一种分布孔径捷联激光导引头及其定位方法与流程
本发明涉及一种分布孔径捷联激光导引头及其定位方法,属于单兵制导弹药及抗干扰。
背景技术:
1、采用低成本精确制导弹药对敌方高价值目标进行“点穴式”打击,是现代战场高效的攻击手段。精确制导弹药普遍采用电视、激光半主动、红外成像和毫米波雷达导引头实现末制导。导引头作为导弹的“眼睛”,需要安装在导弹最前端,战斗部的空间被压缩,上述导引头成本偏高,大约占全弹成本的十分之一。单兵制导弹药布局紧凑、战斗部装空间有限,对成本非常敏感,限制了制导化的发展。目前的导引头技术对于单兵制导弹药普遍存在成本偏高、体积偏大,结构布局不能满足单兵制导弹药的需求。需要研制一种体积、重量、精度、成本兼顾的导引头,结构布局满足单兵制导弹药的精确制导需求。
2、半主动单孔径光学导引头的极限角分辨率主要受系统通光孔径的影响。要提高系统的角分辨率,需增加光路的通光孔径。然而受制造工艺、载荷体积和重量及成本的限制,通光孔径无法实现无限制增大。此外,单孔径导引头容易受到弹药尾焰的污染。光学合成孔径成像技术可以在减小体积,降低加工成本的同时提高导引头成像分辨率。
3、目前已有的半主动合成孔径成像制导的专利中,对目标信号的识别是利用分布式光学系统接收目标的漫反射信号并汇聚到光纤组件中,再通过导光组件照射到激光采集和处理系统,解算出目标偏差角。为提高抗干扰能力,采用中心波长为第一预设波长的窄带滤光片滤除其他干扰信号。如现有技术中申请号为202210646712 .5,发明名称为“一种抗干扰分布式激光回波定位器及目标定位方法”的发明专利中,通过 四象限探测器用于接收激光回波信号,并转换为电信号输出;前端电路用于对电信号进行处理,得到四象限电压幅值,并以差分数字信号的形式与后端电路传输数据;后端电路用于接收差分数字信号,进行识别和计算,并得到目标角偏差。但此种方法对于与目标波长相同的光源,如太阳光、干扰光源等的识别率较低无法保证其高精度要求,存在被干扰的风险。
技术实现思路
1、本发明为解决上述现有技术中存在的问题,提供了一种分布孔径捷联激光导引头及其定位方法,本发明能够满足便于安装的前提下,实现引导头的高精度制导的同时提高抗干扰能力,满足了单兵制导弹药智能化改造的要求。
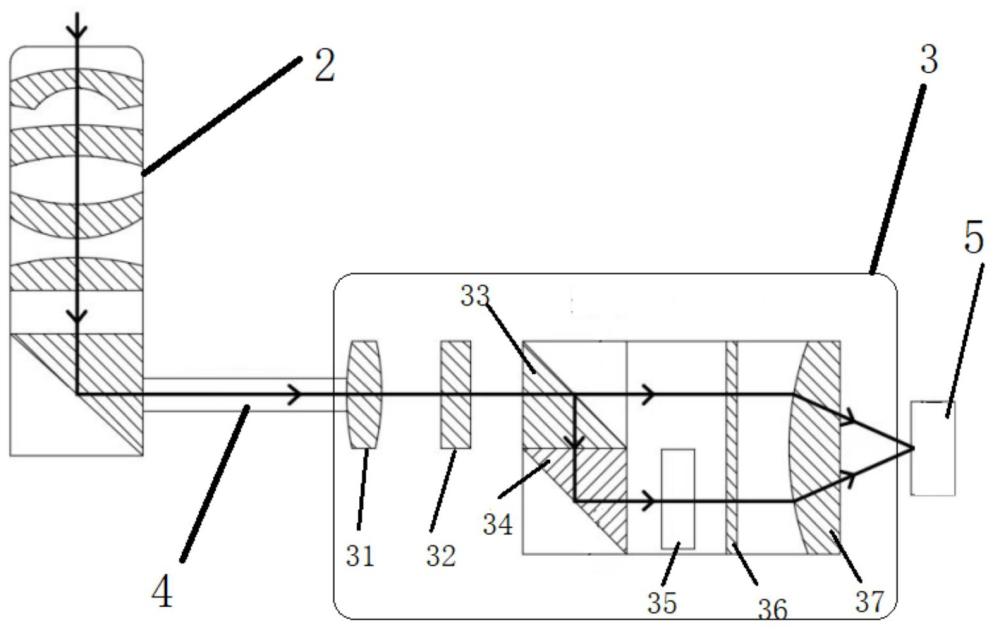
2、为实现上述目的,本发明提供的技术方案为:一种分布孔径捷联激光导引头,至少包括用于光学导引整流罩和信息处理器,光学导引头整流罩上设有四组相对于弹轴对称布置的分布式集光组件,每一组分布式集光组件至少包括分布式集光孔径、传输光纤和光学转发组件,其中分布式集光孔径至少包括用于收集目标漫反射信号的接收物镜和转像棱镜a,目标漫反射信号通过接收物镜压缩光束孔径角,通过转像棱镜a调整信号传播角度后形成耦合光学信号,由传输光纤入射至光学转发组件中;光学转发组件至少包括准直镜、窄带滤光片、分光棱镜、转像棱镜b、波片