一种智能对孔机械手及其工作方法与流程
1.本发明涉及矿山、隧道、采石爆破工程装药车对孔装药技术领域,尤其涉及一种智能对孔机械手及其工作方法。
背景技术:
2.在金属非金属矿山采矿、巷道掘进,以及隧道工程等装药爆破施工中,以钻孔、装药、爆破、出渣等方法施工为主,目前仍然以人工装药爆破为主。现有采用装药车辆代替人工装药爆破作业。但是目前现有的装药车辆在对抗作业中,均通过人工操作遥控器对孔,劳动强度大、对孔精度差、效率低、自动化程度低;有的甚至无法可靠的调整对孔角度,或弯曲部分为钢管,导致装药管磨损严重。
3.现有技术如“工业炸药井下现场混装工艺及装备研究”邓声普,《矿冶工程》,第35卷第6期,2015年12月中公开了象鼻式对孔机构,该机构由8个小液压油缸和一套连杆机构,其连杆机构采用的是杆式结构的连接块,因连接块数量较多,使机构安装复杂,运行不灵活,有卡阻现象,累积误差大,精度无法保证,且制作成本较高。
技术实现要素:
4.本发明的目的在于提供一种运行灵活的智能对孔机械手及其工作方法。
5.本发明的技术方案是:一种智能对孔机械手包括支撑臂、装药软管及用于驱动装药软管弯曲的连杆机构,所述连杆机构包括后座、直线机构、斜连板和前座,所述后座连接于所述支撑臂的一端;所述直线机构相对于装药软管的轴心线呈相对设置有两组,每组由依次相连多个所述直线机构形成,位于每组边沿的所述直线机构分别与后座和前座连接;所述斜连板为三角形,分别形成连接点a、连接点b、连接点c和连接点d,所述连接点a、连接点b、连接点c分别位于三角形的边角,所述连接点d位于连接点b和连接点c的连线上;所述斜连板在所述后座和前座之间连接有多个,一个所述斜连板的连接点a与另一个所述斜连板的连接点d铰接,多个所述斜连板的连接点b均与其中一组的直线机构铰接,多个所述斜连板的连接点c均与另一组的直线机构铰接,临近后座的斜连板的铰接点a与所述后座铰接,临近前座的斜连板的连接点b、连接点c和连接点d均与所述前座连接;所述直线机构通过伸长或缩回以驱动所述连杆机构弯曲或伸直。
6.上述方案中,将传动的连接机构中的连杆设计为板状结构,简化减少零件,简化安装结构;另外,板状结构优化为三角形,这种结构的安装方式能够很好的传动,避免卡滞,使机械手运行更加灵活。
7.为了更大范围的扩大机械手对孔时的范围,所述连杆机构、直线机构和装药软管能一同进行0~360
°
旋转;实现全方位可靠对孔,对孔灵活方便。
8.在具体的技术方案中,所述后座通过旋转机构与所述支撑臂连接,所述旋转机构输出的旋转轴心线与所述导向管的轴心线一致。
9.优选的,所述连接点d位于连接点b和连接点c的连线的中心。使斜连板铰接在另一
个的中部,在机械手完全时,传动性更好。
10.优选的,所述智能对孔机械手还包括用于对装药软管起导向作用的导向机构,所述导向机构包括导向管、导轮组件和对孔管,所述导向管设于所述支撑臂的旁侧并与所述后座内部相通,所述对孔管设于所述前座远离后座的一侧,且所述对孔管与所述前座内部相通;所述装药软管穿过所述导向管和对孔管;所述导轮组件设于所述前座和后座之间并沿所述装药软管的轴向设置有多个,多个所述导轮组件分别与对应位置上的所述斜连板铰接;所述导轮组件与所述装药软管的管壁滚动接触。
11.设计导向机构利于装药软管的导入。同时通过滚动接触实现滚动摩擦传递至装药软管上,减少装药软管的磨损,提高装药软管的使用寿命。
12.优选的,所述导轮组件包括导管板、小滚轮和大滚轮,所述导管板在所述装药软管的轴心线上呈相对设置有两个,两个所述导管板之间铰接多个小滚轮,所述大滚轮在所述小滚轮的旁侧设置至少一个,多个小滚轮和至少一个所述大滚轮在所述装药软管的轴心线的两端均有设置,所述小滚轮和大滚轮的轴心线与斜连板上铰接的孔轴心线平行,所述导管板与所述斜连板平行。
13.在同一个导轮组件中,小滚轮设置在临近后座的一侧,大滚轮设置在临近前座一侧,装药软管自小滚轮进入大滚轮输出。装药软管在多个小滚轮的作用下实现稳步位移,在大滚轮的作用下能准确进入下一个导轮组件或从前座输出。连接点b如同关节,是机械手弯曲的节点,在临近连接点b的位置设置大滚轮,在连杆组件弯曲时,导轮组件的大滚轮能对装药软管扭转以适应性弯曲,使整体弯曲程度满足对孔要求。
