一种苹果采摘机器人的制作方法
[0001]
本实用新型涉及苹果采摘领域,尤其涉及一种苹果采摘机器人。
背景技术:
[0002]
苹果的产量在全世界水果中的产量排名第二,仅次于香蕉。采摘苹果一般是由人工来完成的,也有半自动采摘苹果的。苹果采摘机械人的实用新型可以解放劳动力,可以更加方便、快捷的将苹果采摘,不会由于来不及采摘而导致苹果腐烂。苹果采摘机械人在果园规模化发展和规范化管理的地区应用更能突显其显著特点。用机械代替传统的人力操作完成苹果采摘作业,既能减轻工人的劳动强度,提高功效,还可降低生产成本,提高经济效益,同时又能抢农时,减少损失,为果树生长发育创造良好环境,促进果品优质高产。
[0003]
目前也有很多国家在研究苹果采摘机器人,其中三爪式苹果采摘机械人在美国、韩国、日本等国家均有研究。其中影响较大的是johan baeten等人研制的苹果采摘机械人,此机械人将工业机器人的六自由度手臂作为机械臂的主体,与其他机械人相比,它不仅可以进行水平方向上的移动,还可以竖直移动,最大程度的扩大了采摘范围,但是整个机器人还存在占地面积较大且质量重,成本高,适用范围小,仅适用于植株较矮的苹果树等诸多问题,因此商品化程度较低。此外,韩国庆北大学研究出了一种具有四个自由度的苹果采摘机械人,它包括一个移动关节和三个旋转关节,还在末端执行器上安装了压力传感器,减少了末端执行器对苹果表皮的损伤。但是这些苹果采摘机械人都是采用最传统的三爪式机械臂来抓取苹果,容易损伤苹果。
技术实现要素:
[0004]
为解决现有技术中缺少能够对苹果进行高效、安全采摘的采摘机器人的问题,本实用新型提供了一种苹果采摘机器人。
[0005]
本实用新型为解决上述技术问题所采用的技术方案是:一种苹果采摘机器人,包括苹果收集箱、行走组件、旋转升降组件和机械手组件,所述行走组件包括多个安装在苹果收集箱底部的履带轮机构,所述旋转升降组件包括安装在苹果收集箱顶部的固定板、位于固定板上方的升降板和回转台,回转台通过转盘轴承安装在升降板上表面,固定板的上表面和升降板的下表面分别安装有两段滑轨,四段滑轨相互平行,升降板上的两段滑轨沿竖直方向的投影与固定板上的两段滑轨分别重合,固定板和升降板之间设有四根支杆,四根支杆分为两对,同一对的两根支杆交叉设置,同一对的两根支杆的中部相铰接,同一对的两根支杆位于沿竖直方向相对的两段滑轨之间,滑轨上安装有一个固定块和一个滑动块,一根支杆的两端分别与固定板所安装滑轨上的固定块和升降板所安装滑轨上的滑动块铰接,另一根支杆的两端分别与固定板所安装滑轨上的滑动块和升降板所安装滑轨上的固定块铰接,固定板上安装有用于带动两个固定板滑轨上的滑动块运动的第一电机,通过滑动块运动并带动支杆转动,以便于改变升降板和固定板之间的距离;
[0006]
所述机械手组件包括安装在回转台上的四边形连杆机构、用于带动四边形连杆机
构转动的第二电机、安装在四边形连杆机构远离回转台一侧的伸缩杆、以及安装在伸缩杆远离四边形连杆机构一端的吸盘抓取机构,所述四边形连杆机构的其中一根铰接轴安装在回转台上,四边形连杆机构的铰接轴均为水平设置,所述伸缩杆的长度方向与四边形连杆机构的铰接轴的长度方向相互垂直,所述吸盘抓取机构包括一块基板,基板上穿设有转轴,转轴的轴线与伸缩杆的轴线对齐设置,基板上开设有四段滑槽,四段滑槽沿转轴的周向均匀间隔设置,滑槽的长度方向均朝向转轴,四段滑槽上分别安装有各自的一个真空吸盘座,真空吸盘座位于基板远离伸缩杆的一侧,四个真空吸盘座上分别安装有各自的真空吸盘,四个真空吸盘座上分别铰接有一根连杆,转轴上铰接有四根过渡杆,四根过渡杆分别与四根连杆铰接,通过转轴旋转并带动过渡杆转动,从而使连杆带动真空吸盘座沿滑槽滑动,以便于四个真空吸盘朝向转轴的轴线运动并配合吸附抓取苹果;所述升降板上安装有一个用于承接被机械手组件所抓取苹果的漏斗,所述苹果收集箱的侧壁开口上安装有斜坡式管道,漏斗的底端与斜坡式管道的顶端之间连接有弹性管道。
[0007]
优选的,所述固定板和升降板均为水平设置的矩形平板,四根支杆的长度相等。
[0008]
优选的,所述固定块位于滑轨远离第一电机的一端,滑动块位于固定块和第一电机之间。
[0009]
优选的,四个真空吸盘均朝向转轴的轴线方向设置。
[0010]
根据上述技术方案,本实用新型的有益效果是:
[0011]
本实用新型提供的苹果采摘机器人,通过旋转升降组件和四边形连杆机构配合带动吸盘抓取机构运动,使机器人在做升降运动时,传动更加稳定、精准,并能够更为灵活的避免树枝和树叶的阻挡。为了避免采摘苹果时有可能压伤苹果,摒弃了传统的三爪式的执行末端,而采用了真空吸盘式的执行末端,通过连杆和过渡杆配合带动四个真空吸盘座在滑槽内同步运动,使四个真空吸盘座能够同步运动至苹果的表面并对苹果进行吸取,能更有效快速的采摘苹果,更能避免对苹果产生不必要的损伤。收集装置采用弹簧式管道收集,使苹果缓慢平稳下落到收集箱中。本实用新型集采摘、收集和运输的一体化的工作形式,不仅大大提高了苹果的采摘效率、减少人工采摘所浪费的时间,并且能大幅提高所采摘苹果的完整性,减少苹果的损伤率,还能很好的减少成本的投入,便于加大采摘的规模,利于苹果产业的进一步发展。
