辅助枪瞄外挂系统和激光模拟枪的制作方法
1.本技术涉及瞄准射击领域,尤其涉及一种辅助枪瞄外挂系统和激光模拟枪。
背景技术:
2.目前在实战演习或城市安全维护工作中,巷战是常见的一种方式,战争伤亡率也是相当高的。在巷战中,街道的拐角、死角较多,人的眼睛无法直接看到,如过探头观察,会有被击中的危险。
3.现有一种巷战手枪,在枪上安装一个摄像头,人躲在建筑物后面,伸出枪体用摄像头获取图像。但是这种方法拍摄的图像角度不全面、不能辅助单兵搜索目标,也无法通过拍摄图像较精确的报出敌人的方位。
技术实现要素:
4.为解决上述问题,本技术提供一种辅助枪瞄外挂系统,包括:摄像组件,所述摄像组件包括多个的摄像头,其中有一个a摄像头与枪口方向一致且位于枪管的正上方或正下方,所述多个摄像头分布在平面内一个圆的圆周形成摄像阵列,并且所述摄像阵列被配置为可视视角至少覆盖从枪口正前方向左右各90
°
;方向识别模块,用于识别方位;控制模块,与摄像组件、方向识别模块连接,接收和处理所述摄像组件与所述方向识别模块的数据,判断图像中的目标位置;显示模块,与控制模块连接,用于显示控制模块传递的信息。
5.采用上述技术方案,摄像组件可以多角度的获取图像,隐蔽观察巷战中拐角视野,控制模块结合摄像组件与方位识别模块传递的数据可以识别图像中目标的方位,使单兵在显示模块可以看到目标图像和方位,提高了侦察效率;同时a摄像头位于枪口正方向,可作为瞄准镜,实现短距离作战人枪分射击,提高作战安全性。
6.第一种可能实现的方式,所述摄像阵列以a摄像头为基准,绕圆心向顺时针方向转动nm为摄像头rn,向逆时针方向转动nm为摄像头ln,r与l的夹角为k,其中k 》 0,0
°
》m》180
°
n≥1,所述摄像头的可视角度大于m。
7.采用上述技术方案,以枪口方向的a摄像头与圆的连线为界对称扇形等角度排布摄像头阵列,获取单兵左右、前以及右后、左后的图像,按摄像头排列角度拼接为全景图,便于观察。
8.第二种可能实现的方式,所述摄像组件安装于固定架,所述固定架内侧设有垫层,所述垫层包括隔热层和缓冲层。
9.采用上述技术方案,可以将所有摄像头按阵列位置排布在固定架上,易拆卸,能缓冲射击产生的后坐力和热量。
10.第三种可能实现的方式,所述控制模块判断图像中的目标位置包括:获取所述摄像头图像,将所述图像拼接为全景图像;获取所述目标图像;获取摄像组件每个摄像头的方位,所述方位标记在所属的摄像头图像中心,将所有图像按摄像头角度拼接为全景图像;根据方位精度补充所述全景图像的方位标记;识别目标与摄像头的距离,在所述全景图像中
以摄像组件为极点、某一方向为极轴标记目标坐标。
11.采用上述技术方案,可以为单兵提供一个具有方向标记的全景图像,在图像中标有目标位置,使战场态势一目了然,提高与队友之间情报传递的精准度。
12.第四种可能实现的方式,所述识别目标与摄像头的距离包括:识别目标身体部位;获取在所述肢体姿势下人体尺寸或此身体部位的尺寸;获取摄像头焦距、图像像素尺寸;计算所述目标到摄像头的距离。
13.采用上述技术方案,以目标的身体特征为参考尺寸,通过焦距、参考尺寸、原始像素尺寸以及图像中拍摄的目标的尺寸(以像素计)估算目标与摄像头的距离,从而得到目标的距离。误差较小、计量方便。第五种可能实现的方式,所述显示模块为数字显示屏幕或vr显示设备。
14.采用上述技术方案,vr显示战场态势的全景图像,并标记有方位角,还原周边环境的方向,单兵更直观感知地势及目标的位置。
15.第六种可能实现的方式,所述控制模块可无线连接多个的所述显示器,将数据同时发送到所述显示器。
16.采用上述技术方案,使用单兵可以向队友更直观的共享周边态势和目标情况,无需对讲或发送信息,可以保持注意力,且使情报传递时效性更性强。
