d是-29。同样地,当设定角为偏航角时,则当前姿态角对应的也为当前偏航角,计算二者之间的第n次偏差作为εn,因此,上式中的第一控制舵角度即为偏航角,此时,上式中的参数具体设置如下:p是-225.0,i是-201.0,d是30。相应地,当设定角为滚转角时,则当前姿态角对应的也为当前滚转角,计算二者之间的第n次偏差作为εn,因此,上式中的第一控制舵角度即为滚转角,此时,上式中的参数具体设置如下:p是-225.0,i是-194.0,d是1.5。
[0051]
在本实施例中,可以使用pid控制器来实现上述过程,这里不再赘述。
[0052]
不失一般性,在本实施例中,步骤s101中的导航方法、制导方法、姿态控制方法可以采用本领域中常规方法,例如,导航方法可以是根据惯性测量元件感知的加速度、角速度信息计算出所述微型战术导弹当前的姿态、速度以及位置信息,制导方法可以是根据所述微型战术导弹的当前姿态、速度、位置信息和目标的位置计算导弹所需要的过载信息,姿态控制方法可以是根据所述微型战术导弹所需要的过载信息计算出需要的舵机第二控制舵角度。
[0053]
图2为本发明实施例一种微型战术导弹抗二级发动机推力扰动的控制方法的微型战术导弹的弹道曲线仿真图,图3为本发明实施例一种微型战术导弹抗二级发动机推力扰动的控制方法的微型战术导弹的姿态曲线仿真图,在本发明的一个具体实施例中,采用某型号微型战术导弹进行仿真分析,其中,对该微型战术导弹在二级发动机点火时刻分别加0.5nm低头扰动力矩、0.8nm向右侧的扰动力矩,持续时间60ms。使用本发明的控制方法进行控制,导弹按照附图2-3的弹道曲线以及姿态飞行,命中设置的靶标,距离靶心0.275m;而使用未加扰动制导方法的控制方法仿真,该微型战术导弹在二级发动机点火之后距离发射点8m处提前落地,不能命中靶标。
[0054]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1