一种基于线性自抗扰的敏捷转弯复合控制方法
本发明属于导弹敏捷转弯控制,尤其涉及一种基于线性自抗扰的敏捷转弯复合控制方法。
背景技术:
1、近年来,虽然大规模战争在世界上逐渐减少,但是却经常会发生一些低强度的局部战争,比如地区冲突等。这些小规模的战争对于适用于小规模作战的轻型武器的需求也随之逐渐增加。特别是在城市作战中,街巷纵横,建筑物高大、坚固、密集,作战条件恶劣,建筑物背面的强隐蔽目标对导弹的过顶迂回攻击能力提出了更高的要求。
2、这种攻击方式是使导弹执行任务时飞行至高大障碍物顶部再调转方向下压攻击目标的一种攻击策略。这种攻击方式相较于常规的迎面攻击提高了突袭性,对打击敌方反斜面目标的能力有效增强。但是受限于导弹的机动性能,一般导弹的最大机动过载为20-40g。与此同时,在打击目标过程中受气动干扰、阵风等多种因素影响,最终导致导弹无法完成敏捷转弯的过程。现有的复合控制系统方案设计比较依赖于系统的精确动力学数学模型,且忽略了内部扰动和外部扰动对复合控制系统的影响。实际应用中需要考虑直接力装置侧向喷流气动干扰流场难以建模,脉冲发动机会引起运动模态变化和随机干扰等。直接力控制技术落实到工程实践上也存在一些亟待探讨验证的问题,其中包括气动力和直接力如何实现高效配合、复合控制系统的跟踪能力和抗扰动性能等。
技术实现思路
1、为解决上述问题,本发明提供一种基于线性自抗扰的敏捷转弯复合控制方法,能够吸收气动力控制和直接力控制各自的优点,可以进行敏捷转弯并且具有抗干扰性。
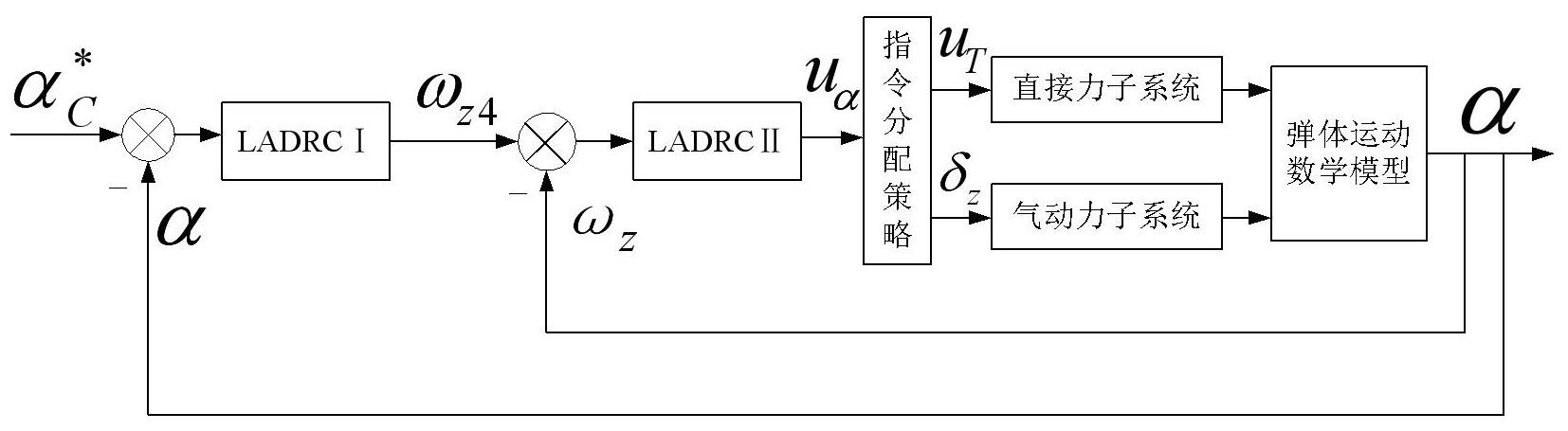
2、一种基于线性自抗扰的敏捷转弯复合控制方法,导弹在串级线性自抗扰复合控制器的控制下进行敏捷转弯,所述串级线性自抗扰复合控制器的获取方法如下:
3、s1:基于外部干扰和内部不确定性建立敏捷转弯飞行器的姿态复合控制模型;
4、s2:基于姿态复合控制模型建立由内环俯仰角速度控制器和外环攻角控制器串联得到的串级线性自抗扰复合控制器;
5、s3:将串级线性自抗扰复合控制器输出的控制量作为虚拟控制量,并通过指令分配算法将虚拟控制量动态分配到导弹的直接力装置和气动舵执行装置的执行机构中,得到两种执行机构各自的实际控制量;
6、s4:导弹的两种执行机构在各自的实际控制量控制下进行敏捷转弯,再基于转弯后导弹的俯仰角速度和攻角判断串级线性自抗扰复合控制器的响应性能和跟踪性能是否满足设定要求,若为是,则得到最终的串级线性自抗扰复合控制器,若为否,则调节内环俯仰角速度控制器和外环攻角控制器的增益,重新执行步骤s3~s4。
7、进一步地,步骤s1中基于外部干扰和内部不确定性建立的敏捷转弯飞行器的姿态复合控制模型具体为:
8、
9、其中,为准攻角变化率,为在准弹体系下导弹绕轴转动的角速度,为准攻角的辅助变量,为舵机产生的升降舵偏角辅助变量,分别为准攻角和升降舵偏角的干扰,是包含升降舵偏角和导弹姿控脉冲发动机产生的开关控制量的虚拟控制量,且,和分别为和的权重系数;
10、准攻角的辅助变量和升降舵偏角辅助变量的计算为:
11、
12、
13、其中,为导弹的准攻角,分别表示气动力在准弹体系下沿x轴、y轴的分量;为导弹增速发动机推力在准弹体系下沿轴的分量;为导弹质量;为重力加速度;为导弹的俯仰角;为导弹在地面系中的速度矢量;为导弹脉冲发动机产生的推力值;为导弹姿控脉冲发动机产生的开关控制量;分别为准攻角和角加速度的气动力矩系数; q, s, l分别表示动压、特征面积和特征长度;为导弹的转动惯量。
14、进一步地,所述s2中的串级线性自抗扰复合控制器的建立方法如下:
