一种基于电磁弹射辅助驱动一级气体炮的弹道靶的制作方法
本技术涉及超高速飞行地面模拟试验的,特别是一种基于电磁弹射辅助驱动一级气体炮的弹道靶。
背景技术:
1、弹道靶是一种实现气动试验模型在静止气体中自由飞行的空气动力学地面试验设备,可以模拟真实飞行流动条件,用于开展气动力/热、气动物理、超高速碰撞等试验测试。基于模型飞行地面模拟试验的尺度效应,在其它条件相同情况下,模型尺寸越接近飞行器原型尺寸,地面模拟数据结果越接近真实。相同发射速度条件下,发射装置口径越大、模型尺寸越大,模拟试验效果越好。
2、弹道靶主要由模型发射装置、试验系统和测控系统组成。弹道靶发射装置动力源通常为火药、压缩气体或者氢氧爆轰等方式,结构上主要有一级炮、二级轻气炮、三级轻气炮等构型,尤以火药驱动的二级轻气炮最为常见。二级轻气炮最高可以将弹丸加速到8km/s,但发射管口径通常在50mm以下(最大不超过210mm);三级轻气炮最高可以将弹丸加速到约11km/s,但发射管口径通常在20mm以下。目前二/三级轻气炮均无法满足超高速(8km/s及以上)状态下大尺寸(口径50mm以上)模型飞行地面试验需求。
3、相比于二/三级轻气炮,一级炮口径通常可达50mm以上,相同发射速度条件下,可实现更好的地面模拟试验效果。火药、氢氧爆轰等方式存在安全性差、污染环境、政策管制等问题,造成应用受限;而高压气体驱动方式安全清洁,但其初始注气压力受到注气设备能力的限制,还存在弹丸发射后弹底压力迅速降低的固有问题,无法为弹丸提供较高的平均压力,内弹道性能不佳,驱动能力较弱。总之,由于传统动力源驱动能力不足或者安全性等原因,一级炮发射速度一般不超过2km/s。
4、因此,超高速弹道靶亟需兼具强驱动力、高安全性、优良内弹道性能的新型动力源。线圈型电磁弹射装置具备电磁线圈多级轴向分布、分级模块化赋能、单级独立可调的特点,能够实现优良可控的内弹道性能。中国专利公开号cn108759559a,公开日2018年11月6日,发明创造的名称为:一种二级轻气炮,该申请公开了一种首级驱动采用电磁炮的二级轻气炮,比火药驱动、混合气体爆轰等方式安全性更高,比高压氮气驱动占地空间小、发射速度高,但由于属于二级轻气炮结构,虽然可实现较高的发射速度,但其不足之处是发射管口径较小(如:其实施例发射管管径仅为14mm),试验模型的尺寸和质量均较小,无法满足大尺寸模型超高速飞行模拟试验需求。
技术实现思路
1、本发明为解决现有弹道靶发射装置驱动能力弱、口径小及内弹道性能不理想等问题,发掘电磁弹射装置驱动方式的潜力,提供一种高压气体和电磁弹射复合驱动一级炮作为发射装置的大口径弹道靶,保证在超高速发射条件下提升试验模型尺寸,同时改善内弹道性能,为气动力/热、气动物理和超高速碰撞等试验提供安全、清洁、高效、可控的大口径试验平台。
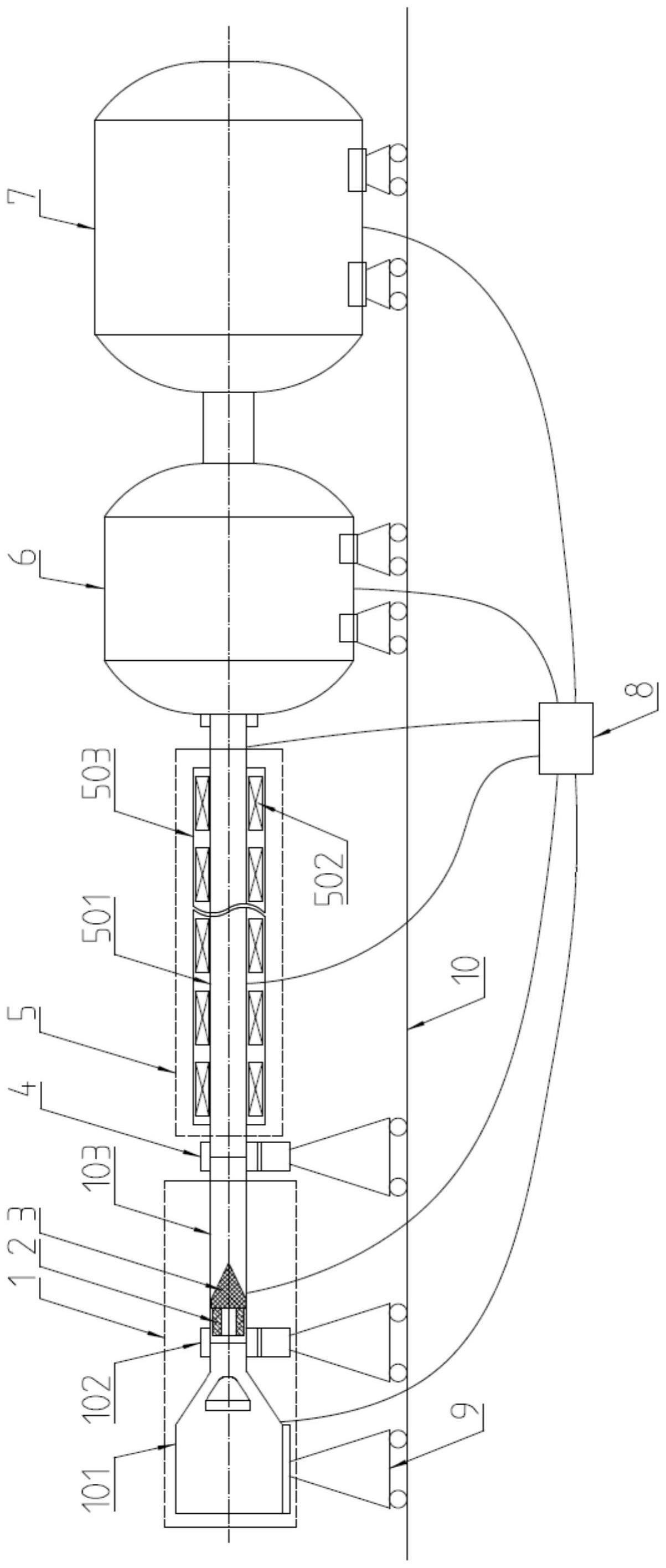
2、第一方面,提供了一种基于电磁弹射辅助驱动一级气体炮的弹道靶,用于执行模型的飞行测量,所述弹道靶包括高压气体推进段、电枢、模型、电磁弹射装置、膨胀箱、试验舱及测控系统;其中,
3、所述高压气体推进段包括高压气室、高压气体炮管,所述高压气体炮管内置有所述电枢和所述模型,所述电枢在所述模型后方;
4、所述电磁弹射装置包括电磁发射管、缠绕在电磁发射管上的多级驱动线圈、为多级驱动线圈供电的激励电源和为激励电源充电的充电机,所述高压气室、所述高压气体炮管、所述电磁发射管、所述膨胀箱和所述试验舱依次连接;