17.第七种可能实现的方式,所述辅助枪瞄外挂系统可以调整为侦察模式和瞄准模式,当目标出现在a摄像头的图像中心,进入瞄准模式,a摄像头在所述瞄准模式下可自动调整焦距,所述显示模块仅显示a摄像头的图像。
18.采用上述技术方案,外挂系统可辅助单兵侦察敌情和瞄准射击,在瞄准模式下,识别到目标出现可自动拉进图像,便于单兵瞄准,可以代替瞄准镜瞄准射击。对于距离较近、环境较简单的目标无需探头开枪,实现人枪分离射击,有效保护了单兵的生命安全,增强单兵作战能力。
19.第二方面,一种激光模拟枪,包括激光发射器和电路板,其特征在于,所述激光模拟枪安装有上述的辅助枪瞄外挂系统。
20.一种可能实现的方式,所述辅助枪瞄外挂系统的控制模块与所述电路板连接,当识别目标出现在所述a摄像头的图像中心时,所述控制模块向电路板传递信号,电路板控制所述激光发射器发射激光。
21.采用上述技术方案,外挂系统可以辅助单兵在训练或演习中的侦察和瞄准,外挂系统与激光模拟枪连接,为激光模拟枪增加目标识别和自动射击功能,辅助单兵数字化作战。
22.附图说明
23.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
24.图1为本技术一实施例外挂系统结构示意图;
图2为本技术一实施例外挂系统摄像组件结构示意图;图3为本技术一实施例外挂系统摄像阵列示意图;图4为本技术一实施例判断图像中目标位置方法流程图。
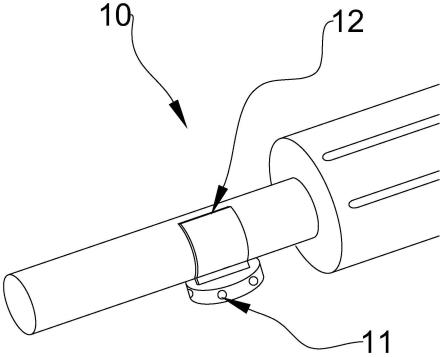
25.附图标记说明:10、摄像组件;11、摄像头;12、固定架;13、垫层;20、控制模块;30、方位识别模块;40、显示模块。
具体实施方式
26.本技术目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
27.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.需要说明,本技术实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
29.另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
30.本实施例的外骨系统将摄像头排列成多角度的摄像阵列,可以观察各个方向,减少视野盲区,获取的图像拼接为具有方向标记的全景图像,可计算目标的位置,在全景图像中标记。且具有侦察和瞄准两种模式,近距离作战辅助单兵人枪分离射击。相对于现有的方案,可较精准的识别目标、可隐蔽性强、侦察态势更直观。
31.参照图1,图1是本技术一实施例辅助枪瞄外挂系统的结构示意图。
32.本实施例的辅助枪瞄外挂系统应用于近距离的枪械或模拟枪械,包括控制模块20,以及分别与控制模块20连接的摄像组件10、方位识别模块30、显示模块40。另外,外挂系统还包括电源,为整个系统供电。控制模块20获取方位识别模块30与摄像组件10的数据,经处理后发送到显示模块,辅助单兵隐蔽自己侦察和瞄准射击。
33.具体的,摄像组件10设置于枪管,与控制模块20连接。显示模块40可以是数字屏幕,例如可直接显示在单兵终端,或者ar显示设备,例如转动连接在头盔的ar眼镜。控制模块20无线通信连接多个显示模块40,可同时向多名队友分享情报。方位识别模块30可以是陀螺仪,与控制模块20电连接,用于识别枪口方向并传递控制模块20。
34.参照图2,图2是本技术一实施例摄像组件10结构示意图。摄像组件10包括多个摄像头11和固定架12,固定架12包括构造为圆形或多边形的几何体以及夹持结构,几何体沿其周向开设有卡槽,用于安装摄像头11,夹持结构用于将固定架12可拆卸安装在枪管上。
35.具体的,夹持结构可以是夹钩,内侧与枪管的接触面设有垫层13(图中未示出),垫层包括隔热层和缓冲层,例如隔热棉、海绵弹力胶等材料,缓冲射击产生的后坐力和热量,保护固定架12。