15、步骤s21:根据姿态复合控制模型构造外环攻角环控制器如下:
16、
17、式中,为外环攻角控制量,是外环攻角环控制器的增益,其为待调参数,为外环攻角的参考输入,为由外环攻角环线性观测器观测得出的准攻角的观测量,其中,外环攻角环线性观测器设计如下:
18、
19、式中,为观测量的变化率,为外环攻角环总扰动的观测量,为观测量的变化率,分别为外环攻角环线性观测器中关于和的增益,且为待调参数;
20、由外环攻角控制量可得:
21、
22、根据姿态复合控制模型可得:
23、
24、上述公式中由观测量估计如下:
25、
26、则可得外环攻角控制器输出的准弹体系下导弹绕轴转动的角速度与控制量之间的关系:
27、
28、步骤s22:根据姿态复合控制模型构造内环俯仰角速度控制器如下:
29、
30、式中,为内环俯仰角速度控制量,为内环俯仰角速度控制器的增益,其为待调参数,为外环攻角控制器输出的角速度,为由内环俯仰角速度线性观测器观测得出的角速度观测量,其中,内环俯仰角速度线性观测器设计如下:
31、
32、式中,是内环俯仰角速度环总扰动的观测量,分别为内环俯仰角速度线性观测器中关于和的增益,且为待调参数;
33、由内环俯仰角速度控制量可得:
34、
35、根据姿态复合控制模型可得:
36、
37、上述公式中由观测量估计如下:
38、
39、则可得内环俯仰角速度控制器输出的虚拟控制量与控制量之间的关系:
40、
41、步骤s23:将外环攻角控制器和内环俯仰角速度控制器串联则得到串级线性自抗扰复合控制器,即为串级线性自抗扰复合控制器最终输出的虚拟控制量。
42、进一步地,步骤s3中通过指令分配算法将虚拟控制量动态分配到导弹的直接力装置和气动舵执行装置的执行机构中具体为:
43、步骤s31:定义准攻角误差如下:
44、
45、式中,为外环攻角环的参考输入,即=;
46、步骤s32:根据准攻角误差定义加权函数如下:
47、
48、式中,为可调函数;
49、步骤s33:使用加权函数对虚拟控制量进行分配如下:
50、
51、其中,为导弹姿控脉冲发动机产生的开关控制量,分配给导弹的直接力装置的执行机构,为舵机产生的升降舵偏角,分别给导弹的气动舵执行装置的执行机构,和分别为和的权重系数。
52、进一步地,和的权重系数和的计算方法为:
53、
54、其中,为升降舵偏角的气动力矩系数, q, s, l分别表示动压、特征面积和特征长度,为导弹的直接力装置距离发动机质心的位置,为导弹脉冲发动机产生的推力值,为导弹的转动惯量。
55、有益效果:
56、1、本发明提供一种基于线性自抗扰的敏捷转弯复合控制方法,提出一种由内环俯仰角速度控制器和外环攻角控制器串联得到的串级线性自抗扰复合控制器,导弹在基于串级线性自抗扰复合控制器的控制下进行敏捷转弯,为轻型武器的敏捷转弯能力提供了方案,较好地解决了城市作战场景中采用过顶迂回的方式攻击建筑物背面的强隐蔽目标的问题,尤其适用于轻型武器俯仰平面的敏捷转弯控制。
57、2、本发明提供一种基于线性自抗扰的敏捷转弯复合控制方法,首先给出姿态复合控制模型的设计方法,提供了可行的扰动抑制机制,再基于姿态复合控制模型所设计得到的串级线性自抗扰复合控制器,能够对实际工程使用中的模型不确定、外界扰动等不确定因素进行观测补偿。
58、3、本发明提供一种基于线性自抗扰的敏捷转弯复合控制方法,提出基于控制偏差的指令分配算法,能够针对直接力装置和气动舵两种执行机构的工作特性分配控制指令,使串级线性自抗扰复合控制器的两种执行机构配合高效。
- 还没有人留言评论。精彩留言会获得点赞!