一种智能电磁抛网系统及控制方法与流程
本公开涉及电磁发射,具体而言,涉及一种智能电磁抛网系统及控制方法。
背景技术:
1、当前,各类手持式抛网(绳)器已大量应用,特别是限制目标人物的活动,捕获流浪动物,救助野生动物等场景。但现有的各类抛网器,如电磁型、气动型、火药型等,其中,电磁抛投器是通过电磁线圈技术,利用脉冲电流瞬间产生强磁场,推动电枢运动,电枢带动抛投物抛射出去原理的装置。因电磁发射具有动力大、效率高、便于维护及隐蔽性好等优势,电磁抛投器现广泛应用于救援、消防、抛网等领域。但是,目前抛网器的抛射准确性较低,针对移动目标的命中成功率较低,因此,这些问题的普遍存在制约了抛网器的推广和使用,如何提升抛网命中的准确性,是一个亟待解决的问题。
技术实现思路
1、本公开实施例至少提供一种智能电磁抛网系统及控制方法,可以提升抛网的命中准确性。
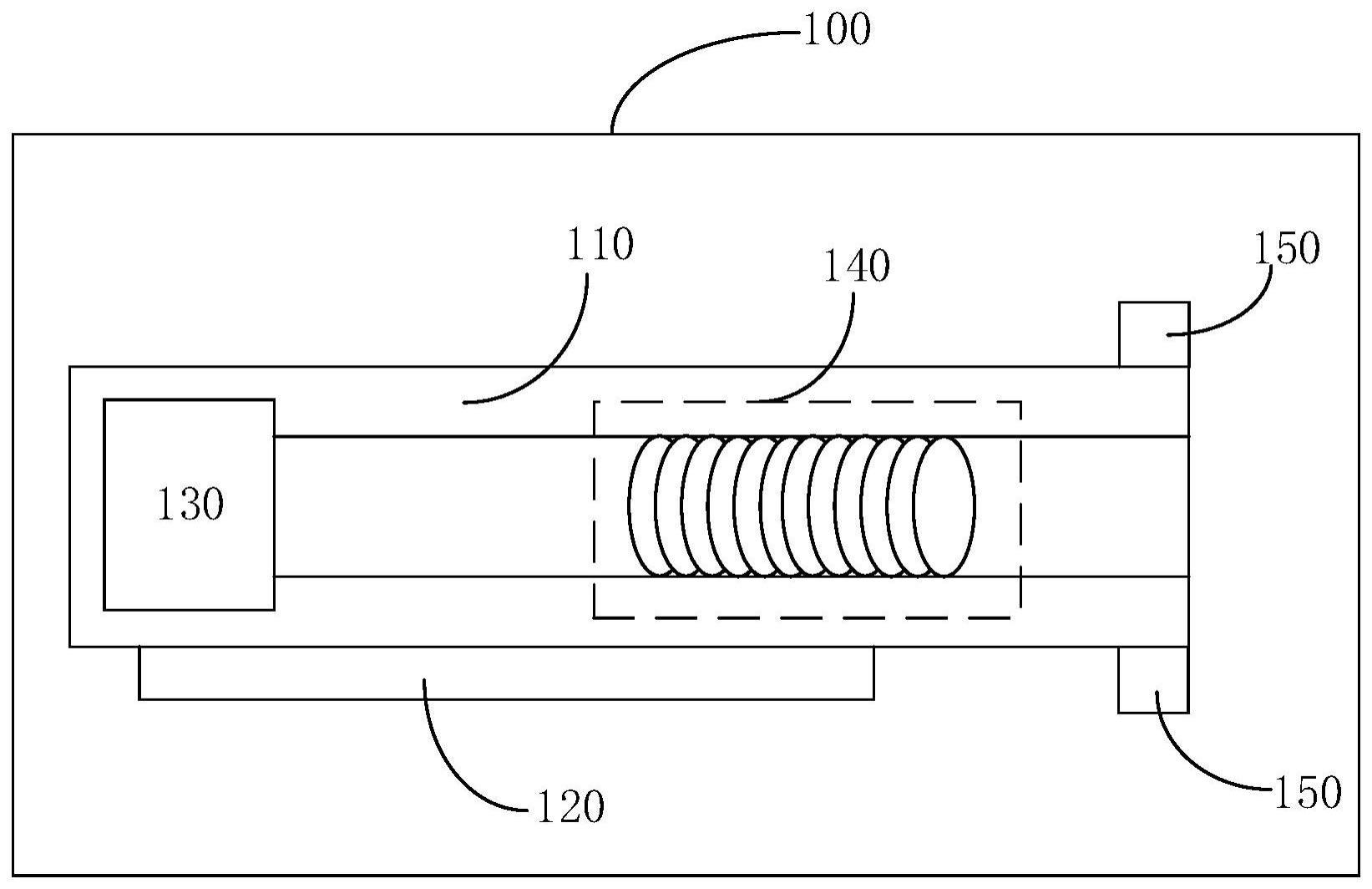
2、本公开实施例提供了一种智能电磁抛网系统,所述智能电磁抛网系统包括:主体、动作调整模块、处理器、电磁发射器以及摄像模块;
3、所述处理器以及所述电磁发射器设置于所述主体内,所述主体上设置有所述摄像模块;所述动作调整模块与所述主体连接,所述处理器分别与所述动作调整模块、所述电磁发射器以及所述摄像模块连接;
4、所述摄像模块,用于采集目标图像,发送所述目标图像至所述处理器;
5、所述处理器,用于在所述目标图像中识别目标物体,确定所述目标物体与所述主体之间的相对位置信息;根据相邻两帧所述目标图像,确定所述目标物体对应的运动状态信息;根据所述运动状态信息,确定所述目标物体对应的预测位置;确定所述主体在朝向所述预测位置与所述相对位置信息之间的动作调整量,并将所述动作调整量发送至所述动作调整模块;
6、所述动作调整模块,用于根据所述动作调整量,调整所述主体的位姿;
7、所述处理器,还用于响应于用户针对所述电磁发射器的触发操作,控制所述电磁发射器发射捕网。
8、一种可选的实施方式中,所述主体上设置有多个不同位置的所述摄像模块,所述处理器具体用于:
9、将所述目标图像输入至预先训练好的目标识别模型中,确定并标注所述目标图像中包括的所述目标物体,其中,所述目标识别模型是通过预设的样本图像以及对应的物体标签训练得到的;
10、将标注有所述目标物体的所述目标图像输入至预先训练好的距离识别模型中,确定所述目标物体与所述摄像模块之间的拍摄距离信息,其中,所述距离识别模型是通过预设的样本图像以及对应的拍摄距离标签训练得到的;
11、针对每个所述摄像模块,确定该摄像模块拍摄所述目标图像的拍摄角度;
12、根据所述拍摄角度以及所述拍摄距离信息,确定所述相对位置信息。
13、一种可选的实施方式中,所述处理器具体还用于:
14、针对相邻两帧所述目标图像,分别确定每帧所述目标图像对应的拍摄时间,以及每帧所述目标图像中,所述目标物体在图像坐标系下的图像坐标信息;
15、根据所述图像坐标信息以及所述拍摄时间,确定所述运动状态信息;
16、针对所述运动状态信息以及所述图像坐标信息进行卡尔曼滤波运算,确定在所述图像坐标系下,所述目标物体在预设时间后的预测图像坐标;
17、将所述预测图像坐标转换至世界坐标系下,确定所述预测位置。
18、一种可选的实施方式中,所述动作调整量包括水平调整角以及垂直调整角,所述处理器具体还用于:
