本发明涉及火箭瞄准发射,尤其涉及一种液体火箭射前自动瞄准的方法、装置、介质和设备。
背景技术:
1、液体火箭在发射前依靠安装在火箭上的棱镜,通过地面人工光学瞄准的方式,确定箭体滚转角与射向角度之间的关系,作为一个射前参数上传给箭体计算机参与点火后制导姿控的计算。
2、由于液体火箭箭体的非刚性特性,在燃料加注的过程中,箭体一直处在微量的姿态变化过程中,所以滚转角一直在变化,直到加注完成才基本稳定。所以在射前瞄准专业的设计过程,包括从箭体结构的最初设计直到火箭点火起飞的全过程,棱镜的安装位置需要考虑箭体总装、加注和发射过程中的各种结构干涉,瞄准人员的位置及发射场地实地情况等问题。以往的实际发射过程,为了防止出现临近点火时刻无法瞄准的问题,在加注过程中需要全程进行瞄准跟踪,由于发射当天的天气、光照等情况的不可预期性,环境和结构的各种限制情况,火箭的射前瞄准过程会出现无法瞄准的问题。
技术实现思路
1、有鉴于此,本发明实施例的目的在于提供一种液体火箭射前自动瞄准的方法、装置、介质和设备,以解决火箭的射前瞄准过程会出现无法瞄准的技术问题。
2、为达到上述目的,第一方面,本发明提供一种液体火箭射前自动瞄准的方法,所述方法包括:
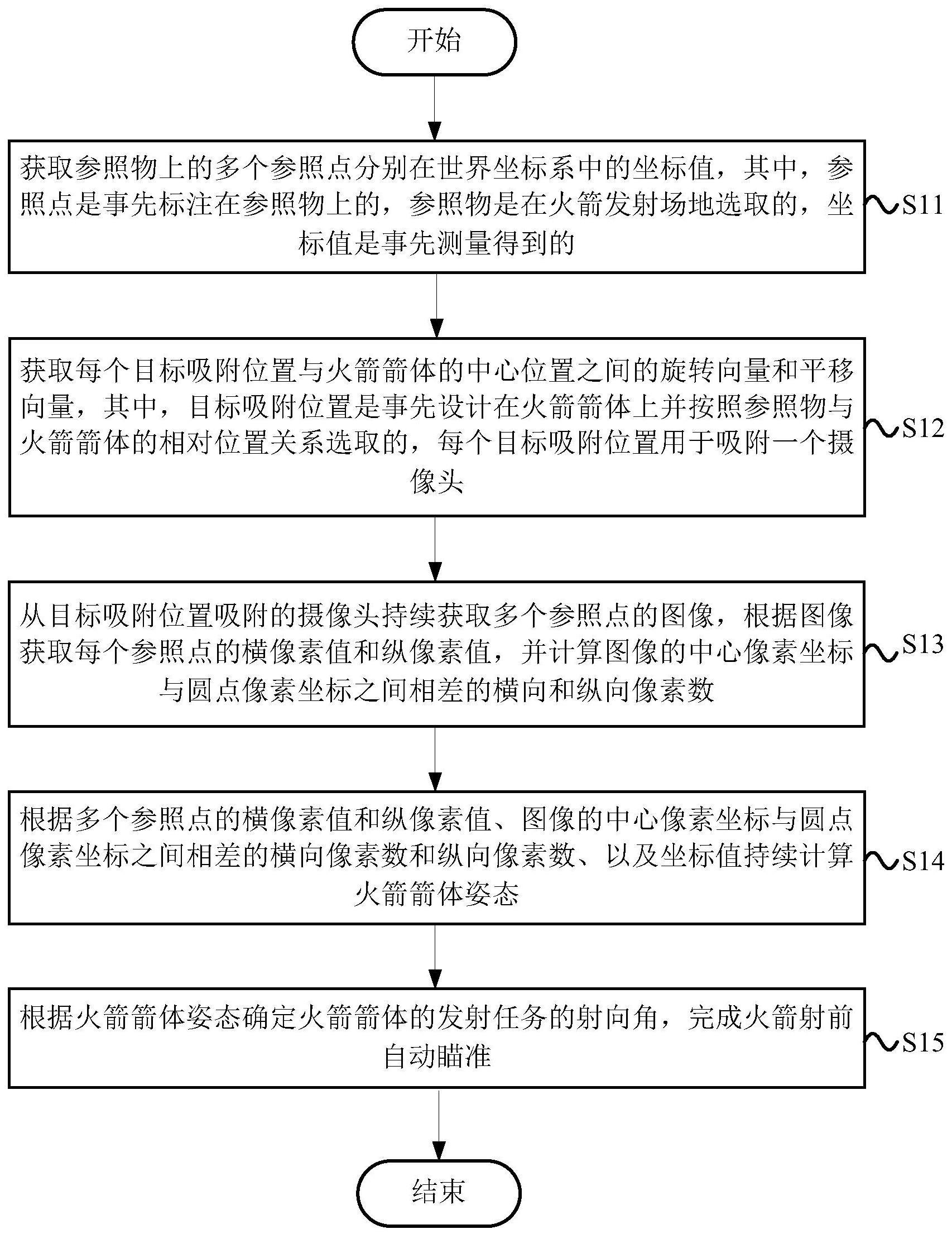
3、获取参照物上的多个参照点分别在世界坐标系中的坐标值,其中,所述参照点是事先标注在所述参照物上的,所述参照物是在火箭发射场地选取的,所述坐标值是事先测量得到的;
4、获取每个目标吸附位置与所述火箭箭体的中心位置之间的旋转向量和平移向量,其中,所述目标吸附位置是事先设计在火箭箭体上并按照所述参照物与火箭箭体的相对位置关系选取的,每个所述目标吸附位置用于吸附一个摄像头;
5、从所述目标吸附位置吸附的摄像头持续获取多个所述参照点的图像,根据所述图像获取每个参照点的横像素值和纵像素值,并计算所述图像的中心像素坐标与圆点像素坐标之间相差的横向和纵向像素数;
6、根据多个所述参照点的横像素值和纵像素值、所述图像的中心像素坐标与圆点像素坐标之间相差的横向像素数和纵向像素数、以及所述坐标值持续计算火箭箭体姿态;
7、根据所述火箭箭体姿态确定所述火箭箭体的发射任务的射向角,完成火箭射前自动瞄准。
8、在一些可能的实施方式中,
