1.本发明涉及智能设备技术领域,特别涉及,一种智能清洗机器人。
背景技术:2.现有的洗车方式有多种,其中使用加油站的配套自动洗车设备,车主需要在加油的时候定点的去消费,附带进行汽车的清洗,这些机器基本是采用桁架式的结构,占地面积大,一般放置在专用的清洗房中,无法用于家庭购置。另外由于设备重量较大,操作不当会有损坏车辆的风险,并且该设备清洗的质量不尽人意;去商铺洗车,需要车主定点去商铺进行清洗,并且价格相对来说并不便宜,几乎是全人工作业;车主自己人工清洗,受时间、空间、工具等制约,清洁不到位且清洗过程困难。
3.目前清洁机器人也是种类繁多,包括扫地擦地机器人、擦窗机器人、建筑物外墙清洁机器人,但是由于基本采用轮式或履带式结构,无法进行弧面和台阶面的清洗,灵活性受限。
4.针对上述问题,急需设计一种智能设备,解决现有技术存在的下述问题:1)洗车场所需要定点,设备相对较大,不可移动、携带;2)人工作业成本相对比较高,受时间、空间、工具制约;3)目前清洁机器人结构复杂,占地面积大,不易收纳存储,不适于家庭购置;4)现有清洁机器人只能针对平面进行擦洗,对弧面以及有台阶的平面无法完成擦洗;5)无法调节擦洗力度对于顽固污渍清洗不彻底,对于脆弱的表面容易造成划伤。
技术实现要素:5.针对上述缺陷,本发明解决的技术问题在于,提供一种智能清洗机器人,以解决现在技术所存在的只能针对平面进行擦洗,对弧面以及有台阶的平面无法完成擦洗;无法调节擦洗力度对于顽固污渍清洗不彻底,对于脆弱的表面容易造成划伤;体型大,不易收纳存储,不适于家庭购置的问题。
6.本发明提供了一种智能清洗机器人,包括:
7.储水仓,用于盛装并喷洒清洁液;
8.控制组件,与所述储水仓连接、且与所述储水仓电连接;
9.清洁主体,与所述储水仓连接、且与所述控制组件电连接,所述清洁主体包括若干与待清洗件抵接的擦拭件,若干所述擦拭件组成的形状可变、且与所述待清洗件外轮廓的形状适配;
10.移动组件,同时与所述清洁主体和所述待清洗件连接、且与所述控制组件电连接,所述移动组件设有若干组、且分别设置于所述清洁主体的两侧,所述移动组件用于带动所述清洁主体移动。
11.优选地,所述清洁主体还包括:
12.调压箱,与所述储水仓连接,所述调压箱上设有连通腔和若干与所述连通腔连通的缓冲腔;
13.气泵,与所述储水仓连接、且与所述控制组件电连接,所述气泵与所述调压箱连通,用于调节所述调压箱内气体的压强;
14.活动连接件,一端与所述调压箱滑动连接,另一端与所述擦拭件连接,所述活动连接件沿所述缓冲腔的设置方向滑动,所述擦拭件和所述缓冲腔均与所述活动连接件一一对应;
15.弹性件,一端与所述调压箱连接,另一端与所述活动连接件连接,所述弹性件设置于所述缓冲腔内。
16.优选地,所述移动组件包括:
17.关节连接件,与所述调压箱转动连接,所述关节连接件与所述调压箱之间设有关节驱动器,所述关节驱动器用于调节所述关节连接件与所述调压箱之间的角度;
18.大腿,通过第一驱动器与所述关节连接件转动连接,所述第一驱动器用于调节所述大腿与所述关节连接件之间的角度;
19.小腿,通过第二驱动器与所述大腿转动连接,所述第二驱动器用于调节所述小腿与所述大腿之间的角度;
20.吸附组件,与所述小腿连接、且与所述控制组件电连接,用于与所述待清洗件连接固定或分离。
21.优选地,所述储水仓包括:
22.水仓主体,一侧与所述清洁主体连接,另一侧与所述控制组件连接,所述水仓主体为中空的结构,用于存储清洁液;
23.水仓盖,与所述水仓主体可拆卸连接,所述水仓盖上设有注水口;
