一种乒乓球回收装置
1.本实用新型涉及乒乓球辅助设备技术领域,特别涉及一种乒乓球回收装置。
背景技术:
2.乒乓球由于体积较小,质量较轻,且在运动过程中相互撞击,因此,在接打结束后,通常会掉落至离乒乓球台较远的地方。又由于在接打过程中无法准备过多的乒乓球,因此,当掉落一定数量的乒乓球时便需要开始回收这些乒乓球。
3.通常,在回收乒乓球时多是在离乒乓球台一定距离处设置阻拦网,且在阻拦网侧面安装有风机和收纳箱,被阻拦网拦截的乒乓球受到风机的吹动后进入收纳箱,完成乒乓球回收工作。然而,该方式仅能回收到被阻拦网拦截的乒乓球,若乒乓球未被阻拦网拦截,则无法回收,回收效率较低。并且,该方式需等乒乓球落至风机出风口附近时才能被吹动,过程耗时较长,因此,回收速度也较慢。
技术实现要素:
4.本实用新型提供一种乒乓球回收装置,可以解决相关技术中乒乓球回收效率低回收速度慢的问题。所述技术方案如下:
5.一种乒乓球回收装置,所述乒乓球回收装置包括车体、摄像头、控制器、球体拨动机构、斜面板和集球箱,其中,所述车体包括底板、第一侧面板、第二侧面板、第一轮组、第二轮组、第一车轮驱动电机和第二车轮驱动电机,所述底板的第一端开设有矩形凹槽,所述第一侧面板和所述第二侧面板分别垂直设置在所述底板顶面的两侧,且所述第一侧面板和所述第二侧面板互相平行,所述第一轮组设置在所述底板第一端的底面,所述第二轮组设置在所述底板第二端的底面,所述第一车轮驱动电机与所述第一轮组连接,所述第二车轮驱动电机与所述第二轮组连接;所述球体拨动机构包括第一支撑板、第二支撑板、第一齿轮驱动电机、直齿轮、中间传动轴、第一轴承、第二轴承、第三轴承、第四轴承、第一锥齿、第二锥齿、第一拨盘、第二拨盘、第一拨盘传动轴和第二拨盘传动轴,所述第一支撑板的两端、所述第二支撑板的两端分别与所述第一侧面板和所述第二侧面板连接,且所述第一支撑板和所述第二支撑板互相平行,所述第一轴承和所述第二轴承嵌设于所述第一支撑板内,所述第三轴承和所述第四轴承嵌设于所述第二支撑板内,所述第一拨盘传动轴的两端分别与所述第三轴承、所述第一拨盘连接,所述第一拨盘传动轴穿过所述第一轴承与所述第一支撑板垂直连接,所述第二拨盘传动轴的两端分别与所述第四轴承、所述第二拨盘连接,所述第二拨盘传动轴穿过所述第二轴承与所述第一支撑板垂直连接,所述第一齿轮驱动电机垂直卡设于所述第一支撑板和所述第二支撑板形成的空间内,所述第一齿轮驱动电机通过所述直齿轮与所述中间传动轴连接,所述中间传动轴的第一端通过所述第一锥齿与所述第一拨盘传动轴连接,所述中间传动轴的第二端通过所述第二锥齿与所述第二拨盘传动轴连接;所述斜面板上部的两端分别与所述第一侧面板和所述第二侧面板连接,所述斜面板下部穿过所述底板的矩形凹槽并位于所述底板的下方,所述斜面板倾斜于所述底板,所述集球箱设
置在所述底板第二端的顶面,所述集球箱靠近所述底板第一端的一侧与所述斜面板连接;所述摄像头设置与所述第二支撑板上,所述控制器设置在所述车体上,所述控制器分别与所述摄像头、所述第一齿轮驱动电机、所述第一车轮驱动电机和所述第二车轮驱动电机电连接。
6.可选地,所述乒乓球回收装置还包括球体传动机构,其中,所述球体传动机构包括第一滚筒、第二滚筒、第一同步带轮、第二同步带轮、同步带、第一齿轮、第二齿轮、第二齿轮驱动电机,其中,所述第一滚筒的两端、所述第二滚筒的两端分别与所述第一侧面板和所述第二侧面板连接,且所述第一滚筒中心线与所述第二滚筒中心线形成的平面平行于所述斜面板;所述第二齿轮驱动电机设置在所述底板上,所述第一同步带轮和所述第二齿轮固定套设在所述第一滚筒的传动轴上,所述第二同步带轮固定套设在所述第二滚筒的传动轴上,所述第二齿轮驱动电机通过所述第一齿轮与所述第二齿轮连接,所述第一同步带轮通过所述同步带与所述第二同步带轮连接;所述第二齿轮驱动电机与所述控制器电连接。
