一种预应力张拉智能控制系统的制作方法
1.本实用新型涉及路桥施工与维护技术领域,特别涉及一种预应力张拉智能控制系统。
背景技术:
2.现行趋势下,桥梁道路建设中,预应力施工、预应力维修被广泛应用,其中关键工序——张拉,其施工质量的好坏,会直接影响结构的耐久性,目前预应力施工人工记录数据的情况普遍,真实质量状况难以掌握,预应力施工、维修不到位,会导致结构过早出现裂缝,下挠超限;而预应力不均匀将导致预应力筋的早期疲劳,危及桥梁使用寿命。
3.现有技术中,预应力张拉一般是千斤顶由油泵驱动进行预应力张拉,通过压力表读数获取控制张拉力;而预应力钢绞线的位移数据读取则通过位移传感器进行读取,而位移传感器一般在千斤顶的外周配合安装或者临时搭建支架系统安装位移传感器,相当于位移传感器一般位于千斤顶和锚点之间的位置;而实际上,在新的路桥施工时位移传感器在实际设置时能够保证预留空间进行安装,而对于路桥维修时的预应力处理则首要考虑的是千斤顶的配置空间,使得位移传感器很难有足够的空间进行配置,而当新的路桥施工时,每次位移传感器的安装的位置均会略有不同,也很难控制在安装误差范围之内,使得位移计量的初始和终止数据差别很大,不利于积累基础数据指导后续施工。
技术实现要素:
4.本实用新型要解决现有技术中的位移传感器的现行配置方式存在空间条件受限,导致基础施工数据积累存在误差大的技术问题,提供一种预应力张拉智能控制系统。
5.为了解决上述技术问题,本实用新型的技术方案具体如下:
6.一种预应力张拉智能控制系统,包括用于拉伸预应力钢绞线的千斤顶和用于预制预应力钢绞线的锚具,包括:
7.导向机构,其一端连接在所述锚具与施工体的安装连接端、且布置于所述千斤顶输出预应力钢绞线的伸长端;
8.所述导向机构包括一位移组件,所述位移组件能够受到输出预应力钢绞线接触其后产生的推移力,且能够与所述预应力钢绞线伸长时产生相同的位移值;
9.伸长值检测装置,其布置在所述导向机构远离所述锚具的一端,其用以检测所述位移值。
10.进一步地,导向机构包括:
11.导向安装部,其形成安装空间,所述千斤顶能够位于所述安装空间内。
12.进一步地,所述导向安装部包括:
13.安装盘,其能够安装在所述锚具与施工体的安装连接端;
14.三个固定柱,第一端与所述安装盘垂直且固定连接;
15.三个固定柱,连接在所述安装盘上时布置呈三角形;
16.连接环,其与所述三个固定柱的第二端垂直且固定连接;
17.所述三个固定柱之间形成形成的空间为所述安装空间。
18.进一步地,所述导向机构还包括:
19.导向壳体,其与所述连接环固定连接;
20.所述导向壳体呈中空的圆柱状。
21.进一步地,所述固定柱的长度大于所述千斤顶的长度,且述固定柱的长度为所述千斤顶的长度的1.2倍。
22.进一步地,所述导向壳体的长度方向开设有多个导向槽;
23.至少开设个以所述导向壳体截面呈度旋转对称的所述导向槽。
24.进一步地,所述位移组件包括:
25.滑动盘,其具有与所述导向槽对应设置的轨接部;
26.所述轨接部包括轨接端和限位端,所述限位端的宽度大于所述轨接端轨接端的宽度;
27.所述限位端能够螺接在所述轨接端上;
28.所述滑动盘的材质为不锈钢。
29.进一步地,所述滑动盘的第一侧能够包覆设置有第一缓冲层,所述第一缓冲层为橡胶或者聚四氟乙烯。
30.进一步地,所述伸长值检测装置为红外线测距仪;
31.所述红外线测距仪安装在一吊架上,以使得所述红外线测距仪的输出端朝向所述滑动盘的第二侧;
32.所述滑动盘的第二侧能够设置反射片;
