核电放射性多滤芯自动装桶系统及方法与流程
本发明属于核电,具体涉及一种核电放射性多滤芯自动装桶系统及方法。
背景技术:
1、核电厂工艺系统运行的放射性液体通过过滤器进行过滤净化,大部分放射性杂质将被过滤器截留,最终过滤器根据前后压差或表面剂量率更换。目前更换下来的放射性废过滤器在长期贮存前,采用装钢桶后进行水泥固定的处置工艺。
2、通常来讲,核电厂的废滤芯装如200l或者400l钢桶,钢桶大小最终由电厂设计的废物包贮存容器确定。每个钢桶装一个废滤芯,装完后送至对应的水泥固定装置进行水泥固定,固定完成暂存一定年限后最终送处置场贮存。
3、每个核电厂的滤芯一般有6寸、8寸、12寸、16寸等不同的规格,目前不同规格的滤芯都是单独装一个废物桶,造成最终废物包的体积较大,后续贮存的费用较高。也有个别电厂采用如一个400l钢桶内装多个4~8寸的滤芯,可减少最终废物包的体积,但是目前一是采用多滤芯装桶的电厂较少,此外,仅个别电厂采用多滤芯支架,操作人员根据摄像头手动装填的方式,操作不变,滤芯易倾倒或者无法准确就位。鉴于上述因素,亟需降低核电厂产生的废滤芯桶的数量,同时提升多滤芯装桶的安全性。
技术实现思路
1、为克服相关技术中存在的问题,提供了一种核电放射性多滤芯自动装桶系统及方法。
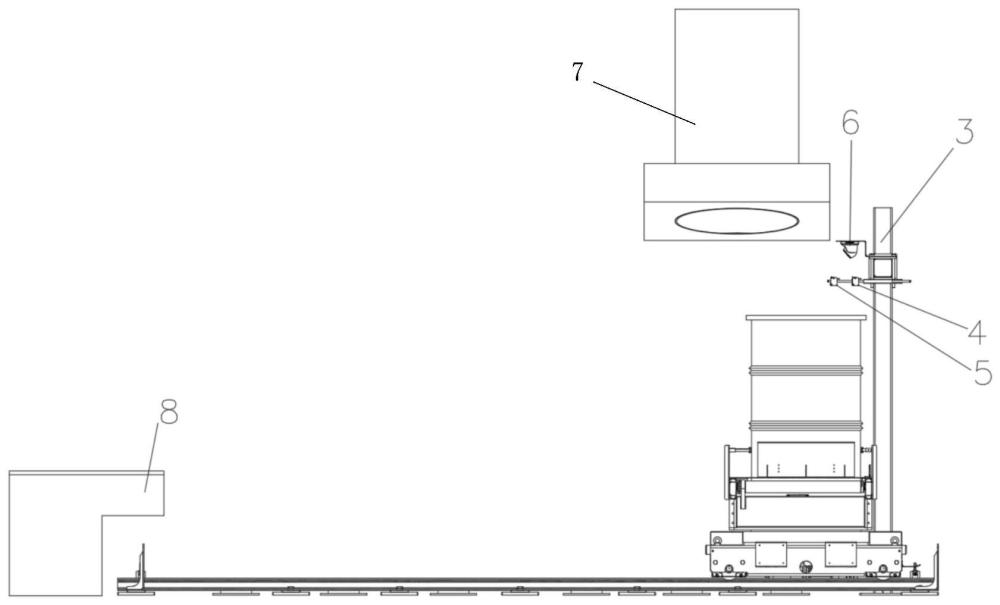
2、根据本公开实施例的一方面,提供一种核电放射性多滤芯自动装桶系统,所述系统包括:控制器、轨道、轨道车、第一激光传感器、第二激光传感器、定位支架、滤芯下降通道;
3、所述轨道车包括行走机构、旋转机构、辊道输送机构和钢桶定位传感器,定位支架设置在轨道的端部,定位支架上设置第一激光传感器和第二激光传感器,所述轨道的一端为对接位置与上游辊道系统连接,所述轨道的另一端设置定位支架,所述轨道两端之间的位置的正上方设置滤芯下降通道,所述滤芯下降通道用于输送核电厂的废弃滤芯,所述运输车设置在所述轨道上;
4、所述控制器控制所述行走机构运行,直至所述轨道车的辊道输送机构与上游辊道系统的辊道对接后,控制器控制辊道输送机构运行,使得上游辊道系统将已取盖且装有滤芯支架的钢桶输送至辊道输送机构上,直至所述钢桶在所述轨道车上定位,接着,控制器控制行走机构运行,直至运输车携带钢桶到达预设检测位置后,控制器执行检测操作,包括:控制器控制旋转机构运行带动所述钢桶旋转,钢桶旋转的过程中,若控制器检测到第一激光传感器发出的探测激光被一个挡片遮挡,则控制旋转机构停止运行,并检测第二激光传感器发出的探测激光是否被遮挡;所述控制器在检测到第二激光传感器发出的探测激光未被遮挡时,执行装填操作,包括:控制器控制轨道车到达正对滤芯下降通的预设装填位置后,控制滤芯下降通道输出一个滤芯,在滤芯掉落至正对的孔位后,控制器控制轨道车返回至预设检测位置,继续执行检测操作;
5、控制器在检测到第二激光传感器发出的探测激光被遮挡时,继续执行检测操作,直至控制器检测到全部孔位均已装填滤芯后,控制旋转机构停止运行,并控制轨道车带动钢桶返回对接上游辊道系统,将已装满滤芯的钢桶输送至上游系统处理。
6、在一种可能的实现方式中,所述滤芯支架为框架结构,每个孔位上开口处设置漏斗型结构。
7、在一种可能的实现方式中,所述系统包括多种滤芯支架,不同滤芯支架用于装填不同尺寸的滤芯。
8、在一种可能的实现方式中,所述系统还包括:摄像头;
9、所述摄像头设置在所述定位支架上,所述摄像头能够拍摄钢桶内的画面,所述控制器从摄像头获取图像数据。
