一种用于无人机网枪的柔性拖拽控制方法与流程
本发明属于无人机反制,主要涉及一种用于无人机网枪的柔性拖拽控制方法,用于目标无人机的空中捕获。
背景技术:
1、近年来,随着低空空域管制的逐步开放和“低小慢”飞行器技术的飞速发展,动力三角翼、轻型直升机、无人机等“低小慢”飞行器在消费娱乐及公共安保、航空测绘等领域获得广泛应用,个人及单位拥有数量也在不断增加。同时,由于此类飞行器成本低廉、操作方便、容易获取,易形成“黑飞”。某些无资质、未经审批的个人和单位利用无人机进行地面测绘的行为也对军、民航空中秩序及国家安全造成不小的影响和损失。
2、综合国内外反无人机装备和手段研究现状,目前的反无人机装备主要面向作战任务研制,系统功能完善,集成了雷达探测、激光打击、电磁干扰等多种探测与杀伤方式,可应对大规模大型无人机袭扰。装备系统复杂、威力强大,势必造成装备的研制和使用费用激增,若用于反低小慢目标,一则代价高昂,二则激光烧毁无人机掉落容易造成二次伤害。
3、当前的反无人机技术主要分为两种:一是检测跟踪系统,二是阻截系统。检测跟踪系统是借助雷达、光学或红外摄像头、无线电侦察等手段,发现目标无人机。阻截方式包括无线电信号干扰、激光打击、撒网缠绕目标、电磁脉冲以及这些手段的组合使用。由于单一的检测跟踪系统已经很难发现处于复杂环境下的无人机,传感器融合成为这一技术的发展趋势。
4、针对现有反无人机系统组成复杂、采购和使用成本双高的情况,采用无人机空中捕捉的方式,填补柔性捕获回收“低小慢”目标技术的空白,达到低成本、快速发现并捕获“低小慢”目标的效果。
5、无人机空中捕捉系统首先通过探测设备探测目标无人机,反无人机系统在收到目标指示信息后引导网捕无人机前出抵近目标。首先无人机垂直起飞,向目标位置快速飞行。无人机在飞行过程中接收目标指示信息引导,调整自身航线抵近目标,同时自带光电系统利用目标指示信息主动搜索目标,光电系统搜索并锁定目标后,柔性捕获无人机迅速抵近目标上方并减速至目标飞行速度,在适当时机发射网枪捕捉目标无人机并拖拽至安全地点着陆。
6、通常情况下,网枪产品利用空包弹撞击后产生的推动力,在瞬间产生的气流,推动4个、6个或8个牵引头带动捕捉网呈一定角度向前运动过程中迅速张开,在前方遇到物体时,捕捉网各角的牵引头由于惯性的作用将自动盘罩,达到抓捕目标的效果。
7、现有网枪产品通常均采用的方式为通过手持或无人机载荷方式控制击发,网枪击发后弹出捕捉网,捕捉网罩住无人机目标物后直接缠绕,目标物会直接坠落,无任何针对目标物的保护措施,若目标物携带危险品的情况下,其掉落容易造成对地面人员或设施的二次伤害。
技术实现思路
1、本发明所要解决的技术问题是提供无人机网枪的柔性拖拽方法,其能够将捕获的目标物拖拽至安全位置,避免造成二次伤害。
2、本发明提供了一种用于无人机网枪的柔性拖拽控制方法,包括:
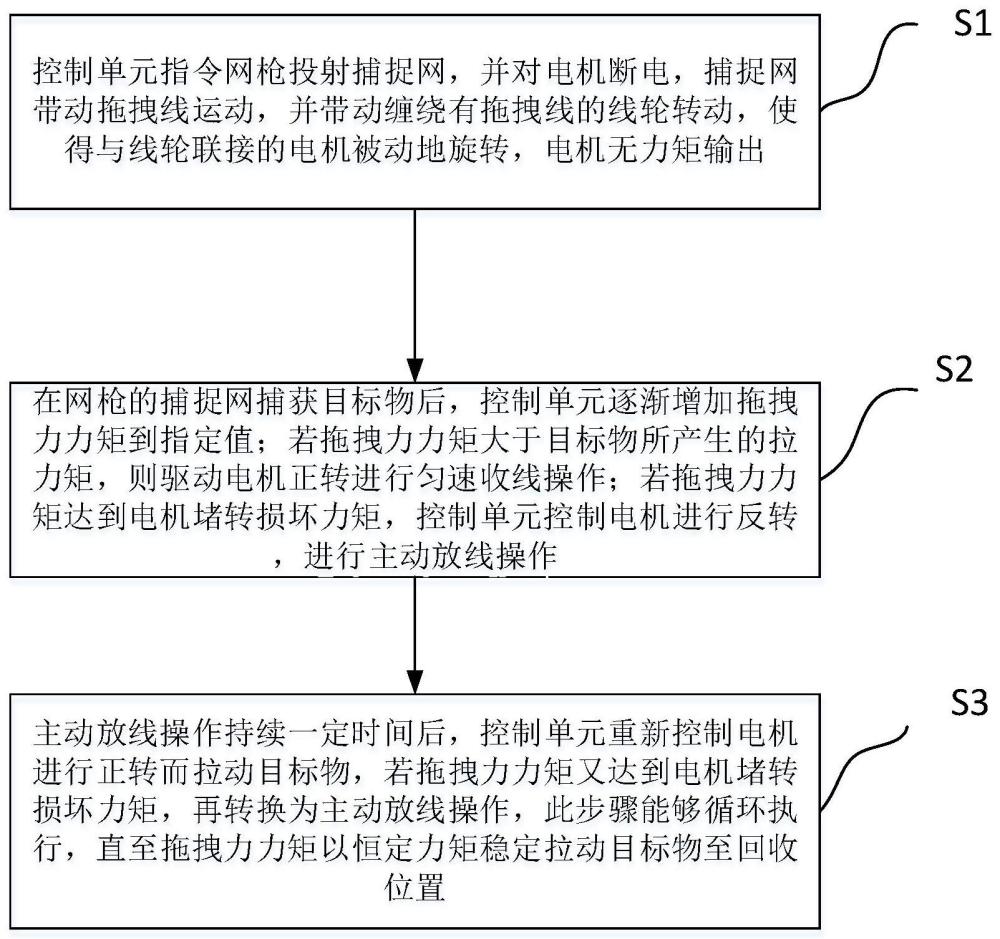
3、s1.控制单元指令网枪投射捕捉网,并对电机断电,所述捕捉网带动拖拽线运动,并带动缠绕有所述拖拽线的线轮转动,使得与所述线轮联接的所述电机被动地旋转,所述电机无力矩输出;
4、s2.在所述网枪的捕捉网捕获目标物后,所述控制单元逐渐增加拖拽力力矩到指定值;若所述拖拽力力矩大于所述目标物所产生的拉力矩,则驱动所述电机正转进行匀速收线操作;若所述拖拽力力矩达到电机堵转损坏力矩,所述控制单元控制所述电机进行反转,进行主动放线操作;