24.喷水头,与所述水仓主体连通,所述喷水头沿所述水仓主体的边缘并排设有若干个,用于向所述待清洗件的表面喷洒清洁液。
25.优选地,所述水仓主体包括:
26.储水部,与所述水仓盖连接,所述储水部为管状结构;
27.安装部,与所述储水部一体成型、且与所述储水部连通,所述安装部与所述清洁主体连接,所述安装部与所述储水部组成l形结构,所述安装部上设有用于安装所述控制组件的安装平台,若干所述喷水头与所述安装部连通。
28.优选地,所述控制组件包括:
29.控制仓,与所述水仓主体连接、且设置于所述安装平台上;
30.控制器,设置于所述控制仓内、且同时与所述储水仓、所述清洁主体和所述移动组件电连接;
31.图像采集器,设置于所述控制仓远离所述储水部的一侧、且与所述控制器电连接,用于采集所述待清洗件表面的图像信息;
32.供电模块,设置于所述控制仓内、且与所述控制器电连接。
33.优选地,所述吸附组件包括:
34.吸盘,与所述小腿连接、且与所述待清洗件抵接;
35.真空发生器,与所述小腿连接、且与所述控制组件电连接,所述真空发生器与所述吸盘连通,用于使所述吸盘与所述待清洗件连接固定或分离。
36.优选地,所述小腿包括:
37.连接部,一端与所述大腿转动连接;
38.支撑部,一端与所述连接部的另一端一体成型,另一端同时与所述吸盘和所述真空发生器连接,所述支撑部与所述连接部之间夹角为钝角。
39.优选地,还包括蓄水组件,所述蓄水组件包括:
40.水管,与所述注水口可拆卸连接,用于向所述注水口内注入所述清洁液;
41.蓄水盖,与所述水管连接,所述水管与所述蓄水盖之间设有注水泵;
42.蓄水桶,与所述蓄水盖连接、且与所述水管连通,用于储存所述清洁液。
43.优选地,所述移动组件设有四组或六组或八组、且对称设置于所述清洁主体的两侧;所述擦拭件与所述活动连接件之间通过减震柔性件连接,所述减震柔性件用于减小所述擦拭件与所述待清洗件之间的压力。
44.由上述方案可知,本发明提供的一种智能清洗机器人是一种对商户或者个人都可用的智能清洗机器人,属于智能家居设备,可代替人工,方便携带,能够对任意复杂表面进行清洁,通过擦拭件位置可变的结构设置,可以更好的贴合待清洗件的表面,达到更好的清洁效果,同时该结构采用仿生结构,结构紧凑,运动灵活,收纳、携带、使用方便。该装置不止可以用于洗车还可以用于洗玻璃、地面、建筑外墙面、汽车飞机等交通工具、管道内壁和外壁清洁,减少了人们繁琐的劳动,避免了相关的清洁工人在危险环境中工作,保护人员和财产安全。本发明解决现在技术所存在的只能针对平面进行擦洗,对弧面以及有台阶的平面无法完成擦洗;无法调节擦洗力度对于顽固污渍清洗不彻底,对于脆弱的表面容易造成划伤;体型大,不易收纳存储,不适于家庭购置的问题,作用效果显著,适于广泛推广。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
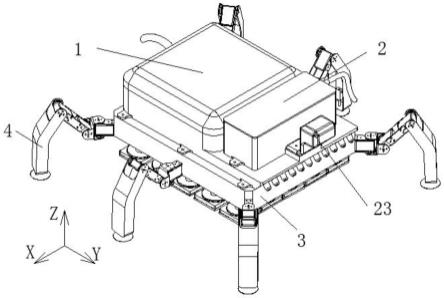
46.图1为本发明提供的一种智能清洗机器人的结构示意图;
47.图2为本发明提供的一种智能清洗机器人的爆炸结构示意图;
48.图3为本发明提供的一种智能清洗机器人的主视结构示意图;
49.图4为本发明提供的一种智能清洗机器人的蓄水组件的结构示意图;
50.图5为沿图3中a-a线的剖视结构图;
51.图6为本发明提供的一种智能清洗机器人的储水仓的结构示意图;
52.图7为本发明提供的一种智能清洗机器人的清洁主体的结构示意图;