33.所述吊架的第一端连接在所述导向壳体的第二端的周向。
34.进一步地,还包括有:
35.主控制器,其数据传输连接所述红外线测距仪的数据传输端;
36.所述主控制器由集成plc的中控设备和终端设备组成;
37.所述集成plc的中控设备和所述终端设备采用串口通讯进行数据交换。
38.本实用新型具有以下的有益效果:
39.本技术方案可有效的释放出更多的路桥施工、维护时预应力施工处理的施工空间,将位移的检测方式实现更加轻量化的处置方式,使得其适应性更强;并且在多数据积累的情况下,数据的差距更小,对于后续施工有指导性参考的重要意义。
附图说明
40.下面结合附图和具体实施方式对本实用新型作进一步详细说明。
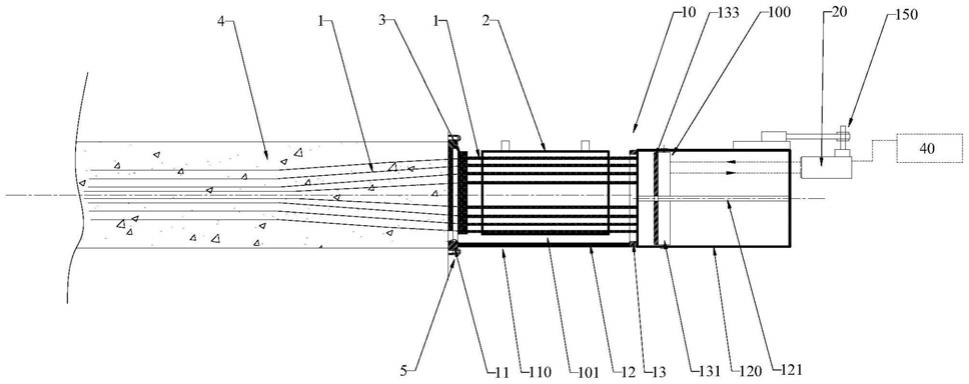
41.图1为本实用新型的结构示意图;
42.图2为本实用新型的导向安装部的示意图;
43.图3为本实用新型的导向壳体的示意图;
44.图中的附图标记表示为:
45.预应力钢绞线1、千斤顶2、锚具3、施工体4、安装连接端5;
46.导向机构10、位移组件100、伸长值检测装置20;
47.导向安装部110、安装空间101、安装盘11、固定柱12、连接环13;
48.导向壳体120、导向槽121;
49.滑动盘131、轨接部141、轨接端142、限位端143;
50.滑动盘131、第一缓冲层133、所述吊架150、主控制器40。
具体实施方式
51.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围;需要说明的是,本技术中为了便于描述,以当前视图中“左侧”为“第一端”,“右侧”为“第二端”,“上侧”为“第一端”,“下侧”为“第二端”,如此描述的目的在于清楚的表达该技术方案,不应当理解为对本技术技术方案的不当限定。
52.本实用新型要解决现有技术中的位移传感器的现行配置方式存在空间条件受限,导致基础施工数据积累存在误差大的技术问题,提供该预应力张拉智能控制系统,本技术方案的目的在于不采用现有技术利用位移传感器计量预应力钢绞线伸长以及将计量位置转移,以避免部分施工空间受限无法配置的问题。
53.请参阅图所示,一种预应力张拉智能控制系统,包括用于拉伸预应力钢绞线1的千斤顶2和用于预制预应力钢绞线1的锚具3,包括:
54.导向机构10,其一端连接在锚具3与施工体4的安装连接端、且布置于千斤顶2输出预应力钢绞线1的伸长端;导向机构10包括一位移组件100,位移组件100 能够受到输出预应力钢绞线1接触其后产生的推移力,且能够与预应力钢绞线1 伸长时产生相同的位移值;
55.本技术方案提出了一种新的安装方式,设计了导向机构10、及位移组件100,利用锚具3与施工体4的安装连接端进行安装,利用锚具3与施工体4的安装连接端,该位置在现有技术的施工方式完成后,当切割伸长的预应力钢绞线1后,会利用该位置螺接一安装罩,以封闭当前位置的多个切割后的预应力钢绞线1;显然,本技术方案可利用该结构,加装导向机构10、及位移组件100,位移组件100 能够被预应力施工过程中的预应力钢绞线1推动产生与伸长量相同的位移,再利用伸长值检测装置20,其布置在导向机构10远离锚具3的一端,其用以检测位移值,如此,伸长值检测装置20可在千斤顶2的第二端进行检测,检测的是其至位移组件100的长度,如此可得到预应力钢绞线1的位移值。基于上述,本技术方案在实际安装时,可不必再考虑应用现有技术位移传感器找不到适合的安装位置,理由在于,如导向机构10无法安装在利用锚具3与施工体4的安装连接端,则千斤顶2必然都无法安装,而伸长值检测装置20可配置在导向机构10上,则为后续检测提供了很大的便利,而锚具3与施工体4的安装连接端的位置使得伸长值检测装置20每次安装的位置,导向机构10固定的位置也更为固定,在多数据积累的情况下,数据的差距更小,对于后续施工有指导性参考的重要意义。