5、s3.所述主动放线操作持续一定时间后,所述控制单元重新控制所述电机进行正转而拉动所述目标物,若拖拽力力矩又达到所述电机堵转损坏力矩,再转换为所述主动放线操作,此步骤能够循环执行,直至所述拖拽力力矩以恒定力矩稳定拉动所述目标物至回收位置。
6、可选地,在步骤s1中,所述控制单元是通过控制电源适配模块对电机断电。
7、可选地,在步骤s2中,所述控制单元是通过逐渐增加拖拽力力矩控制模块的输出电流而逐渐增加所述拖拽力力矩到指定值。
8、可选地,在步骤s2中,所述控制单元是通过所述拖拽力力矩控制模块控制所述电机进行正转或反转。
9、可选地,在步骤s3中所述主动放线操作持续一定时间的长度能够根据控制策略进行调整。
10、可选地,在所述网枪投射捕捉网之前,先通过所述控制单元开启放线保险开关,允许所述线轮放线。
11、可选地,在所述网枪投射捕捉网之前,先通过手动开启放线保险开关,允许所述线轮放线。
12、本发明还提供了一种用于无人机网枪的柔性拖拽装置,包括:电机,所述电机联接至柔性传动轴,所述柔性传动轴联接至卸力轮传动轴;线轮组件,所述线轮组件包括均匀缠绕有拖拽线的线轮,所述拖拽线的一端连接至所述网枪的捕捉网;所述卸力轮传动轴联接至所述线轮;所述电机通过电源适配模块连接至电源;所述电源适配模块用于控制所述电机的通断电;所述电机还连接至拖拽力力矩控制模块;所述拖拽力力矩控制模块用于控制所述电机的正转和反转以及转动力矩。
13、可选地,该柔性拖拽装置还包括主控模组,其包括计算单元;所述计算单元对所述无人机测得的所述目标物的距离数据、目标物大小数据和当前方向与风速数据进行计算,获得计算结果数据。
14、可选地,所述主控模组还包括控制单元;所述控制单元根据所述计算单元的计算结果数据对所述网枪投射捕捉网进行控制;并且通过调整所述拖拽力力矩控制模块的输出电流,从而调整拖拽力力矩。
15、可选地,所述主控模组还包括通信单元,所述通信单元实现在所述控制单元和地面遥控装置之间的通信,用于实现对所述网枪的实时遥控。
16、可选地,在所述网枪投射所述捕捉网时,所述电源适配模块给所述电机的断电,所述拖曳线带动所述卸力轮传动轴转动,从而带动所述柔性传动轴转动,使得所述电机被动旋转,无力矩输出。
17、可选地,所述线轮组件还包括拖拽力机械摩擦机构,用于调节所述卸力轮传动轴转动时的摩擦力。
18、可选地,所述线轮组件还包括麻花轴均匀绕线机构,其设置在所述线轮的前侧,在收线操作时,所述拖拽线先经过所述麻花轴均匀绕线机构的整理,沿所述麻花轴均匀绕线机构的轴向均匀地卷绕在所述线轮上。
19、可选地,所述线轮组件还包括放线保险开关,其通过卡扣装置卡在所述卸力轮传动轴的齿轮上,所述放线保险开关在关闭状态下,所述协力轮传动轴无法转动;所述放线保险开关在开启状态下,所述协力轮传动轴能够转动。
20、可选地,在所述网枪的捕捉网捕获目标物后,所述控制单元通过逐渐增加所述拖拽力力矩控制模块的输出电流而逐渐增加拖拽力力矩到指定值;若拖拽力力矩大于所述目标物所产生的拉力矩,则驱动所述电机正转进行匀速收线操作;若拖拽力力矩达到电机堵转损坏力矩,所述控制单元通过所述拖拽力力矩控制模块控制所述电机进行反转,进行放线操作。
21、可选地,所述放线操作持续一定时间后,所述控制单元通过所述拖拽力力矩控制模块重新控制所述电机进行正转而拉动所述目标物,此操作能够循环执行,直至所述拖拽力力矩以恒定力矩拉动所述目标物。
22、本发明的技术方案有益的技术效果是对无人机网枪捕获后的目标物进行柔性拖拽,根据目标物冲击力的大小进行放线和收线操作处理,实现对目标物的安全回收。
23、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!