53.图8为本发明提供的一种智能清洗机器人的活动连接件的结构示意图;
54.图9为本发明提供的一种智能清洗机器人的移动组件的结构示意图;
55.图10为本发明提供的另一种智能清洗机器人的移动组件的结构示意图。
56.图1-10中:
57.1、储水仓;2、控制组件;3、清洁主体;4、移动组件;5、蓄水组件;11、水仓主体;12、水仓盖;13、喷水头;21、控制仓;22、控制器;23、图像采集器;24、供电模块;31、擦拭件;32、调压箱;33、气泵;34、活动连接件;35、弹性件;36、减震柔性件;37、密封垫;41、关节连接件;
42、大腿;43、小腿;44、吸盘;45、真空发生器;46、关节驱动器;47、第一驱动器;48、第二驱动器;49、万向转动组件;51、水管;52、蓄水盖;53、蓄水桶;111、储水部;112、安装部;121、注水口;211、控制箱;212、控制盖;321、连通腔;322、缓冲腔;431、连接部;432、支撑部;491、导向块;492、活动弹簧;493、活动杆;494、球轴承;1121、安装平台。
具体实施方式
58.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
59.现有的扫地擦地机器人采用轮子驱动只能对平整的地面进行清洁,如果地面有台阶就无法进行清洁。使用轮子也会经常出现缠线和打滑情况影响清扫。轮子仅仅有一个旋转和一个平面移动自由度,自由度少,机器人在运动时容易出现死角出现清扫不干净的情况。擦窗机器人只能进行单扇窗户的擦洗,如果窗户之间有隔断隔开无法越过隔断进行擦洗。只能进行平面玻璃的擦洗,如果有弧度无法擦洗。一般使用单个吸盘吸住玻璃,吸盘有时候吸力不足,会掉下来,造成安全隐患。建筑物外墙清洁机器人使用效果不好,现有技术不成熟,目前多为人工清洁。
60.请一并参阅图1至图9,现对本发明提供的一种智能清洗机器人的一种具体实施方式进行说明。该种智能清洗机器人包括储水仓1、控制组件2、清洁主体3、移动组件4,其中储水仓1用于盛装并喷洒清洁液;控制组件2与储水仓1连接、且与储水仓1电连接;清洁主体3与储水仓1连接、且与控制组件2电连接,清洁主体3包括若干与待清洗件抵接的擦拭件31,若干擦拭件31之间相互独立,组成的形状可变、且与待清洗件外轮廓的形状适配;移动组件4同时与清洁主体3和待清洗件连接、且与控制组件2电连接,移动组件4设有若干组、且分别设置于清洁主体3的两侧,移动组件4用于带动清洁主体3移动。
61.为方便说明,请参阅图1,以空间任一点为原点,以控制组件2相对于清洁主体3的设置方向为z轴,以移动组件4相对于清洁主体3的设置方向为x轴,以与x轴、z轴同时垂直的直线方向为y轴,建立直角坐标系,其中,xy平面为水平面,水平面上指示的方向为水平方向,z轴指示方向为竖直方向。
62.在本实施例中,移动组件4设有四组或六组或八组、且沿y轴对称设置于清洁主体3的两侧,位于同侧的若干移动组件4沿x轴方向过清洁主体3中心线的直线对称设置。从中心向两侧,移动组件4的设置方向与x轴之间夹角越来越大。清洁主体3与若干移动组件4共同组成以蜘蛛为仿生模型的仿生结构,该结构为六足但不限于六足的移动结构。清洁主体3为可调节擦拭装置,擦拭件31可以为柔性吸水材料,如棉布、海绵等,若干擦拭件31并排设置,可以随着擦洗的平面进行自适应贴合。