5、所述高压气室释放出气体,驱动电枢和模型向前运动飞出所述高压气体炮管,在电磁发射管内,所述电枢在气体推力和电磁力的复合驱动下推动模型,所述模型飞出所述发射管经过所述膨胀箱进入所述试验舱;
6、所述测控系统用于根据所述电枢的移动速度和位置,确定每级激励电源触发的时刻。
7、结合第一方面,在第一方面的某些实现方式中,所述高压气体推进段满足以下至少一项:
8、所述高压气室内的气体为空气或氮气或氦气,并且气体压力不大于30mpa;
9、所述高压气室通过法兰结构或者开口锯齿螺纹结构与所述高压气体炮管相连;
10、所述高压气室内气体释放后所述高压气室内气体总压p1x和总温t1x的表达式为:
11、
12、其中,γ1为气体比热比,p10为气体初始压力,t10为气体初始温度,v10为气体初始体积,x为电枢运动的距离,d为电磁发射管内径,v1x(x)为电枢运动x距离时气体体积;
13、所述高压气室包括释放机构,所述释放机构为活塞式释放机构或者双破膜式释放机构;
14、所述高压气体炮管容积与所述高压气室容积之比≥1.0;
15、所述高压气体炮管为炮钢材料。
16、结合第一方面,在第一方面的某些实现方式中,所述电磁弹射装置满足以下至少一项:
17、所述电磁发射管为树脂基复合材料或陶瓷材料,最高工作温度可达260摄氏度;
18、所述电磁弹射装置的多级驱动线圈级数为n,n≥3;
19、所述各级驱动线圈及激励电源的结构参数、电磁参数均相同;
20、每级驱动线圈长度与电磁发射管内径之比为0.4~1.7;
21、相邻级驱动线圈相邻端面间距与电磁发射管内径之比为0.1~0.3;
22、所述电磁弹射装置驱动线圈导体采用紫铜材料,驱动线圈导体外部被绝缘材料包覆;
23、所述多级驱动线圈外部整体被金属层包覆。
24、结合第一方面,在第一方面的某些实现方式中,所述激励电源包括储能脉冲电容器组、主开关、续流开关;所述储能脉冲电容器组与所述主开关串联,并与所述续流开关并联连接在所述驱动线圈的两端,所述储能脉冲电容器组的两端还通过充电开关连接在所述充电机的两端,所述主开关和所述充电开关的导通、断开均通过所述测控系统控制。
25、结合第一方面,在第一方面的某些实现方式中,所述激励电源满足以下至少一项:
26、所述储能脉冲电容器组由金属化膜自愈式脉冲电容器组合而成,金属化膜自愈式脉冲电容器的能量体积比大于或等于0.5mj/m3,工作寿命大于或等于1000次;
27、所述主开关为火花间隙开关或者由半导体晶闸管组成的高压开关;
28、所述续流开关由半导体高压二级管组合而成。
29、结合第一方面,在第一方面的某些实现方式中,所述测控系统包括中央控制器、脉冲触发电路和电枢测速装置;
30、所述电枢测速装置包括光电传感器本体和多个光电探头,所述多个光电探头沿所述电枢的运动方向间隔安装于所述高压气体炮管、所述电磁发射管壁上,所述光电传感器本体与所述光电探头通过光纤连接;
31、所述光电探头通过所述高压气体炮管、所述电磁发射管管壁上的通孔向所述电枢发出脉冲光信号并接收反射的光信号,所述光电传感器本体将光信号转换为电信号并传送给所述中央控制器;
32、所述中央控制器处理电信号得到所述电枢通过所述光电探头处的时刻和速度,并根据时序触发控制方法解算得到待触发级的预计触发时刻;