、偏振片和汇聚透镜,由传输光纤耦合光学信号通过准直透镜将光束转换为平行光,通过用于过滤不同波长谱线的窄带滤光片后,再通过分光棱镜和转像棱镜b,将过滤后的光学信号分成两束传播方向相同、光强相同的光束1和光束2,其中光束1入射到偏振片1区后通过汇聚透镜成像在光电探测器上,从而得到te偏振波;光束2经由转像棱镜b后,通过波片将光束2延时t时间后入射到偏振片2区,其中0.5t≤t≤0.02/t,t为光源的脉冲周期,t单位为秒,通过汇聚透镜成像在光电探测器上,从而得到tm偏振波;信息处理器由光电探测器、前置放大电路、信号调理电路、信号保持、采样电路和处理器构成,其中光电探测器与分布式集光组件一一对应,四组光电探测器分别将分布式集光组件采集的光信号转换为电压信号后,通过前置放大电路对电压信号进行一级放大,并通过信号调理电路、信号保持和采样电路对放大后的电压信号进行调理和采样形成数字信号,通过处理器中运行的识别程序和和差电压法对数字信号进行识别和计算,得到目标光斑在视场中的位置作为载体制导控制信号,其中四组分布式集光组件观察到的视场范围在弹轴处重叠,视场重叠区域为线性区,视场非重叠区域为目标识别区。
3、四组分布式集光组件的视场以导弹轴线为中心,在与导弹轴线相切的平面上半径为 r 的圆上均匀分布,四组视场在弹轴处重叠,视场重叠区域为线性区,视场非重叠区域为目标识别区,分布式集光组件的光轴与弹轴,的夹角α,α=5.5°。
4、偏振片并排设有与光束1和光束2相匹配的偏振片1区和偏振片2区,其中偏振片1区为纵向线栅偏振片,用于分离te偏振波,偏振片2区为横向线栅偏振片,用于分离tm偏振波。
5、接收物镜表面镀有与目标反射信号波长相匹配的增透膜,用于提高目标漫反射信号的透射率。
6、传输光纤采用多模光纤,外加保护套管,以保证在全孔径、全视场角范围内的光信号汇聚到光纤之中。
7、所述光电探测器采用四个apd 探测器,即雪崩光电二极管形成四个象限分别接收四组光信号,当弹轴与光信号的夹角发生变化时,四个象限间的辐射通量发生变化,引起各个象限输出的电压变化, 通过和差电压进行定位;四组视场在弹轴处重叠,视场重叠区域为线性区,视场为±9°,视场非重叠区域为目标识别区,视场分别为9°、20°、-9°、-20°,其中目标识别区根据位置不同,细分成12个区域。
8、还包括一种用于分布孔径捷联激光导引头的定位方法,具体步骤如下:
9、1)目标信号处理:对四组分布式集光组件采集的光信号和背景光信号进行延时和偏振分光处理,并通过光电探测器将收集到的信号转换为四组电压信号va和vb,并获取va的幅值信号va’,获取vb的幅值信号vb’;
10、选取任意组的非0电压的电压幅值信号va’和vb’进行监测,从第一个电压信号开始,判断光电探测器转换并处理后的电压信号在固定时间内的周期和脉宽与目标信号的周期和脉宽是否一致,判断tm偏振波的相位延迟时间与目标值是否一致,当信号一致时进行下一步,当信号不一致时,继续监测;