63.与现有技术相比,该种智能清洗机器人属于智能家居设备,是一种基于多足机器人的、便捷式可携带、小型化的、可以对任意面进行擦洗的清扫机器人,该装置不止可以用于洗车还可以用于洗玻璃、地面、建筑外墙面、汽车飞机等交通工具、管道内壁和外壁清洁,减少了人们繁琐的劳动,避免了相关的清洁工人在危险环境中工作,保护人员和财产安全。该装置用于洗车,可以提高车主洗车便捷性,取代占用空间但效果不好的自动洗车场所。通
过擦拭件31位置可变的结构设置,可以更好的贴合待清洗件的表面,达到更好的清洁效果,同时该结构采用仿生结构,结构紧凑,运动灵活,收纳、携带、使用方便,作用效果显著,适于广泛推广
64.作为本发明的另一种实施方式,该种智能清洗机器人的结构与上述实施例中的结构基本相同,其不同之处在于,清洁主体3还包括调压箱32、气泵33、活动连接件34、弹性件35,其中调压箱32与储水仓1连接,调压箱32上设有连通腔321和若干与连通腔321连通的缓冲腔322;气泵33与储水仓1连接、且与控制组件2电连接,气泵33与调压箱32连通,用于调节调压箱32内气体的压强;活动连接件34的一端与调压箱32滑动连接,另一端与擦拭件31连接,活动连接件34沿缓冲腔322的设置方向滑动,擦拭件31和缓冲腔322均与活动连接件34一一对应;弹性件35的一端与调压箱32连接,另一端与活动连接件34连接,弹性件35设置于缓冲腔322内,可以为弹簧。
65.控制组件2获取待清洗件表面的结构信息,分析得到清洗过程中需要施加的压力信息,将工作信号传输至气泵33,气泵33向调压箱32内充气,连通腔321内气压升高,推动活动连接件34沿缓冲腔322向外运动,直至擦拭件31与待清洗件表面抵接并施加需要的压力,连通腔321内设有压力传感器,压力传感器获取连通腔321内的压力信息并传输至控制组件2,通过气泵33控制连通腔321内的气压,以适应待清洗件表面形状变化从而带动各个擦拭件31组成的形状变化时,各个活动连接件34在缓冲腔322内位置的变化,连通腔321内压强的变化,从而保证擦拭过程中待清洗件表面受到的压力的稳定性。通过气泵33、调压箱32、活动连接件34和弹性件35的配合,清洁主体3可实现调节擦拭件31和擦洗平面的接触压力。
66.在本实施例中,擦拭件31与活动连接件34之间通过减震柔性件36连接,减震柔性件36可以为海绵柔性橡胶块,用于减小擦拭件31与待清洗件之间的压力与冲击力,避免擦拭件31升降过程中与待清洗件表面突然接触造成的表面损伤;活动连接件34与调压箱32之间设有用于保证缓冲腔322内压强的密封垫37,密封垫37可以为软橡胶,保证了调节箱32不会漏气;调压箱32上还设有用于安装固定关节驱动器46的铰链。活动连接件34包括活塞杆和安装法兰,活塞杆一端通过密封垫37与调压箱32密封滑动连接,另一端通过安装法兰与减震柔性件36连接;安装法兰与减震柔性件36之间设有万向节,万向节可以保证擦拭件31相对活动连接件34有个旋转,能够更加紧贴弧形擦洗面。
67.示例性的,调压箱32上设有5*5个缓冲腔322,对应设有5*5个擦拭件31。每块擦拭布连接在每个安装法兰上,安装法兰上连接有小型活塞,这样擦拭布按压在弧面的平面上时不同的擦拭布会随着活塞的上下平移紧贴在弧形表面上。各个缓冲腔322远离活动连接件34的一端都是通过连通腔321相互连通在一起的,这样可以保持每个缓冲腔322里的气压保持一致,由于活动连接件34是连接着擦拭件31的,因此可以保证每块擦拭件31对弧形表面上施加的力是相同的。由于气泵33与调压箱32连通,用户可以通过气泵33调节连通腔321内气压,进而达到调节擦洗时对擦洗面的按压力。对于容易划伤的表面如漆面擦洗时可以调小擦洗压力,起到保护漆面的作用。对于顽固的污渍可以调大按压力起到高效清洁的作用。