9、所述参照点的个数至少为四个,所述参照物为与所述火箭的箭体平行建筑物或者在建筑物上喷涂特定的颜色的区域作为参照物。
10、在一些可能的实施方式中,所述参照物的形状为矩形,所述参照点为所述矩形的四个顶点,任意两个所述参照点之间的距离大于10m。
11、在一些可能的实施方式中,根据多个所述摄像头在火箭外壳上的吸附位置中至少有两个摄像头拍摄到的参照点的个数的和大于6的方式选取多个目标吸附位置。
12、在一些可能的实施方式中,所述火箭箭体姿态的计算公式为:
13、
14、其中,为所述火箭箭体的姿态;u、v分别为所述参照点在图像中的横像素值和纵像素值;x、y、z分别为所述参照点在世界坐标系中的x、y、z方向的坐标值,dx、dy为分别表示每个像素在横轴x和纵轴y的物理尺寸,单位为毫米/像素;u0、v0分别为所述图像的中心像素坐标和原点像素坐标之间相差的横向和纵向的像素数;f为所述摄像头的镜头焦距;和(xc,yc,zc)分别是所述摄像头的吸附位置与火箭箭体的中心位置之间的旋转向量和平移向量。
15、第二方面,本发明实施例提供了一种液体火箭射前自动瞄准的装置,所述装置包括:
16、第一获取单元,用于获取参照物上的多个参照点分别在世界坐标系中的坐标值,其中,所述参照点是事先标注在所述参照物上的,所述参照物是在火箭发射场地选取的,所述坐标值是事先测量得到的;
17、第二获取单元,用于获取每个目标吸附位置与所述火箭箭体的中心位置之间的旋转向量和平移向量,其中,所述目标吸附位置是事先设计在火箭箭体上并按照所述参照物与火箭箭体的相对位置关系选取的,每个所述目标吸附位置用于吸附一个摄像头;
18、获取与计算单元,用于从所述目标吸附位置吸附的摄像头持续获取多个所述参照点的图像,根据所述图像获取每个参照点的横像素值和纵像素值,并计算所述图像的中心像素坐标与圆点像素坐标之间相差的横向和纵向像素数;
19、姿态计算单元,用于根据多个所述参照点的横像素值和纵像素值、所述图像的中心像素坐标与圆点像素坐标之间相差的横向和纵向像素数和所述坐标值持续计算火箭箭体姿态;
20、确定单元,用于根据所述火箭箭体姿态确定所述火箭箭体的发射任务的射向角,完成火箭射前自动瞄准。
21、在一些可能的实施方式中,
22、所述参照点的个数至少为四个,所述参照物为与所述火箭的箭体平行建筑物或者在建筑物上喷涂特定的颜色的区域作为参照物。