10、在一种可能的实现方式中,所述运输车上表面为方形,上表面相对的第一侧边和第二侧边中,第二侧边设置抓持部件,上表面相对的第三侧边和第四侧边设置栏杆,所述轨道车未承载钢桶时,所述控制器控制所述轨道车的辊道输送机构与上游辊道系统的辊道对接,此时第一侧边接靠上游辊道系统的辊道,接着,控制器控制辊道输送机构运行,使得上游辊道系统将已取盖且装有滤芯支架的钢桶输送至辊道输送机构上,直至所述钢桶触发位于抓持部件的钢桶定位传感器后,控制器控制所述抓持部件抓持所述钢桶,并控制所述旋转机构旋转90°,从初始角度旋转至装载角度,使得运输车两侧的栏杆能够对钢桶在轨道上的直线运动进行限位;
11、在控制器检测到钢桶装填完毕后,控制轨道车返回至对接位置,控制旋转机构从装填角度旋转到初始角度与上游辊道系统的辊道对接,松开抓持部件,控制辊道输送机构运行将已装满滤芯的钢桶输送至上游系统处理。
12、根据本公开实施例的另一方面,提供一种核电放射性多滤芯自动装桶方法,所述方法应用于上述系统中的控制器,所述方法包括以下顺序执行的步骤:
13、步骤100,所述控制器控制所述行走机构运行,直至所述轨道车的辊道输送机构与上游辊道系统的辊道对接;
14、步骤101,所述控制器控制辊道输送机构运行,使得上游辊道系统将已取盖且装有滤芯支架的钢桶输送至辊道输送机构上,直至所述钢桶在所述轨道车上定位;
15、步骤102,控制器控制行走机构运行,直至运输车携带钢桶到达预设检测位置后,控制器执行检测操作,包括:控制器控制旋转机构运行带动所述钢桶旋转,钢桶旋转的过程中,若控制器检测到第一激光传感器发出的探测激光被一个挡片遮挡,则控制旋转机构停止运行,并检测第二激光传感器发出的探测激光是否被遮挡;
16、步骤103,所述控制器在检测到第二激光传感器发出的探测激光未被遮挡时,执行装填操作,包括:控制器控制轨道车到达正对滤芯下降通的预设装填位置后,控制滤芯下降通道输出一个滤芯,在滤芯掉落至正对的孔位后,控制器控制轨道车返回至预设检测位置,继续执行检测操作;
17、步骤104,控制器在检测到第二激光传感器发出的探测激光被遮挡时,继续执行检测操作,直至控制器检测到全部孔位均已装填滤芯后,控制旋转机构停止运行,并控制轨道车带动钢桶返回对接上游辊道系统,将已装满滤芯的钢桶输送至上游系统处理。
18、在一种可能的实现方式中,步骤100还包括:
19、步骤1001,所述轨道车与上游辊道系统的辊道对接时第一侧边接靠上游辊道系统的辊道,控制器控制辊道输送机构运行,使得上游辊道系统将已取盖且装有滤芯支架的钢桶输送至辊道输送机构上,直至所述钢桶触发位于抓持部件的钢桶定位传感器后,控制器控制所述抓持部件抓持所述钢桶,并控制所述旋转机构旋转90°,从初始角度旋转至装载角度;
20、步骤104还包括:
21、步骤1041,在控制器检测到钢桶装填完毕后,控制轨道车返回至对接位置,控制旋转机构从装填角度旋转到初始角度与上游辊道系统的辊道对接,松开抓持部件,控制辊道输送机构运行将已装满滤芯的钢桶输送至上游系统处理。
22、根据本公开实施例的另一方面,提供一种非易失性计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现上述方法。
23、本公开的有益效果在于:本公开的核电放射性多滤芯自动装桶系统中,采用传感器和控制系统,实现单废物桶多滤芯的自动装填,提升了操作人员手动装填的可靠性,降低了系统运行风险。每个钢桶采用多孔位的滤芯支架,由此可以一次性填装多个废弃滤芯,滤芯受到滤芯支架约束实现稳定整齐装填,大大节省了滤芯装填空间,且有效降低了滤芯倾倒的风险,高效安全。
- 还没有人留言评论。精彩留言会获得点赞!