33、在所述预计触发时刻,由所述中央控制器向所述脉冲触发电路发出触发控制信号,由所述脉冲触发电路输出功率脉冲触发导通待触发级激励电源,使待触发级激励电源的储能脉冲电容器组通过驱动线圈放电。
34、结合第一方面,在第一方面的某些实现方式中,所述光电探头用于对所述电枢的后端进行检测。
35、结合第一方面,在第一方面的某些实现方式中,从第1级驱动线圈中心线沿轴向向后均匀设置至少m个光电探头gf1、gf2、…、gfi-1、gfi、…、gfm-1、gfm,第1个光电探头gf1与第1级驱动线圈中心线轴向间距为h/2,相邻光电探头轴向间隔均为h,所述电枢在电磁发射管内第1级驱动线圈中心线处速度为vza,tm为驱动线圈放电电流从零上升至最大值时的时间间隔;
36、从第1级驱动线圈中心线沿轴向向前均匀设置至少n个光电探头gz1、gz2、…、gzj、gzj+1、、…、gzn-1、gzn,第1个光电探头gz1位于第1级驱动线圈和第2级驱动线圈之间的管壁上,第1个光电探头gz1与第1级驱动线圈中心线间距,同第1个光电探头gz1与第2级驱动线圈中心线间距相等,相邻光电探头轴向间隔均为h。
37、结合第一方面,在第一方面的某些实现方式中,
38、结合第一方面,在第一方面的某些实现方式中,tm根据确定,ld为驱动线圈放电电流经二级管续流之前的放电回路所有自感之和,c为储能电容器组电容值。
39、结合第一方面,在第一方面的某些实现方式中,所述时序触发控制方法包括:
40、步骤1:所述高压气室释放出气体驱动所述电枢推动所述模型向前运动;
41、步骤2:令s=1,当电枢运动经过第1级驱动线圈中心线后方第m个光电探头时,i=m,循环执行以下步骤2-1、步骤2-2,直到触发第1级激励电源:
42、步骤2-1:当电枢运动经过第1级驱动线圈中心线后方第i个光电探头时,电枢与第1级驱动线圈中心线距离为lfi1=(i-1/2)h,通过电枢测速装置执行测量、中央控制器进行信号处理,得到此时刻和此位置电枢速度vfi;
43、步骤2-2:
44、如果则在延迟时间δt1后触发第1级激励电源,所述延迟时间δt1满足:令s=s+1,令i=i-1,跳转出本循环执行步骤3;
45、如果则不准备触发任何激励电源,令i=i-1;
46、步骤3:循环执行以下步骤3-1、步骤3-2,直到电枢经过第1级驱动线圈中心线后方第1个光电探头,并通过第1级驱动线圈中心线;
47、步骤3-1:当电枢运动至第1级驱动线圈中心线后方第i个光电探头时,电枢与第s级驱动线圈中心线距离为lfis=(i+s-3/2)h,通过电枢测速装置执行测量、中央控制器进行信号处理,得到此时刻和此位置电枢速度vfi;
48、步骤3-2:
49、如果则立即触发第s级激励电源,令s=s+1,令i=i-1;
50、如果则在延迟时间δts后触发第s级激励电源,所述延迟时间δts满足:令s=s+1,令i=i-1;
51、如果则不准备触发任何激励电源,令i=i-1;
52、步骤4:当电枢通过第1级驱动线圈中心线,并运动至第1级驱动线圈中心线前方第1个光电探头gz1时,触发导通第s级激励电源,此时刻为ts,电枢与第1级驱动线圈中心线间距为xs=h/2;通过电枢测速装置执行测量、中央控制器进行信号处理,得到ts时刻此位置电枢速度vs;
53、步骤5:循环执行以下步骤5-1、步骤5-2和步骤5-3,直到获取导通第n级激励电源的时刻tn:
54、步骤5-1:在时刻ts+1触发导通第s+1级激励电源,所述时刻ts+1满足:
