一种机器人自动锯铣工作站的制作方法
1.本实用新型涉及锯铣加工技术领域,特别是涉及一种机器人自动锯铣工作站。
背景技术:
2.目前的行李架在加工时,先用锯切机对行李架进行锯切,然后人工操作加工中心对行李架进行铣削,这样的加工方式在生产过程中,存在几个缺点:1、加工精度低,调节不方便2、作业效率不高,浪费时间和精力,满足不了客户生产需求。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种机器人自动锯铣工作站,翻转多工位平台多个工位循环使用,在六轴机器人对一侧的产品加工时,并不影响另一侧拆装产品,大大提高了作业效率;六轴机器人辅助加工,大大提高了加工精度。
4.本实用新型解决其技术问题所采用的技术方案是:提供一种机器人自动锯铣工作站,包括工作站,所述的工作站前端内安装有翻转多工位平台,该工作站前端对应翻转多工位平台开设有窗口,所述的工作站内部位于翻转多工位平台后方设置有多个六轴机器人,所述的六轴机器人的输出端设置有铣削装置和锯切装置,所述的翻转多工位平台包括翻转平台以及两个支柱,所述的工作站顶部的下端竖直布置有两个支柱,两个支柱之间转动安装有翻转平台,所述的翻转平台呈长方体框架结构,该翻转平台由四块长方形板以及两块方形板拼接组成,每两个相连的长方形板之间均设置有一挡板,每个长方形板的外侧均并排布置有两个安装工位,其中一个支柱安装有驱动翻转平台转动的变位机。
5.作为对本实用新型所述的技术方案的一种补充,所述的窗口的两侧各竖直安装有一感应光栅。
6.作为对本实用新型所述的技术方案的一种补充,所述的包括转动基座、机械手臂和动力装置,所述的转动基座下端安装有机械手臂以及驱动机械手臂的动力装置,该机械手臂的自由端安装有铣削装置和锯切装置。
7.作为对本实用新型所述的技术方案的一种补充,所述的铣削装置包括铣削电机和铣削刀具,所述的铣削电机的输出轴上连接有铣削刀具。
8.作为对本实用新型所述的技术方案的一种补充,所述的锯切装置包括锯切电机和锯切刀具,所述的锯切电机的输出轴上连接有锯切刀具。
9.作为对本实用新型所述的技术方案的一种补充,所述的机械手臂的自由端对应铣削装置和锯切装置设置有吹气装置。
10.作为对本实用新型所述的技术方案的一种补充,每个长方形板的外侧中部均安装有一纵向隔条,两个安装工位分别布置在纵向隔条的两侧。
11.作为对本实用新型所述的技术方案的一种补充,每个安装工位均包括两个定位块以及两个垫块组,所述的长方形板的外侧壁上从纵向隔条往方形板方向依次安装有并列布置的两个定位块以及两个垫块组,每个定位块上均沿着长度方向开设有多个安装孔位。
12.作为对本实用新型所述的技术方案的一种补充,所述的工作站前端安装有控制显示屏。
13.有益效果:本实用新型涉及一种机器人自动锯铣工作站,先把铣削工装放到工作站的翻转多工位平台上固定,把产品放到铣削工装上夹紧,六轴机器人对产品进行锯切和铣削处理,锯切铣削完成后,六轴机器人回到原位,铣削工装松开产品拿走,检查产品锯铣的尺寸合格;翻转多工位平台多个工位循环使用,在六轴机器人对一侧的产品加工时,并不影响另一侧拆装产品,大大提高了作业效率;六轴机器人辅助加工,大大提高了加工精度。
附图说明
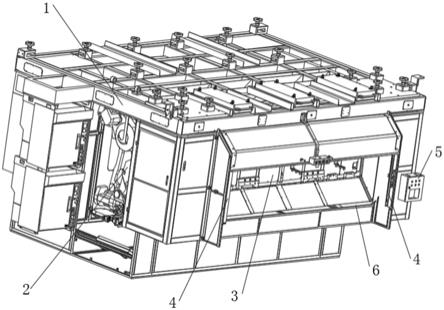
14.图1是本实用新型的结构示意图;
15.图2是本实用新型所述的六轴机器人的结构示意图;
16.图3是本实用新型所述的翻转多工位平台的结构示意图。