14.优选的,所述导向机构还包括导管头和前导管,所述导管头设于所述后座内并远离所述导向管设置,所述前导管设于所述前座内并远离对孔管设置,所述装药软管还同时穿过所述导管头和前导管。
15.导管头和前导管对装药软管的位移起到进一步的导向作用。
16.优选的,所述前导管临近导轮组件的一侧设有两个与所述装药软管的管壁滚筒接触的大滚轮,所述大滚轮位于装药软管的轴心线的两侧。利于弯曲成型。
17.优选的,两组所述直线机构中的同组直线机构可同时动作或分别动作。
18.优选的,所述智能对孔机械手还包括用于识别炮眼位置并输出对孔信号的视觉系统,所述视觉系统通过控制系统与所述智能对孔机械手电连接。
19.本发明还提供一种上述智能对孔机械手的工作方法,包括:提供相机和控制系统,通过所述相机对矿山采场、巷道掘进面、隧道掘进面进行拍照,并将照片传输至所述控制系统,所述控制系统通过视觉算法自动识别及定位炮眼位置,所述控制系统将计算结果转成指令输出给所述智能对孔机械手,以驱动所述连杆机构旋转及伸缩,将对孔管对准炮眼;最后将装药软管通过导向机构伸入炮眼的孔底。
20.与相关技术相比,本发明的有益效果为:一、采用视觉系统配合旋转机构、若干直线机构及连杆机构组件、导向机构组件,实现视觉相机对炮眼拍照后发送图形处理及控制系统,通过视觉算法自动识别及定位炮眼的位置,驱动旋转机构及若干直线机构的动作,将对孔管对准炮眼,从而装药软管可通过此基于机器视觉的智能对孔机械手内部的导向机构组件至对孔管,最终送至炮眼底部完成装药作业;提高对孔准确率,提高对孔效率,降低劳动强度、提升对孔装药自动化程度;
二、通过旋转机构及若干直线机构,控制连杆组件的旋转及弯曲角度,可实现前方0~360
°
范围内全方位可靠对孔 ,对孔灵活方便;三、内部小滚轮、大滚轮等组成的装药软管导向机构,在歪曲后,装药软管与减磨材质的小滚轮、大滚轮接触均为滚动摩擦,减少了装药管的磨损,提高了其使用寿命。
附图说明
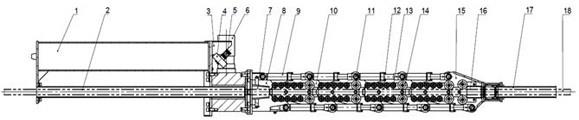
21.图1为本发明提供的智能对孔机械手的正视结构示意图;图2为本发明提供的智能对孔机械手的俯视结构示意图;图3为本发明提供的智能对孔机械手上下弯曲范围示意图;图4为本发明提供的智能对孔机械手左侧视且在旋转机构驱动下旋转范围示意图;图5为本发明提供的智能对孔机械手空间弯曲范围示意图。
22.附图中:1、支撑臂;2、导向管;3、相机保护罩;4、光源;5、工业相机;6、旋转机构;7、导管头;8、后座;9、直线机构;10、斜连板;11、销轴;12、导管板;13、小滚轮;14、大滚轮;15、前座;16、前导管;17、对孔管;18、装药软管。
具体实施方式
23.以下将参考附图并结合实施例来详细说明本发明。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。为叙述方便,下文中如出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用。
24.如图1、图2所示,本实施例提供的一种智能对孔机械手包括支撑臂1、装药软管18、连杆机构、导向机构、旋转机构6和视觉系统。
25.所述连杆机构包括后座8、直线机构9、斜连板10销轴11和前座15。所述导向机构包括导向管2、导轮组件、对孔管17、导管头7和前导管16。
26.所述导向管2设于支撑臂1的旁侧。所述后座8通过旋转机构6安装在所述支撑臂1的一端下侧。所述后座8与导向管2位于同侧且两者内部相通,供装药软管18穿过。所述前座15设于后座8的远离端,两者通过连杆机构相连。
27.所述直线机构9相对于装药软管18的轴心线呈相对设置有两组,每组由依次相连多个所述直线机构9形成,位于每组边沿的所述直线机构9分别与后座8和前座15连接。
28.如图3所示,所述斜连板10为三角形,分别形成连接点a、连接点b、连接点c和连接点d,所述连接点a、连接点b、连接点c分别位于三角形的边角,所述连接点d位于连接点b和连接点c的连线的中心。所述斜连板10在所述后座8和前座15之间连接有多个。一个所述斜连板10的连接点a与另一个所述斜连板10的连接点d通过销轴11铰接。多个所述斜连板10的连接点b均与其中一组的直线机构9通过销轴11铰接。多个所述斜连板10的连接点c均与另一组的直线机构9通过销轴11铰接。临近后座的斜连板10的铰接点a与所述后座8通过销轴11铰接,临近前座15的斜连板10的连接点b、连接点c和连接点d均与所述前座15连接。