55、vs为时刻ts电枢速度,a为电枢运动平均加速度,h为相邻两级驱动线圈中心间距,tm为驱动线圈放电电流从零至达到最大值时的时间间隔;
56、步骤5-2:通过中央控制器计算得到时刻ts+1时电枢预计速度为
57、
58、步骤5-3:令s=s+1。
59、结合第一方面,在第一方面的某些实现方式中,时刻ts+1时电枢与第1级驱动线圈中心线间距xs+1满足:xs+1=xs+h-atm(ts+1-ts)<xs+h,xs为时刻ts时电枢与第1级驱动线圈中心线间距。
60、结合第一方面,在第一方面的某些实现方式中,所述电枢经过第1级驱动线圈中心线前方第j个光电探头gzj、第j+1个光电探头gzj+1时的时刻和速度分别为tzj、vzj和tzj+1、vzj+1,电枢经过第1级驱动线圈中心线前方第j+1个光电探头gzj+1时的时刻和速度分别为
61、结合第一方面,在第一方面的某些实现方式中,所述弹道靶满足以下至少一项:
62、所述高压气体炮管、所述电磁发射管彼此间同轴、内径相等,内径不小于50mm;
63、所述高压气体炮管与所述电磁发射管通过法兰结构连接;
64、所述高压气体炮管或者电磁发射管由同规格管材分段互相连接,各段之间采用法兰结构、哈夫螺母结构或者哈夫卡箍结构连接;
65、所述电枢结构为整体实心圆柱或者空心圆柱型式;
66、所述电枢材料为铝或者铝合金;
67、所述模型为不带弹托的全口径模型或者带弹托的组合体模型,所述模型为不带弹托的全口径模型时,模型发射后经过膨胀箱进入试验舱,所述模型为带弹托的组合体模型时,组合体模型由模型本体和弹托组成,模型发射后弹托和模型本体在膨胀箱内实现分离,模型本体进入试验舱;
68、所述膨胀箱和试验舱安装模型速度测量系统、测量模型位置及其姿态的照相系统、流场显示用阴/纹影仪及测量光辐射特性的光辐射测量系统;
69、所述弹道靶包括数个支撑机构及轨道系统,支撑机构分别位于高压气室、高压气体炮管、电磁发射管、膨胀箱和试验舱下方,支撑机构安装在轨道系统上并且能沿着轨道移动;
70、所述充电机采用igbt串联谐振恒流充电电源;
71、所述模型前方的高压气体炮管、电磁发射管、膨胀箱和试验舱内充有的试验气体为空气,空气压力为10pa~0.2mpa;
72、所述电枢在电磁发射管内第1级驱动线圈中心线处速度vza满足0<vza≤150m/s。
73、第二方面,提供了一种时序触发控制方法,所述方法应用于如上述第一方面中的任意一种实现方式中所述的弹道靶,所述方法包括:
74、步骤1:所述高压气室释放出气体驱动所述电枢推动所述模型向前运动;
75、步骤2:令s=1,当电枢运动经过第1级驱动线圈中心线后方第m个光电探头时,i=m,循环执行以下步骤2-1、步骤2-2,直到触发第1级激励电源:
76、步骤2-1:当电枢运动经过第1级驱动线圈中心线后方第i个光电探头时,电枢与第1级驱动线圈中心线距离为lfi1=(i-1/2)h,通过电枢测速装置执行测量、中央控制器进行信号处理,得到此时刻和此位置电枢速度vfi;
77、步骤2-2:
78、如果则在延迟时间δt1后触发第1级激励电源,所述延迟时间δt1满足:令s=s+1,令i=i-1,跳转出本循环执行步骤3;
79、如果则不准备触发任何激励电源,令i=i-1;
80、步骤3:循环执行以下步骤3-1、步骤3-2,直到电枢经过第1级驱动线圈中心线后方第1个光电探头,并通过第1级驱动线圈中心线;
