一种全自动上下料机械手的爪手装置的制作方法
1.本实用新型涉及自动化设备技术领域,特别涉及一种全自动上下料机械手的爪手装置。
背景技术:
2.在工业化的今天,自动控制的机械手已经基本能够替代人工操作;由于机械手为物料上下线和生产物品组装提供极理想的助力搬运和组装工具,可完成重物抓取、搬运、翻转、对接、微调角度等三维空间移载动作,因而广泛用于工业生产中;全自动上下料机械手主要实现机床制造过程的完全自动化,并采用了集成加工技术,适用于生产线的上下料、工件翻转、工件转序等。
3.目前机械手根据驱动方式的分为液压驱动式、气压驱动式、电气驱动式和机械驱动式;其中液压驱动式、气压驱动式用得多,而液压驱动式机械手通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,导致驱动机构结构复杂,不方便维修,且维修时间较长。
技术实现要素:
4.本实用新型针对以上问题,提出一种全自动上下料机械手的爪手装置来解决上述问题。
5.本实用新型是这样实现的,一种全自动上下料机械手的爪手装置,包括固定壳,所述固定壳的下端面贯穿开设有开口,所述固定壳的内部设置有两个左右分布的转轴,两个所述转轴的两端分别贯穿固定壳的前后两端并延伸至固定壳的外部,且固定连接有爪手;
6.驱动机构,所述驱动机构设置于固定壳的内部,用于驱动爪手抓取零件。
7.为了便于驱动爪手的张开与闭合,作为本实用新型的一种全自动上下料机械手的爪手装置优选的,所述驱动机构包括安装在固定壳内部顶端的电推杆,所述电推杆的输出端安装有两个左右分布的齿条,两个所述齿条相对的一侧固定连接,两个所述转轴的外侧壁均固定连接有与齿条相匹配的齿轮。
8.为了增加零件的接触面积,作为本实用新型的一种全自动上下料机械手的爪手装置优选的,两个所述爪手相对的一侧均固定连接有凸块,两个所述凸块均呈“锯齿”状。
9.为了提高齿条的稳定性,作为本实用新型的一种全自动上下料机械手的爪手装置优选的,所述固定壳的内部前后两端均固定连接有滑轨,两个所述齿条的前后两端的连接处均固定连接有与滑轨相匹配的滑块。
10.为了提高零件的稳定性,防止零件掉落,作为本实用新型的一种全自动上下料机械手的爪手装置优选的,两个所述凸块相对一侧均固定连接有防滑垫。
11.为了保证爪手能正常转动,作为本实用新型的一种全自动上下料机械手的爪手装置优选的,两个所述爪手均呈“u”型,且镜像分布。
12.与现有技术相比,本实用新型的有益效果是:
13.该种全自动上下料机械手的爪手装置,通过驱动机构带动转轴转动,促使转轴带动两个爪手的张开与闭合,进而实现爪手抓取零件的效果,通过设置开口,进而增加驱动机构活动范围,提高爪手的张开度,通过设置该驱动机构,代替原有的驱动方式,使得该爪手的驱动装置结构简单,维修方便,进而有效降低维修时间,进而提高工作效率,降低经济损失。
附图说明
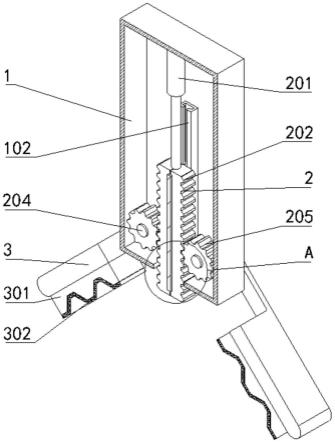
14.图1为本实用新型的一种全自动上下料机械手的爪手装置结构图;
15.图2为本实用新型的一种全自动上下料机械手的爪手装置剖面图;
16.图3为图2中a的局部放大图;
17.图4为本实用新型中驱动机构的结构图。
18.图中,1、固定壳;101、开口;102、滑轨;2、驱动机构;201、电推杆;202、齿条;203、滑块;204、转轴;205、齿轮;3、爪手;301、凸块;302、防滑垫。
具体实施方式
19.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
20.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
21.请参阅图1-4,一种全自动上下料机械手的爪手装置,包括固定壳1,固定壳1的下端面贯穿开设有开口101,固定壳1的内部设置有两个左右分布的转轴204,两个转轴204的两端分别贯穿固定壳1的前后两端并延伸至固定壳1的外部,且固定连接有爪手3;
22.驱动机构2,驱动机构2设置于固定壳1的内部,用于驱动爪手3抓取零件。
23.本实施例中:通过驱动机构2带动转轴204转动,促使转轴204带动两个爪手3的张开与闭合,进而实现爪手3抓取零件的效果,通过设置开口101,进而增加驱动机构2活动范围,提高爪手3的张开度,通过设置该驱动机构2,代替原有的驱动方式,使得该爪手3的驱动装置结构简单,维修方便,进而有效降低维修时间,进而提高工作效率,降低经济损失。
24.作为本实用新型的一种技术优化方案,驱动机构2包括安装在固定壳1内部顶端的电推杆201,电推杆201的输出端安装有两个左右分布的齿条202,两个齿条202相对的一侧固定连接,两个转轴204的外侧壁均固定连接有与齿条202相匹配的齿轮205。
25.本实施例中:电推杆201与外部电源连接,通过电推杆201带动齿条202上下移动,从而通过齿条202驱动齿轮205转动,促使转轴204跟随齿轮205转动,进而通过转轴204带动爪手3转动实现爪手3的张开与闭合,当机械手需要维修时,只需检查电推杆201是否正常或者齿轮205和齿条202有无磨损即可,从而达到了便于维修的的效果。
26.作为本实用新型的一种技术优化方案,两个爪手3相对的一侧均固定连接有凸块301,两个凸块301均呈“锯齿”状。
27.本实施例中:通过设置凸块301,且凸块301呈“锯齿”状,增加爪手3与零件的接触面积,提高零件的稳定性。
28.作为本实用新型的一种技术优化方案,固定壳1的内部前后两端均固定连接有滑轨102,两个齿条202的前后两端的连接处均固定连接有与滑轨102相匹配的滑块203。
29.本实施例中:齿条202上下移动时,滑块203在滑轨102的内部滑动,从而通过滑块203与滑轨102的设置,对齿条202起到导向作用,提高齿条202的稳定性。
30.作为本实用新型的一种技术优化方案,两个凸块301相对一侧均固定连接有防滑垫302。
31.本实施例中:通过设置防滑垫302,增加零件与凸块301之间的摩擦力,提高零件的稳定性,有效避免零件掉落的问题。
32.作为本实用新型的一种技术优化方案,两个爪手3均呈“u”型,且镜像分布。
33.本实施例中:通过两个爪手3均呈“u”型,且镜像分布,促使爪手3能正常转动。
34.本实用新型的工作原理及使用流程:使用时,首先启动电推杆201,通过电推杆201带动齿条202向上活向下移动,此时滑块203在滑轨102的内部滑动,当齿条202移动时,通过齿条202带动齿轮205转动,促使齿轮205带动转轴204转动,此时两个爪手3跟随转轴204转动,实现爪手3的张开与闭合来抓取零件,当齿条202向下移动时,齿条202通过开口101延伸至固定壳1的外部,提高了两个爪手3的张开度。
35.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1