23、在一些可能的实施方式中,
24、根据多个所述摄像头在火箭外壳上的吸附位置中至少有两个摄像头拍摄到的参照点的个数的和大于6选取吸附位置,并获取所述吸附位置与所述火箭箭体的中心位置之间的旋转向量和平移向量。
25、在一些可能的实施方式中,所述姿态计算单元具体用于:根据下述公式计算火箭箭体姿态:
26、
27、其中,为所述火箭箭体的姿态;u、v分别为所述参照点在图像中的横像素值和纵像素值;x、y、z分别为所述参照点在世界坐标系中的x、y、z方向的坐标值,dx、dy为分别表示每个像素在横轴x和纵轴y的物理尺寸,单位为毫米/像素;u0、v0分别为所述图像的中心像素坐标和原点像素坐标之间相差的横向和纵向的像素数;f为所述摄像头的镜头焦距;和(xc,yc,zc)分别是所述摄像头的吸附位置与火箭箭体的中心位置之间的旋转向量和平移向量。
28、第三方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述任意一种液体火箭射前自动瞄准的方法。
29、第四方面,本发明实施例提供了一种计算机设备,所述计算机设备包括:
30、处理器;
31、用于存储所述处理器可执行指令的存储器;
32、其中,所述处理器被配置为执行所述指令,以实现上述任意一种液体火箭射前自动瞄准的方法。
33、上述技术方案具有如下有益效果:
34、本发明实施例提供了一种液体火箭射前自动瞄准的方法、装置、介质和设备,该方法包括:在火箭发射场地选取特定的参照物,并在参照物上标注多个参照点;按照参照物与火箭箭体的相对位置关系选取火箭箭体上的多个目标吸附位置,将多个摄像头分别吸附在每个目标吸附位置,并获取目标吸附位置与火箭箭体的中心位置之间的旋转向量和平移向量;通过多个摄像头持续拍摄参照物的多个参照点的图像,根据图像获取每个参照点的横像素值和纵像素值,并计算图像的中心像素坐标与圆点像素坐标之间相差的横向和纵向像素数;分别测量每个参照点在世界坐标系中的坐标值;根据多个参照点的横像素值和纵像素值、图像的中心像素坐标与圆点像素坐标之间相差的横向和纵向像素数、以及参照点在世界坐标系中的坐标值持续计算火箭箭体姿态;根据火箭箭体姿态确定火箭箭体的发射任务的射向角,完成火箭射前自动瞄准。本发明实施例可以减轻瞄准人员的工作量,缩短发射流程,有利于实现火箭的快速发射。