36.摄像头11位于固定架12几何体的卡槽内,其中a摄像头11位于枪管的正上方或正下方,与枪口方向一致,并且a摄像头11与其他摄像头11分布在平面内一个圆的圆周形成摄
像阵列,摄像阵列的视角至少覆盖从枪口正前方向左右各90
°
。
37.本领域技术人员应当知道摄像头11可根据景深、视角需求选择合适焦距,在此不做限制。例如针对近距离、视野不空旷的巷战,可选择摄像头11的焦距为35mm-70mm,单个摄像头11的视角为34
°‑
63
°
。
38.参照图3,图3是摄像阵列的其中一个示意图。
39.作为一种示例,以所述a摄像头11为基准,绕圆心向顺时针方向转动nm放置摄像头rn,向逆时针方向转动nm放置摄像头ln,r与l的夹角为k,其中k 》 0,0
°
》m》180
°
n≥1,所述摄像头的可视角度大于m。
40.具体的,若n=2、m等于45
°
、摄像头11的视角为50
°
,以圆心为旋转点、以a摄像头11为基准顺时针转动45
°
的位置为r1摄像头, 转动90
°
的位置为r2摄像头;逆时针转动45
°
位置为l1摄像头, 转动90
°
的位置为l2摄像头,l2与r2的夹角k=180
°
,摄像阵列的整体可视角度为230
°
。
41.摄像阵列的整体视角大于180
°
,可灵活调整焦距,可查看多个角度的清晰图像,调整m或n,当摄像阵列的整体视角更大,在侦察敌情的同时,还能防范后方有人偷袭。
42.单兵在巷战或其他短距离作战的场景中,隐蔽在建筑物内,探出枪管便可侦察敌情,摄像组件10获取可视角度下的图像,方位识别模块30实时判断a摄像头的方向,根据已知m得到所有摄像头11的方向。由于每个方向的摄像头11拍摄的图像不同,按照拍摄方向将每个图像拼接为全景图像,由此推断图像中目标的位置。
43.作为一种示例,可以以摄像组件10为原点、以某一方向为极轴,用极坐标表示目标位置。那么需要得到目标相对于摄像头的方向和距离。
44.具体的,可参照图4,图4是本技术一实施例判断图像中目标位置方法流程图,可包括步骤:s11、获取所述目标图像。目标是指在侦察过程中发现有移动物体,可以是识别物体在同一摄像头的同一焦距下、不同时间的拍摄画面中位置不同。
45.s12、获取摄像组件每个摄像头方位,所述方位标记在所属的摄像头图像中心,将所有图像按摄像头角度拼接为全景图像。在每幅图像中心点标记拍摄此图像摄像头的方位数据。再次参照图3的示例,a、l1、l2、r1和r2可同步变焦,使在侦察不同范围时所有图像等比例且有重合部分,便于图像之间的拼接和融合,得到清晰的全景图像。
46.作为一种示例,图像拼接融合可以基于sift算法提取相邻图像的特征点,采用优先搜索算法查找最近相邻特征点,找出最佳匹配特征点集,最后用ransac算法估算投影变换矩阵。
47.s13、根据方位精度补充所述全景图像的方位标记。
48.例如可设置方位标记精度为10
°
,若此时a摄像头朝向正北,r1图像中心点标记为45
°
北偏东,r2图像中心点标记为90
°
东,l1图像中心点标记为45
°
北偏西,l2图像中心点标记为90
°
西,以10
°
的精度补充标记中心点之间的方位角度。
49.s14、识别目标与摄像头的距离,在所述全景图像中以摄像组件为极点、某一方向为极轴标记目标坐标。
50.作为一种示例,通过目标的真实尺寸、在图像中的尺寸、原始像素尺寸以及焦距的关系识别目标与摄像头距离。方法为:识别目标身体部位,获取在此身体部位的标准尺寸;
获取摄像头焦距、原始像素尺寸,计算目标在图像中的尺寸;计算所述目标到摄像头的距离。
51.具体的,例如捕捉到目标整体,系统记录成年人标准身高为170,焦距为50mm,根据图像原始像素尺寸为640*480,得到目标在图像中的像素尺寸。以标准身高170和图像身高得到比例作为参考,最后根据比例得到目标与拍摄点的大致距离,比如图像的exif信息便可显示拍摄距离。