11、2)计算偏振度:分别提取四组电压信号va’和vb’,根据公式1计算偏振度:
12、公式1
13、式中:va’和vb’分别为电压va和vb的幅值信号,p为获得的偏振度;
14、将计算后得到的偏振度p与目标光信号的偏振度比较,当偏振度p与目标信号偏振度之间的差值在误差范围内时,执行下一步,判断光信号是否在目标识别区,当超出误差范围时,执行步骤1);
15、3)目标识别区的位置判定:根据视场中的位置不同,将目标识别区分为12个区域,提取四路电压幅值信号va’和vb’中的最大值,分别记为va、vb、vc和vd,根据四路电压信号的大小,判断目标所处的识别区位置,并发送载体制导控制信号,驱动弹体进行调整;当四路电压信号的大小均大于0时,直接进行下一步;
16、4)线性区的位置判定:线性区位于视场重叠区域,其中va、vb、vc和vd四路电压信号均大于0,通过公式2至公式5计算关于弹轴x轴和y轴方向的目标光束与弹轴的夹角δx和δy:
17、 公式2
18、公式3
19、公式4
20、公式5
21、式中:m、n分别为和差电压法计算得到的电压变化比值,a1,b1,c1为常数,a1=-5.5527,b1=0.869,c1=8.258;
22、根据夹角δx和δy作为载体制导控制信号,驱动弹体进行调整。
23、根据上述技术方案可知,本发明提供的分布孔径捷联激光导引头及其定位方法通过分布式集光孔径采集并处理目标漫反射信号获得耦合信号,通过分光棱镜和转像棱镜b将耦合信号分成光束1和光束2,将光束1直接通过汇聚透镜成像在光电探测器上,将光束2通过波片延时t后在成像在光电探测器上,形成te偏振光和tm偏振光,由此产生的电压信号的峰值相位不同,将峰值相位和脉宽与目标信号的峰值相位和脉宽比较,利用信息处理器对采集到的信号进行解算,获取精准的目标偏差信息,从而实现高精度制导,本发明相对于现有技术相比具有以下优点:
24、(1)因为本发明所采用的技术方案通过光学转发组件形成相位不同的两个光电信号,即te偏振光和tm偏振光,tm偏振波通过波片进行延时后,其相位差会发生改变,可识别出是否为目标信号,并与干扰光束分离开,所以本发明能够提高了导引头的抗干扰能力;
25、(2)因为本发明所采用的技术方案通过分布式集光组件分别采集目标漫反射的光信号,分光棱镜和偏振片将光束分成te偏振光和tm偏振光,并提取相应的电压信号,计算出偏振度,可与目标光束的偏振度进行对比,所以本发明可以进一步提高识别目标信号的准确度,进一步提高抗干扰能力。提取偏振度信息可以提高相同背景强度或在强背景条件下的微弱信号的探测和识别。
26、(3)因为本发明通过四组分布式集光组件所形成的视场非重叠区域作为目标识别区,通过相应的电压信号判断目标位置,进行位置判定,将视场重叠区域作为线性区,通过解算获取弹轴角度,所以本发明能够更精准的实现引导头的高精度制导。
- 还没有人留言评论。精彩留言会获得点赞!