68.作为本发明的另一种实施方式,该种智能清洗机器人的结构与上述实施例中的结构基本相同,其不同之处在于,移动组件4包括关节连接件41、大腿42、小腿43、吸附组件,其中关节连接件41与调压箱32转动连接,关节连接件41与调压箱32之间设有关节驱动器46,
关节驱动器46用于调节关节连接件41与调压箱32之间的角度;大腿42通过第一驱动器47与关节连接件41转动连接,第一驱动器47用于调节大腿42与关节连接件41之间的角度;小腿43通过第二驱动器48与大腿42转动连接,第二驱动器48用于调节小腿43与大腿42之间的角度;吸附组件通过万向调节组件49与小腿43连接、且与控制组件2电连接,用于与待清洗件连接固定或分离,万向调节组件49可以保证吸附组件与小腿43之间连接灵活性更高,保证吸附组件与待清洗表面连接更紧密。
69.在本实施例中,万向调节组件49包括导向块491、活动杆492、活动弹簧493和活动轴承494,导向块491与小腿43连接;活动杆492的一端与导向块491滑动连接,另一端与活动轴承494固定连接;活动弹簧493的一端与导向块491固定连接,另一端与活动轴承494固定连接,活动弹簧493穿套于互动杆492上;活动轴承494为球轴承,吸盘44贯穿活动轴承494与导向块491连接。增加球轴承的目的是能够使吸盘44和小腿43之间实现非刚性的连接,能够与待吸附的弧形面紧密贴合。活动杆492与活动弹簧493一一对应,活动弹簧493沿导向块491周向设有若干个,示例性的设有三个活动弹簧493,其目的是在机器人的足部抬起时,吸盘44能够复原初始状态。
70.在本实施例中,吸附组件包括吸盘44和真空发生器45,其中吸盘44与小腿43连接、且与待清洗件抵接;真空发生器45与小腿43连接、且与控制组件2电连接,真空发生器45与吸盘44连通,用于使吸盘44与待清洗件连接固定或分离。吸附组件还可以为安装在小腿43远离大腿42一端的电磁铁,电磁铁的通断实现与待清洗件表面的吸附连接与分离。在此,只要能够实现上述吸附组件相关性能作用的均在本技术文件保护的范围之内。关节驱动器46、第一驱动器47和第二驱动器48均可以为用于驱动对应结构旋转的电机。
71.在本实施例中,小腿43包括连接部431和与连接部431一体成型的支撑部432,连接部431远离支撑部432的一端与大腿42转动连接,支撑部432远离连接部431的一端同时与吸盘44和真空发生器45连接,支撑部432与连接部431之间夹角为钝角,钝角的设置可以很好的避免干涉,可以保证小腿43有更大的运动空间,支撑移动效果更好。为方便说明,对小腿43进行了人为划分,在此只要能实现小腿43功能的均在本技术保护范围内。
72.作为本发明的另一种实施方式,该种智能清洗机器人的结构与上述实施例中的结构基本相同,其不同之处在于,储水仓1包括水仓主体11、水仓盖12、喷水头13,其中水仓主体11的一侧与清洁主体3连接,另一侧与控制组件2连接,水仓主体11为中空的结构,用于存储清洁液;水仓盖12与水仓主体11可拆卸连接,水仓盖12上设有注水口121;喷水头13与水仓主体11连通,喷水头13沿水仓主体11的边缘并排设有若干个,用于向待清洗件的表面喷洒清洁液。