7.可选地,所述车体还包括前窗和顶板,其中,所述前窗的两端分别与所述第一侧面板和所述第二侧面板连接,所述前窗与所述斜面板平行,且所述前窗与所述斜面板之间的垂直距离大于待回收乒乓球的直径;所述顶板设置在所述第一侧面板和所述第二侧面板的顶部,所述顶板与所述第一侧面板和所述第二侧面板活动连接。
8.可选地,所述球体拨动机构还包括第一法兰和第二法兰,其中,所述第一拨盘传动轴的一端通过所述第一法兰与所述第一拨盘连接,所述第二拨盘传动轴的一端通过所述第二法兰与所述第二拨盘连接。
9.可选地,所述摄像头为可编程摄像头。
10.可选地,所述控制器为arduino单片机。
11.可选地,所述控制器分别与所述摄像头、所述第一齿轮驱动电机、所述第一车轮驱动电机和所述第二车轮驱动电机电连接包括:所述控制器通过蓝牙(bluetooth)传输方式分别与所述摄像头、所述第一齿轮驱动电机、所述第一车轮驱动电机和所述第二车轮驱动电机无线电连接;或,所述控制器通过无线保真(wireless
‑
fidelity)传输方式分别与所述摄像头、所述第一齿轮驱动电机、所述第一车轮驱动电机和所述第二车轮驱动电机无线电连接;或,所述控制器通过电缆分别与所述摄像头、所述第一齿轮驱动电机、所述第一车轮驱动电机和所述第二车轮驱动电机有线电连接。
12.本实用新型实施例提供的技术方案的有益效果至少包括:
13.乒乓球回收装置包括车体、摄像头、控制器、球体拨动机构、斜面板和集球箱,其中车体包括底板、第一侧面板、第二侧面板、第一轮组、第二轮组、第一车轮驱动电机和第二车轮驱动电机,球体拨动机构包括第一支撑板、第二支撑板、第一齿轮驱动电机、直齿轮、中间传动轴、第一轴承、第二轴承、第三轴承、第四轴承、第一锥齿、第二锥齿、第一拨盘、第二拨盘、第一拨盘传动轴和第二拨盘传动轴,斜面板穿过底板上的矩形凹槽,并倾斜设置于底板上下两侧,摄像头设置在第二支撑板上,控制器设置在车体上,控制器和摄像头以及各驱动电机电连接。
14.本实用新型提供的乒乓球回收装置在回收乒乓球时,摄像头根据拍摄的实时画面,确定乒乓球的具体方位以及装置的移动路径,并将移动路径发送至控制器,控制器根据接收到的移动路径控制第一车轮驱动电机和第二车轮驱动电机的启停,以将装置移动至乒
乓球所在位置处。当确定乒乓球位于装置正前方时,控制器控制第一齿轮驱动电机启停,以使第一拨盘和第二拨盘旋转,旋转的拨盘可以使位于正前方的乒乓球移动至斜面板的下部,当旋转拨盘将多个乒乓球移动至斜面板下部时,后到的乒乓球会将前到的乒乓球顶上斜面板,当乒乓球高于斜面板上部时则掉落至集球箱,完成乒乓球的回收工作。
15.本实用新型提供的乒乓球回收装置可以主动寻找掉落的乒乓球,并自动移动至乒乓球所在位置,通过拨盘和斜面板的方式可以准确、快速地将乒乓球拨动并收集至集球箱,乒乓球回收速度快、回收效率高。
附图说明
16.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
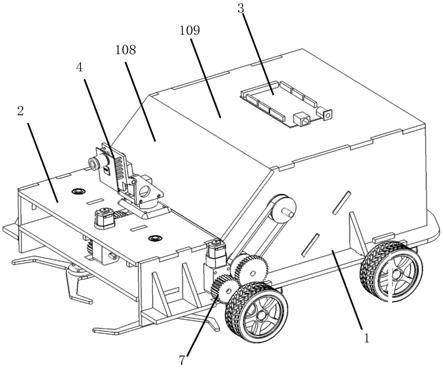
17.图1为本实用新型实施例提供的乒乓球回收装置的第一立体图;
18.图2为本实用新型实施例提供的乒乓球回收装置的第二立体图;
19.图3为本实用新型实施例提供的乒乓球回收装置的主视图;
20.图4为本实用新型实施例提供的乒乓球回收装置的内部结构立体图。
21.附图标记说明:
22.车体1;球体拨动机构2;控制器3;摄像头4;斜面板5;集球箱6;球体传动机构7;