29.所述直线机构9为伺服电缸、伺服油缸、滚珠丝杠机构、直线模组等任意一种。在精度要求不高时,还可以采用普通气缸或普通油缸。上述每个铰接点均是一个可弯曲的关节
点,通过直线机构9的伸缩以驱动其弯曲或伸直,弯曲时能实现上下180
°
对孔角度。可根据实际需要灵活增加斜连板10的数量,以获得更长的工作半径及更紧密的弯曲角度。
30.在具体操作中,两组所述直线机构9中的同组直线机构9可同时动作或分别动作。若安装在上方的直线机构9同时缩回,安装在下方的直线机构9同时伸出,则整个连杆机构可向上弯曲,反之则向下弯曲。若上下直线机构9按控制要求按上下两组分别伸出与缩回(即同组内的直线机构分别伸出或缩回),可实现“s”形弯曲形状,以避开某些障碍物,达到仿生象鼻或蛇形机械手的柔性弯曲功能。
31.如图1、图2所示,所述对孔管17设于所述前座15远离后座8的一侧,且所述对孔管17与所述前座15内部相通。所述导管头7设于所述后座8内并远离所述导向管2设置。所述前导管16设于所述前座15内并远离对孔管17设置,所述装药软管18依次穿过所述导向管2、导管头7、导轮组件、前导管16和对孔管17 ,并伸出所述对孔管17的外侧。所述导管头7和对孔管17均为锥管,锥管的大口径端朝向后座8设置,使装药软管18穿行无阻。
32.所述导轮组件设于所述前座15和后座8之间并沿所述装药软管18的轴向设置有多个。
33.所述导轮组件包括导管板12、小滚轮13和大滚轮14。所述导管板12在所述装药软管18的轴心线上呈相对设置有两个,两个所述导管板12之间铰接多个小滚轮13。所述大滚轮14在所述小滚轮13的旁侧设置一个。多个小滚轮13和一个所述大滚轮14在所述装药软管18的轴心线的两端均有设置。所述小滚轮13和大滚轮14的轴心线与斜连板10上铰接的孔轴心线平行,所述导管板12与所述斜连板10平行。所述小滚轮13和大滚轮14中的“小”“大”是指根据该两个滚轮之间的相对大小进行的定义。
34.装药软管18在导向机构中与小滚轮13、大滚轮14接触均为滚动摩擦,且小滚轮13、大滚轮14均采用尼龙、聚氨酯、聚四氟乙烯或其他非金属减磨材料制作,能减少了装药软管18的磨损。
35.所述旋转机构6为可输出紧密转角的伺服转台、回转支撑、电动转台中的任意一种,可输出0~360度旋转角度,所述旋转机构6输出的旋转轴心线与所述导向管2的轴心线一致,以使位于前方的连杆组件和对孔管17沿导向管2的轴心线进行0~360
°
旋转(如图4所示)。
36.所述视觉系统包括相机保护罩3、光源4和工业相机5。所述工业相机5和光源4安装在支撑臂1的旁侧且位于导向管2的上方。在所述工业相机5的上方设置相机保护罩3。
37.本发明还提供一种上述的智能对孔机械手的工作方法,包括:所述光源4和工业相机5与图像处理及控制系统(未图示)电性连接,共同组成视觉系统。工作时光源4和工业相机5对矿山采场、巷道掘进面、隧道掘进面进行拍照,将照片传输至图形处理及控制系统,通过系统视觉算法自动识别及定位炮眼位置。在所述图像处理及控制系统的调控下,控制旋转机构6及各直线机构9的输出转角及伸缩距离,从而控制整个基于机器视觉的智能对孔机械手的弯曲与伸直及在空间的角度(如图5所示)。将对孔管17对准炮眼,实现对孔动作,可覆盖以旋转机构6旋转面为圆心,弯曲后对孔管17最上方尺寸至中心线(即导向管2的轴心线)距离为半径的前方0~360
°
,半球范围。最后将装药软管18通过导向机构伸入炮眼的孔底,注入炸药。
38.本发明采用视觉系统对炮眼拍照,自动识别并定位炮眼位置,控制并驱动连杆机
构实现自动对孔作业,以提高对孔效率、降低工人劳动强度、提高对孔精度、提高了整个对孔作业自动化程度,并在弯曲的对孔导向机构中装药软管与大小滚轮均为滚动摩擦,以减少装药管的磨损,提高装药管的使用寿命。
39.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1