17.图示:1、工作站,2、六轴机器人,3、翻转多工位平台,4、感应光栅,5、控制显示屏,6、窗口,7、转动基座,8、机械手臂,9、动力装置,10、吹气装置,11、支柱,12、锯切电机,13、锯切刀具,14、铣削电机,15、铣削刀具,16、变位机,17、翻转平台,18、挡板,19、纵向隔条,20、定位块,21、安装孔位,22、垫块组。
具体实施方式
18.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
19.本实用新型的实施方式涉及一种机器人自动锯铣工作站,如图1-3所示,包括工作站1,所述的工作站1前端内安装有翻转多工位平台3,该工作站1前端对应翻转多工位平台3开设有窗口6,所述的工作站1内部位于翻转多工位平台3后方设置有多个六轴机器人2,所述的六轴机器人2的输出端设置有铣削装置和锯切装置,所述的翻转多工位平台3包括翻转平台17以及两个支柱11,所述的工作站1顶部的下端竖直布置有两个支柱11,两个支柱11之间转动安装有翻转平台17,所述的翻转平台17呈长方体框架结构,该翻转平台17由四块长方形板以及两块方形板拼接组成,每两个相连的长方形板之间均设置有一挡板18,每个长方形板的外侧均并排布置有两个安装工位,其中一个支柱11安装有驱动翻转平台17转动的变位机16。
20.所述的六轴机器人2共有两台,地面安装且在工作站1内部,负载60kg臂展1960mm,重复定位精度:0.06mm,重复路径精度0.09mm。六轴机器人2配套的控制柜主频50-60hz,(扩展安全选项及safemove:8路功能启动安全输出、8路检测输出)。
21.所述的翻转多工位平台3上配有电磁式传感器,用于检测翻转多工位平台3是否到位。
22.所述的窗口6的两侧各竖直安装有一感应光栅4,感应光栅4感应到员工在作业范围内设备不能自动运行。
23.所述的包括转动基座7、机械手臂8和动力装置9,所述的转动基座7下端安装有机
械手臂8以及驱动机械手臂8的动力装置9,该机械手臂8的自由端安装有铣削装置和锯切装置。
24.所述的工作站1前端安装有控制显示屏5,控制显示屏5具有自动、手动节目,工装位置设定界面,程序选择界面,还配置独立的快捷启动装置。工作站1外侧还设置有急停按钮,操作台及作业员启动位置按下急停,设备报警并停止。
25.所述的铣削装置包括铣削电机14和铣削刀具15,所述的铣削电机14的输出轴上连接有铣削刀具15,铣削电机14转速可控,在控制显示屏5上显示实际转速。
26.所述的锯切装置包括锯切电机12和锯切刀具13,所述的锯切电机12的输出轴上连接有锯切刀具13,锯切电机12转速可控,在控制显示屏5上显示实际转速。
27.所述的机械手臂8的自由端对应铣削装置和锯切装置设置有吹气装置10。
28.每个长方形板的外侧中部均安装有一纵向隔条19,两个安装工位分别布置在纵向隔条19的两侧。
29.每个安装工位均包括两个定位块20以及两个垫块组22,所述的长方形板的外侧壁上从纵向隔条19往方形板方向依次安装有并列布置的两个定位块20以及两个垫块组22,每个定位块20上均沿着长度方向开设有多个安装孔位21,每个垫块组22包括两个垫块。工装底板放到一个垫块组22以及两个定位块20上,若工装底板比较长时,则工装底板放到两个垫块组22以及两个定位块20上,然后将工装底板上的安装孔与定位块20上的安装孔位21对准并装入连接件固定,连接件可以是螺钉。
30.先把铣削工装放到工作站1的翻转多工位平台3上固定,把产品放到铣削工装上夹紧,六轴机器人2对产品进行锯切和铣削处理,锯切铣削完成后,六轴机器人2回到原位,铣削工装松开产品拿走,检查产品锯铣的尺寸合格。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1