81、步骤3-1:当电枢运动至第1级驱动线圈中心线后方第i个光电探头时,电枢与第s级驱动线圈中心线距离为lfis=(i+s-3/2)h,通过电枢测速装置执行测量、中央控制器进行信号处理,得到此时刻和此位置电枢速度vfi;
82、步骤3-2:
83、如果则立即触发第s级激励电源,令s=s+1,令i=i-1;
84、如果则在延迟时间δts后触发第s级激励电源,所述延迟时间δts满足:令s=s+1,令i=i-1;
85、如果则不准备触发任何激励电源,令i=i-1;
86、步骤4:当电枢通过第1级驱动线圈中心线,并运动至第1级驱动线圈中心线前方第1个光电探头gz1时,触发导通第s级激励电源,此时刻为ts,电枢与第1级驱动线圈中心线间距为xs=h/2;通过电枢测速装置执行测量、中央控制器进行信号处理,得到ts时刻此位置电枢速度vs;
87、步骤5:循环执行以下步骤5-1、步骤5-2和步骤5-3,直到获取导通第n级激励电源的时刻tn:
88、步骤5-1:在时刻ts+1触发导通第s+1级激励电源,所述时刻ts+1满足:
89、vs为时刻ts电枢速度,a为电枢运动平均加速度,h为相邻两级驱动线圈中心间距,tm为驱动线圈放电电流从零至达到最大值时的时间间隔;
90、步骤5-2:通过中央控制器计算得到时刻ts+1时电枢预计速度为
91、
92、步骤5-3:令s=s+1。
93、与现有技术相比,本技术提供的方案至少包括以下有益技术效果:
94、(1)本发明发射装置采用高压气体和电磁弹射复合驱动方式,相比单纯高压气体驱动的一级炮,发射装置驱动能力提升数倍以上。可以利用电磁驱动装置多级赋能的特点,通过增加激励电源和驱动线圈级数的方法,解决大口径设备需要的高能量供给问题。
95、(2)本发明发射装置采用高压气体和电磁弹射复合驱动方式,电磁弹射装置驱动线圈(初级)与电枢(次级)之间设置绝缘发射管,相关研究表明口径越大电磁耦合效率和电磁能量转化效率越高,口径在50mm以下耦合效率和电磁能量转化效率会急剧下降。本发明设置发射管口径至少大于等于50mm,相比于电磁驱动的二级炮,在保证较高能量转化效率前提下,发射管口径增加数倍,正好特别适合大尺寸大质量模型弹道靶试验。
96、(3)单独高压气体驱动或单独多级电磁驱动均有其各自特有的内弹道特性,单独高压气体驱动时弹丸发射初期加速快但弹底压力迅速降低,无法为弹丸提供较高的平均压力,内弹道性能不佳,后继乏力;单独电磁弹射驱动时,电枢需从静止加速且相比高压气体驱动初期加速慢。本发明采用先高压气体和后电磁弹射为主的复合驱动方式,结合各自驱动特性优势,先以高压气体驱动电枢快速加速,在电磁发射启动时给予电枢一定初速度,之后利用电磁弹射装置激励电源和驱动线圈轴向分布、多级赋能、单级可独立调控等特点,通过调控各级电路结构参数和电磁参数,优化储能、赋能方案,保证较高的能量转换效率的同时,使模型运动过程速度、加速度更平稳可控,总体改善内弹道特性,实现“软发射”。
97、(4)本发明发射装置采用高压气体和电磁弹射复合驱动方式,结构密封性和安全性更高,是比火药或氢氧爆轰更安全、清洁、高效的动力源。
98、(5)随着高能量密度储能技术、高压开关技术和高强度新绝缘材料技术瓶颈的突破,未来多级线圈电磁弹射装置可实现模块化、小型化、轻量化、智能化,电磁驱动力作为弹道靶的独立动力源将具备越来越大的优势。
- 还没有人留言评论。精彩留言会获得点赞!