56.在一个具体的实施方式中,请参阅图1、2所示,导向机构10包括:导向安装部110,其形成安装空间101,千斤顶2能够位于安装空间101内。
57.导向安装部110包括:安装盘11,其能够安装在锚具3与施工体4的安装连接端5;三
个固定柱12,第一端与安装盘11垂直且固定连接,如此便于千斤顶2的其他配件具有配置空间,尤其是现有技术中智能千斤顶的广泛使用,为了使得油压可控,则会配置附属管路,三个固定柱12,连接在安装盘11上时布置呈三角形,在保证了结构稳定的同时,也兼顾了避免对于智能千斤顶附属部件的阻碍可能;另外,连接环13,其与三个固定柱12的第二端垂直且固定连接;三个固定柱12之间形成形成的空间为安装空间101。
58.进一步地,请参阅图1所示,导向机构10还包括:导向壳体120,其与连接环13固定连接;导向壳体120呈中空的圆柱状。
59.更为优选的实施方式中,固定柱12的长度大于千斤顶的长度,且述固定柱 12的长度为所述千斤顶的长度的1.2倍,以使得千斤顶在长度方向具有足够的安装配置空间,避免影响使用。
60.在一个具体的实施方式中,请参阅图1、3所示,导向壳体120的长度方向开设有多个导向槽121;至少开设4个以导向壳体120截面呈90度旋转对称的导向槽 121。以保证使用时的平衡性。
61.具体地,位移组件100包括:滑动盘131,其具有与导向槽121对应设置的轨接部141;轨接部141包括轨接端142和限位端143,限位端143的宽度大于轨接端轨接端142的宽度;限位端143能够螺接在轨接端142上,实现拆装方便;
62.滑动盘131的材质为不锈钢,保证自身具有足够的强度,滑动盘131的第一侧能够包覆设置有第一缓冲层133,第一缓冲层133为橡胶或者聚四氟乙烯,如此相当于预应力钢绞线1与滑动盘131避免刚性的直接接触,而预应力钢绞线1与滑动盘131接触后,相当于预应力钢绞线1逐渐推动滑动盘131,以便伸长值检测装置20工作。
63.在更为具体的实施方式中,请参阅图1所示,伸长值检测装置20为红外线测距仪;红外线测距仪安装在一吊架150上,以使得红外线测距仪的输出端朝向滑动盘131的第二侧;滑动盘131的第二侧能够设置反射片;吊架150的第一端连接在导向壳体120的第二端的周向。
64.当变更为红外线测距仪之后,实际上与现有技术中位移传感器相同,还可以通过主控制器40进行数据的采集,具体为主控制器40数据传输连接红外线测距仪的数据传输端;主控制器40由集成plc的中控设备和终端设备组成;集成plc 的中控设备和终端设备采用串口通讯进行数据交换,如此可实现plc和终端设备触摸屏组合方式,实施控制油泵和千斤顶的张拉,预应力智能张拉过程中以力值为控制对象,钢绞线伸长量为校核量,根据每台张拉设备的张拉力值和钢绞线张拉伸长量,进行分析判断。
65.综上所述,本技术方案可有效的释放出更多的路桥施工、维护时预应力施工处理的施工空间,将位移的检测方式实现更加轻量化的处置方式,使得其适应性更强;并且在多数据积累的情况下,数据的差距更小,对于后续施工有指导性参考的重要意义。
66.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1