52.作为一种示例,得到目标与拍摄点的距离和角度之后,以摄像组件为极点、指定正东方向为极轴标记目标坐标。若目标在全景图像中标记方位为45
°
北偏东,与摄像组件10的距离为20m,那么目标的坐标为(45
°
,20)。
53.应当理解,所述目标标记方法仅是为了便于使用单兵在全景地图中查看方便,目标的坐标也可以以单兵的gps定位为参考,转换为在地图中的定位,将目标定位信息发送到队友或指挥终端。
54.全景图像的高效共享有效的解决了战场中信息传递失真,不再需要队友对讲转述或者手势传递;在发现敌情时,也可借助队友视角进一步观察。图像间隔一定时间更新便可得到全景视频,单兵在显示模块40随时查看周围情况,不需要探出身体,提高了作战的安全性;图像中详细的标记空间的方位以及目标的坐标,满足单兵在身体完全隐蔽的情况下直观的查看敌情、精准报点。
55.另外,辅助枪瞄外挂系统还具有瞄准模式,当识别有移动目标出现在a摄像头的图像中心,进入瞄准模式。a摄像头在瞄准模式下可自动调整焦距,拉进目标图像,显示模块仅显示a摄像头。
56.进一步的,控制模块20记录移动目标的特征,若单兵没有击中目标,当目标第二次进入a摄像头的画面范围,且出现时间达到预设阈值,则向单兵发出提示,例如标点闪烁或声音提醒,单兵可在显示模块40瞄准目标射击。
57.另外,本技术还提供一种激光模拟枪,激光模拟枪安装上述辅助枪瞄外挂系统,用于单兵在训练或演习中的射击。单兵演习常用模拟训练系统,训练系统会配置有vr显示等设备,这时外挂系统的显示模块40可以单兵的vr眼镜或vr头盔,单兵在隐蔽情况下转动头部便可实景观察建掩体外的情况。
58.进一步的,外挂系统的控制模块20与激光模拟枪的电路板连接,当控制模块20识别目标出现在a摄像头的图像中心时,控制模块20向电路板传递信号,电路板控制激光发射器发射激光,模拟自动开枪。
59.具体的,若有移动物体出现在a摄像头的画面中心,a摄像头自动变焦,拉近图像,目标图像较清晰时,向电路板发送信号,控制激光射出。
60.应当理解,本技术中的控制模块20与激光模拟枪的连接可以是直接连接,或者通过单兵终端连接,当然本技术的控制模块20可以是一种芯片、处理器或终端设备,也可以是结合与单兵终端中的一种芯片或处理器的一个功能模块,或写在单兵终端的一种程序。本技术的显示模块40可以是与控制模块20连接的数字化显示终端、ar或vr显示设备,也可以是单兵终端。
61.本说明书中使用的术语“单元”、“模块”等,可用于表示计算机相关的实体、硬件、固件、硬件和软件的组合、软件、或执行中的软件。
62.本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各种说明性逻辑块(illustrative logical block)和步骤(step),能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同巡防方法来实现所描述的功能,但是这种实现不应认为超出本技术的范围。在本技术所提供的几个实施例中,应该理解到,所揭露的装置、设备和方法,可以通过其它的方式实现。
63.本技术模块或单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,多个单元或组件可以结合或者可以集成到另一个系统。或一些特征可以忽略,或不执行,例如。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
64.该作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
65.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1