73.在本实施例中,若干喷水头13上均设有与控制组件2电连接的控制阀,控制阀用于控制对应喷水头13的通断;喷水头13斜向下设置;注水口121设置于水仓盖12远离控制组件2的控制仓21的一侧;喷水头13设置于控制组件2的图像采集器23远离控制仓21的一侧。控制组件2根据待清洁表面的脏污情况确定喷水量,输出控制信号,控制控制阀的开启量,从而控制各个喷水头13的出水量,实现智能调节喷洒量的功能。
74.在本实施例中,水仓主体11包括储水部111、安装部112,其中储水部111与水仓盖12连接,储水部111为管状结构;安装部112与储水部111一体成型、且与储水部111连通,安装部112与清洁主体3连接,安装部112与储水部111组成l形结构,安装部112上设有用于安
装控制组件2的安装平台1121,若干喷水头13与安装部112连通。为方便说明,对水仓主体11进行了人为划分,在此只要能实现水仓主体11相关性能作用的均在本技术的保护范围内。水仓主体11的结构即可容纳更多的水源,也可以对控制组件2进行限位固定及支撑,结构紧凑。
75.作为本发明的另一种实施方式,该种智能清洗机器人的结构与上述实施例中的结构基本相同,其不同之处在于,控制组件2包括控制仓21、控制器22、图像采集器23、供电模块24,其中控制仓21与水仓主体11连接、且设置于安装平台1121上;控制器22设置于控制仓21内、且同时与储水仓1、清洁主体3和移动组件4电连接;图像采集器23设置于控制仓21远离储水部111的一侧、且与控制器22电连接,用于采集待清洗件表面的图像信息;供电模块24设置于控制仓21内、且与控制器22电连接。
76.在本实施例中,气泵33设置于控制仓21内;控制仓21包括控制箱211和与控制箱211可拆卸连接的控制盖212;图像采集器23可以为相机,以视觉引导,赋予机器人智能的行动。供电模块24可以为可以充电的电池,用于为该装置的运行提供电能。
77.作为本发明的另一种实施方式,该种智能清洗机器人的结构与上述实施例中的结构基本相同,其不同之处在于,还包括蓄水组件5,蓄水组件5包括水管51、蓄水盖52、蓄水桶53,其中水管51与注水口121可拆卸连接,用于向注水口121内注入清洁液;蓄水盖52与水管51连接,水管51与蓄水盖52之间设有注水泵;蓄水桶53与蓄水盖52连接、且与水管51连通,用于储存清洁液。当储水仓1内水量减少时,将水管51与注水口121连接,对储水仓1进行注水。
78.作为本发明的另一种实施方式,该种智能清洗机器人的结构与上述实施例中的结构基本相同,其不同之处在于,水仓主体11与连通腔321连通,水仓主体11与连通腔321之间设有水压调节泵,水压调节泵用于控制连通腔321内的水压,实现擦拭件31与擦洗表面间压力的调节;活动连接件34与缓冲腔322连通,活动连接件34上设有用于控制缓冲腔322内液体流入的控制阀,活动连接件34远离缓冲腔322的一端与擦拭件31连接,用于为擦拭件31提供清洗用水,同时可以对擦拭件31进行冲洗;擦洗完毕后,启动气泵33,关闭水压调节泵,向连通腔321内充气,同时气泵33上设有加热装置,使得气泵33吹出的为热风,热风一方面继续保证连通腔321内的压强,另一方面通过控制阀经过活动连接件34对擦拭件31进行烘干,烘干的擦拭件31可以将清洁表面擦干。需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
79.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
80.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一
致的最宽的范围。