19、当所述垂直调整角的调整方向为向上调整时,控制所述电磁发射器增大发射功率;
20、当所述垂直调整角的调整方向为向下调整时,控制所述电磁发射器减小发射功率。
21、一种可选的实施方式中,所述智能电磁抛网系统还包括供电模块;
22、所述供电模块设置于所述主体内;
23、所述供电模块分别与所述处理器、所述动作调整模块、所述电磁发射器以及所述摄像模块连接。
24、一种可选的实施方式中,所述智能电磁抛网系统还包括把手以及发射按钮;
25、所述把手与所述动作调整模块刚性连接;
26、所述发射按钮设置于所述把手上,连接在所述供电模块与所述电磁发射器之间。
27、一种可选的实施方式中,所述智能电磁抛网系统还包括捕网盖板;
28、所述捕网盖板设置于所述电磁发射器的发射口对应的所述主体上;
29、所述捕网盖板与所述电磁发射器中的动作机构连接。
30、本公开实施例还提供一种智能电磁抛网系统的控制方法,应用于如上述实施例中任一所述的智能电磁抛网系统中的所述处理器,所述智能电磁抛网系统还包括:所述主体、所述动作调整模块、所述电磁发射器以及所述摄像模块,所述方法包括:
31、在所述摄像模块发送的目标图像中识别目标物体,确定所述目标物体与所述主体之间的相对位置信息;
32、根据相邻两帧所述目标图像,确定所述目标物体对应的运动状态信息;
33、根据所述运动状态信息,确定所述目标物体对应的预测位置;
34、确定所述主体在朝向所述预测位置与所述相对位置信息之间的动作调整量,并将所述动作调整量发送至所述动作调整模块;
35、响应于用户针对所述电磁发射器的触发操作,控制所述电磁发射器发射捕网。
36、本公开实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述智能电磁抛网系统的控制方法,或上述智能电磁抛网系统的控制方法中任一种可能的实施方式中的步骤。
37、本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述智能电磁抛网系统的控制方法,或上述智能电磁抛网系统的控制方法中任一种可能的实施方式中的步骤。
38、本公开实施例还提供一种计算机程序产品,包括计算机程序/指令,该计算机程序、指令被处理器执行时实现上述智能电磁抛网系统的控制方法,或上述智能电磁抛网系统的控制方法中任一种可能的实施方式中的步骤。
39、本公开实施例提供的一种智能电磁抛网系统及控制方法,智能电磁抛网系统包括:主体、动作调整模块、处理器、电磁发射器以及摄像模块;处理器以及电磁发射器设置于主体内,主体上设置有摄像模块;动作调整模块与主体连接,处理器分别与动作调整模块、电磁发射器以及摄像模块连接;摄像模块,用于采集目标图像,发送目标图像至处理器;处理器,用于在目标图像中识别目标物体,确定目标物体与主体之间的相对位置信息;根据相邻两帧目标图像,确定目标物体对应的运动状态信息;根据运动状态信息,确定目标物体对应的预测位置;确定主体在朝向预测位置与相对位置信息之间的动作调整量,并将动作调整量发送至动作调整模块;动作调整模块,用于根据动作调整量,调整主体的位姿;处理器,还用于响应于用户针对电磁发射器的触发操作,控制电磁发射器发射捕网。可以提升抛网的命中准确性。
40、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!