23.底板101;第一侧面板102;第二侧面板103;第一轮组104;第二轮组105;第一车轮驱动电机106;第二车轮驱动电机107;前窗108;顶板109;第一支撑板201;第二支撑板202;第一齿轮驱动电机203;直齿轮204;中间传动轴205;第一轴承207;第二轴承207;第三轴承208;第四轴承209;第一锥齿210;第二锥齿211;第一拨盘212;第二拨盘213;第一拨盘传动轴214;第二拨盘传动轴215;第一法兰216;第二法兰217;第一滚筒701;第二滚筒702;第一同步带轮703;第二同步带轮704;同步带705;第一齿轮706;第二齿轮707;第二齿轮驱动电机708。
具体实施方式
24.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地详细描述。
25.图1为本实用新型实施例提供的乒乓球回收装置的第一立体图;
26.图2为本实用新型实施例提供的乒乓球回收装置的第二立体图;
27.图3为本实用新型实施例提供的乒乓球回收装置的主视图;
28.图4为本实用新型实施例提供的乒乓球回收装置的内部结构立体图。
29.参见图1至图4。一种乒乓球回收装置,包括车体1、摄像头4、控制器3、球体拨动机构2、斜面板5和集球箱6,其中,车体1包括底板101、第一侧面板102、第二侧面板103、第一轮组104、第二轮组105、第一车轮驱动电机106和第二车轮驱动电机107,底板101的第一端开设有矩形凹槽,第一侧面板102和第二侧面板103分别垂直设置在底板101顶面的两侧,且第一侧面板102和第二侧面板103互相平行,第一轮组104设置在底板101第一端的底面,第二
轮组105设置在底板101第二端的底面,第一车轮驱动电机106与第一轮组104连接,第二车轮驱动电机107与第二轮组105连接。球体拨动机构2包括第一支撑板201、第二支撑板202、第一齿轮驱动电机203、直齿轮204、中间传动轴205、第一轴承206、第二轴承207、第三轴承208、第四轴承209、第一锥齿210、第二锥齿211、第一拨盘212、第二拨盘213、第一拨盘传动轴214和第二拨盘传动轴215,第一支撑板201的两端、第二支撑板202的两端分别与第一侧面板102和第二侧面板103连接,且第一支撑板201和第二支撑板202互相平行,第一轴承206和第二轴承207嵌设于第一支撑板201内,第三轴承208和第四轴承209嵌设于第二支撑板202内,第一拨盘传动轴214的两端分别与第三轴承208、第一拨盘212连接,第一拨盘传动轴214穿过第一轴承206与第一支撑板201垂直连接,第二拨盘传动轴215的两端分别与第四轴承209、第二拨盘213连接,第二拨盘传动轴215穿过第二轴承207与第一支撑板201垂直连接,第一齿轮驱动电机203垂直卡设于第一支撑板201和第二支撑板202形成的空间内,第一齿轮驱动电机203通过直齿轮204与中间传动轴205连接,中间传动轴205的第一端通过第一锥齿210与第一拨盘传动轴214连接,中间传动轴205的第二端通过第二锥齿211与第二拨盘传动轴215连接;斜面板5上部的两端分别与第一侧面板102和第二侧面板103连接,斜面板5下部穿过底板101的矩形凹槽并位于底板101的下方,斜面板5倾斜于底板101,集球箱6设置在底板101第二端的顶面,集球箱6靠近底板101第一端的一侧与斜面板5连接;摄像头4设置与第二支撑板202上,控制器3设置在车体1上,控制器3分别与摄像头4、第一齿轮驱动电机203、第一车轮驱动电机106和第二车轮驱动电机107电连接。