附图说明
[0012]
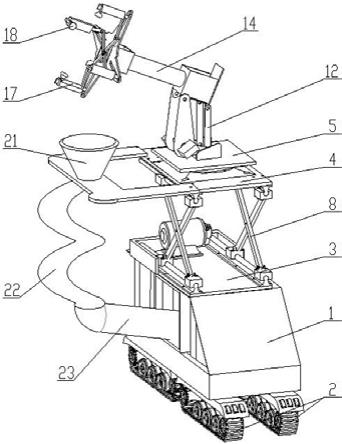
图1为本实用新型的结构示意图;
[0013]
图2为抓取苹果状态的整体示意图;
[0014]
图3为苹果收集箱和行走组件的示意图;
[0015]
图4为旋转升降组件的结构示意图;
[0016]
图5为旋转升降组件上升至极限位置的示意图;
[0017]
图6为旋转升降组件下降至极限位置的示意图;
[0018]
图7为机械手组件的结构示意图;
[0019]
图8为吸盘抓取机构和伸缩杆的结构示意图;
[0020]
图9为吸盘抓取机构抓取苹果状态的示意图。
[0021]
图中标记:1、苹果收集箱,2、履带轮机构,3、固定板,4、升降板,5、回转台,6、转盘
轴承,7、滑轨,8、支杆,9、固定块,10、滑动块,11、第一电机,12、四边形连杆机构,13、第二电机,14、伸缩杆,15、基板,16、滑槽,17、真空吸盘座,18、真空吸盘,19、连杆,20、过渡杆,21、漏斗,22、弹性管道,23、斜坡式管道。
具体实施方式
[0022]
参见附图,具体实施方式如下:
[0023]
一种苹果采摘机器人,包括苹果收集箱1、行走组件、旋转升降组件和机械手组件,所述行走组件包括多个安装在苹果收集箱1底部的履带轮机构2,所述旋转升降组件包括安装在苹果收集箱1顶部的固定板3、位于固定板3上方的升降板4和回转台5,回转台5通过转盘轴承6安装在升降板4上表面,固定板3的上表面和升降板4的下表面分别安装有两段滑轨7,四段滑轨7相互平行,升降板4上的两段滑轨7沿竖直方向的投影与固定板3上的两段滑轨7分别重合。
[0024]
固定板3和升降板4之间设有四根支杆8,四根支杆8分为两对,同一对的两根支杆8交叉设置,同一对的两根支杆8的中部相铰接,同一对的两根支杆8位于沿竖直方向相对的两段滑轨7之间,滑轨7上安装有一个固定块9和一个滑动块10,一根支杆8的两端分别与固定板3所安装滑轨7上的固定块9和升降板4所安装滑轨7上的滑动块10铰接,另一根支杆8的两端分别与固定板3所安装滑轨7上的滑动块10和升降板4所安装滑轨7上的固定块9铰接,固定板3上安装有用于带动两个固定板3滑轨7上的滑动块10运动的第一电机11,本实施例中,固定板3和升降板4均为水平设置的矩形平板,四根支杆8的长度相等,固定块9位于滑轨7远离第一电机11的一端,滑动块10位于固定块9和第一电机11之间,通过滑动块10运动并带动支杆8转动,以便于改变升降板4和固定板3之间的距离。
[0025]
机械手组件包括安装在回转台5上的四边形连杆机构12、用于带动四边形连杆机构12转动的第二电机13、安装在四边形连杆机构12远离回转台5一侧的伸缩杆14、以及安装在伸缩杆14远离四边形连杆机构12一端的吸盘抓取机构,所述四边形连杆机构12的其中一根铰接轴安装在回转台5上,四边形连杆机构12的铰接轴均为水平设置,所述伸缩杆14的长度方向与四边形连杆机构12的铰接轴的长度方向相互垂直。所述吸盘抓取机构包括一块基板15,基板15上穿设有转轴,转轴的轴线与伸缩杆14的轴线对齐设置,基板15上开设有四段滑槽16,四段滑槽16沿转轴的周向均匀间隔设置,滑槽16的长度方向均朝向转轴,四段滑槽16上分别安装有各自的一个真空吸盘座17,真空吸盘座17位于基板15远离伸缩杆14的一侧,四个真空吸盘座17上分别安装有各自的真空吸盘18,四个真空吸盘18均朝向转轴的轴线方向设置。
[0026]
四个真空吸盘座17上分别铰接有一根连杆19,转轴上铰接有四根过渡杆20,四根过渡杆20分别与四根连杆19铰接,通过转轴旋转并带动过渡杆20转动,从而使连杆19带动真空吸盘座17沿滑槽16滑动,以便于四个真空吸盘18朝向转轴的轴线运动并配合吸附抓取苹果。升降板4上安装有一个用于承接被机械手组件所抓取苹果的漏斗21,所述苹果收集箱1的侧壁开口上安装有斜坡式管道23,漏斗21的底端与斜坡式管道的顶端之间连接有弹性管道22,机械手组件将四个真空吸盘18吸附抓取的苹果移动至漏斗21后,控制四个真空吸盘18停止吸附,就能使苹果从弹性管道22滚落至斜坡式管道23最终进入苹果收集箱1,并有效避免苹果在滚落过程中发生损伤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1