30.需要说明的是,第一轮组104可以是两个独立的车轮,两个车轮设置在底板101第一端底面的两侧,第一轮组104也可以是由车轮轴连接的一体式轮组,此时车轮轴设置在底板101第一端的底面。第二轮组105可以是两个独立的车轮,也可以是由车轮轴连接的一体式轮组,第二轮组105的形式可以和第一轮组104相同也可以不同,本实用新型对此不作具体限定。当第一轮组104及第二轮组105为两个独立的车轮时,与第一轮组104或第二轮组105对应的车轮驱动电机为两个分体式的驱动电机,分体式的驱动电机分别与轮组中的两个车轮连接,用于独立控制车轮的转动。当第一轮组104及第二轮组105为由车轮轴连接的一体式轮组时,与第一轮组104或第二轮组105对应的车轮驱动电机为一体式驱动电机,一体式驱动电机与车轮轴连接,用于控制轮组。具体地,第一轮组104及第二轮组105均为两个独立的车轮,每个车轮均与一个分体式车轮驱动电机连接,通过第一车轮驱动电机106、第二车轮驱动电机107单独控制车轮,提高了车体1移动的便捷性和准确度。
31.在一种可能的实现方式中,车体1还包括前窗108和顶板109,其中,前窗108的两端分别与第一侧面板102和第二侧面板103连接,前窗108与斜面板5平行,且前窗108与斜面板5之间的垂直距离大于待回收乒乓球的直径;顶板109设置在第一侧面板102和第二侧面板103的顶部,顶板109与第一侧面板102和第二侧面板103活动连接。通过设置前窗108和顶板109,一方面可以提高车体1的整体刚性,使车体1具有更好的性能,另一方面还可以通过前窗108和顶板109,防止乒乓球从斜面板5进入集球箱6时,从车体1其他部位掉落,提高乒乓球回收效率。此外,前窗108和顶板109可以由透明材料制成,如由亚克力、玻璃等材料制成,以使乒乓球回收装置工作时,从外部可以看到内部的工作状态。
32.还需要说明的是,第一拨盘传动轴214和第二拨盘传动轴215可以为单直径传动轴,也可以为多直径阶梯状传动轴,当为多直径阶梯状传动轴时,传动轴中直径较大的一段
位于第一支撑板201和第二支撑板202直间的空间内,此时,第一锥齿210可以通过第一拨盘传动轴214上的台阶定位并固定在第一拨盘传动轴214上,第二锥齿211可以通过第二拨盘传动轴215上的台阶定位并固定在第二拨盘传动轴215上。第一拨盘212和第二拨盘213的形状为等角度三叶旋转状,每个叶片之间的夹角均为120
°
,第一拨盘212和第二拨盘213的叶片可以为直线型,也可以为刀柄型。在一种可能的实施例中,第一拨盘212和第二拨盘213的叶片均为刀柄型,从而可以提高第一拨盘212和第二拨盘213对乒乓球的拨动效率。在一种可能的实现方式中,球体拨动机构2还包括第一法兰216和第二法兰217,其中,第一拨盘传动轴214的一端通过第一法兰216与第一拨盘212连接,第二拨盘传动轴215的一端通过第二法兰217与第二拨盘213连接,从而提高第一拨盘212和第一拨盘传动轴214的连接牢固性,以及提高第二拨盘213和第二拨盘传动轴215的连接牢固性。
33.此外,第一侧面板102、第二侧面板103可以通过卡接、焊接等方式与底板101连接。具体地,当采用卡接时,可以在底板101表面设置矩形槽,在第一侧面板102和第二侧面板103上设置连接块,通过连接块卡入矩形槽的方式进行连接。第一车轮驱动电机106、第二车轮驱动电机107和第一齿轮驱动电机203可以通过焊接或电机连接件的方式与底板101连接。在一种可实现的方式中,第一车轮驱动电机106、第二车轮驱动电机107和第一齿轮驱动电机203通过电机连接件与底板101连接,以方便各电机与底板101的拆卸。第一支撑板201、第二支撑板202、斜面板5可以通过焊接、卡接的方式与第一侧面板102、第二侧面板103连接。在一种可实现的方式中,第一侧面板102和第二侧面板103上开设有多个槽孔,第一支撑板201、第二支撑板202、斜面板5设置有与槽孔对应的连接块,第一支撑板201、第二支撑板202、斜面板5通过连接块与槽孔实现与第一侧面板102和第二侧面板103的连接。
34.其中,集球箱6是用来盛装回收到的乒乓球的装置,集球箱6可以直接放置在底板101第二端的顶面上,也可以卡接或焊接在底板101第二端的顶面上,还可以通过滑轨与底板101连接,并沿底板101活动,本实用新型对集球箱6与底板101的连接方式不做具体限定。当集球箱6与底板101连接时,集球箱6靠近底板101第一端的一侧可以通过卡接、磁吸等方式与斜面板5连接。在一种可能的实现方式中,集球箱6直接放置在底板101第二端的顶面上,此时,集球箱6靠近底板101第一端的一侧通过卡接的方式与斜面板5连接。
35.其中,摄像头4是用来拍摄乒乓球回收装置前方的设备。摄像头4可以为单一摄像头4,也可以为多摄像头4,摄像头4越多,拍摄模式越多,拍摄效果越好。摄像头4可以直接与第二支撑板202连接,也可以通过三轴云台与第二支撑板202连接。在一种可能的实现方式中,乒乓球回收装置还包括三轴云台,摄像头4通过三轴云台与第二支撑板202连接,以便摄像头4在工作时,通过三轴云台调整摄像头4的拍摄角度,提高拍摄效率。
36.此外,摄像头4可以为普通摄像头4,也可以为可编程摄像头4。当摄像头4为普通摄像头4时,摄像头4在拍摄到图像时,将图像传输至控制器3,由控制器3识别图像中的内容,确定乒乓球的具体方位以及装置的移动路径。而当摄像头4为可编程摄像头4时,可以在摄像头4中输入图像识别算法,当摄像头4拍摄到图像时,可编程摄像头4可以根据图像识别算法识别图像中的内容,确定乒乓球的具体方位以及装置的移动路径。具体地,可编程摄像头4为openmv摄像头4。控制器3可以为plc控制器3,也可以为单片机。具体地,控制器3为arduino单片机。
37.需要说明的是,控制器3与摄像头4、第一齿轮驱动电机203、第一车轮驱动电机106
和第二车轮驱动电机107的连接方式可以采用有线连接方式或无线连接方式。当采用无线连接方式时,控制器3可以通过蓝牙(bluetooth)传输方式分别与摄像头4、第一齿轮驱动电机203、第一车轮驱动电机106和第二车轮驱动电机107无线电连接;或,控制器3通过无线保真(wireless
‑
fidelity)传输方式分别与摄像头4、第一齿轮驱动电机203、第一车轮驱动电机106和第二车轮驱动电机107无线电连接。当采用有线连接方式时,控制器3通过电缆分别与摄像头4、第一齿轮驱动电机203、第一车轮驱动电机106和第二车轮驱动电机107有线电连接。此外,乒乓球回收装置中还设置有电力供应设备。电力供应设备可以采用集中供电方式,即在车体1上电池,将电池与各器件连接,通过电池集中为各器件供电,还可以采用分布式供电方式,即在控制器3、摄像头4、第一齿轮驱动电机203、第一车轮驱动电机106和第二车轮驱动电机107上分别设置电池,各电池分别为对应的器件进行供电。
38.乒乓球回收装置包括车体1、摄像头4、控制器3、球体拨动机构2、斜面板5和集球箱6,其中车体1包括底板101、第一侧面板102、第二侧面板103、第一轮组104、第二轮组105、第一车轮驱动电机106和第二车轮驱动电机107,球体拨动机构2包括第一支撑板201、第二支撑板202、第一齿轮驱动电机203、直齿轮204、中间传动轴205、第一轴承206、第二轴承207、第三轴承208、第四轴承209、第一锥齿210、第二锥齿211、第一拨盘212、第二拨盘213、第一拨盘传动轴214和第二拨盘传动轴215,斜面板5穿过底板101上的矩形凹槽,并倾斜设置于底板101上下两侧,摄像头4设置在第二支撑板202上,控制器3设置在车体1上,控制器3和摄像头4以及各驱动电机电连接。
39.本实用新型提供的乒乓球回收装置在回收乒乓球时,摄像头4根据拍摄的实时画面,确定乒乓球的具体方位以及装置的移动路径,并将移动路径发送至控制器3,控制器3根据接收到的移动路径控制第一车轮驱动电机106和第二车轮驱动电机107的启停,以将装置移动至乒乓球所在位置处。当确定乒乓球位于装置正前方时,控制器3控制第一齿轮驱动电机203启停,以使第一拨盘212和第二拨盘213旋转,旋转的拨盘可以使位于正前方的乒乓球移动至斜面板5的下部,当旋转拨盘将多个乒乓球移动至斜面板5下部时,后到的乒乓球会将前到的乒乓球顶上斜面板5,当乒乓球高于斜面板5上部时则掉落至集球箱6,完成乒乓球的回收工作。
40.本实用新型提供的乒乓球回收装置可以主动寻找掉落的乒乓球,并自动移动至乒乓球所在位置,通过拨盘和斜面板5的方式可以准确、快速地将乒乓球拨动并收集至集球箱6,乒乓球回收速度快、回收效率高。
41.此外,为了进一步提高乒乓球的回收效率,乒乓球回收装置还可以包括球体传动机构7,其中,球体传动机构7包括第一滚筒701、第二滚筒702、第一同步带轮703、第二同步带轮704、同步带705、第一齿轮706、第二齿轮707、第二齿轮驱动电机708,其中,第一滚筒701的两端、第二滚筒702的两端分别与第一侧面板102和第二侧面板103连接,且第一滚筒701中心线与第二滚筒702中心线形成的平面平行于斜面板5;第二齿轮驱动电机708设置在底板101上,第一同步带轮703和第二齿轮707固定套设在第一滚筒701的传动轴上,第二同步带轮704固定套设在第二滚筒702的传动轴上,第二齿轮驱动电机708通过第一齿轮706与第二齿轮707连接,第一同步带轮703通过同步带705与第二同步带轮704连接;第二齿轮驱动电机708与控制器3电连接。
42.其中,第一滚筒701和第二滚筒702的半径可以相同也可以不同,第一滚筒701的中
心线到斜面板5的垂直距离需要大于乒乓球的直径与第一滚筒701半径之和,且第二滚筒702的中心线到斜面板5的垂直距离需要大于乒乓球的直径与第二滚筒702半径之和。第二齿轮驱动电机708可以通过蓝牙、无线保真或电缆等方式与控制器3电连接。若装置采用集中供电方式,则将电池与第二齿轮驱动电机708,通过电池为第二齿轮驱动电机708集中供电;若装置采用分布式供电方式,则在第二齿轮驱动电机708旁设置分布电池,通过分布电池为第二齿轮驱动电机708供电。
43.本实用新型实施例在进行乒乓球回收时,工作流程为:视觉识别寻找乒乓球——靠近目标并开启拨盘传动与滚轴传动——传动延时15秒后停止——再次寻找目标。
44.具体地,本实用新型提供的乒乓球回收装置在回收乒乓球时,摄像头4根据拍摄的实时画面,确定乒乓球的具体方位以及装置的移动路径,并将移动路径发送至控制器3,控制器3根据接收到的移动路径控制第一车轮驱动电机106和第二车轮驱动电机107的启停,以将装置移动至乒乓球所在位置处。当确定乒乓球位于装置正前方时,控制器3控制第一齿轮驱动电机203启停,以使第一拨盘212和第二拨盘213旋转,旋转的拨盘可以使位于正前方的乒乓球移动至斜面板5的下部,此时,第二齿轮驱动电机708起动,第一齿轮和第二齿轮分别带动第一滚筒701和第二滚筒702转动,转动的第一滚筒701和第二滚筒702可以将位于斜面板5的下部的乒乓球传动至斜面板5的上部,当乒乓球高于斜面板5上部时则掉落至集球箱6,完成乒乓球的回收工作。重复此工作流程,可以完成更多的乒乓球回收任务。并且,在乒乓球回收过程中,由于前窗108和顶板109的保护,乒乓球不会从车体1的其他部位掉落,保证了乒乓球回收工作的顺利进行。
45.本实用新型提供的乒乓球回收装置可以主动寻找掉落的乒乓球,并自动移动至乒乓球所在位置,通过拨盘和斜面板的方式可以准确、快速地将乒乓球拨动并收集至集球箱,乒乓球回收速度快、回收效率高。
46.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1