一种仿生四足机器人系统的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种仿生四足机器人系统。
背景技术:
2.随着全球逐渐进入机器人研发和应用热潮之中,我国的机器人产业也进入了高速发展的阶段。在装备制造方面,越来越多的机械臂已经凭借高负载、高精准的操作能力取代了工人的双手;在物流配送方面,智能仓储机器人和无人搬运车也不断提高着运输效率;同时在生活服务方面,家用机器人与服务机器人也正努力成为每一个家庭的标配。虽然机器人包罗万象,但是具有人类形态、像人一样运动和思考的“人形机器人”,依然是机器人学的终极目标,另外具有四足动物或昆虫的形态、像这些生物一样运动的“足型机器人”,也被认为有同等重要的意义。
3.为此,亟需提供一种仿生四足机器人系统。
技术实现要素:
4.本实用新型的目的是提供一种仿生四足机器人系统,基于精巧的机械足设计,可实现全方位移动,灵活性强。
5.为实现上述目的,本实用新型提供了如下方案:
6.一种仿生四足机器人系统,包括:本体和与所述本体相连的四个机械足,所述本体内部设有控制模块以及与所述控制模块分别电性连接的驱动模块、数据转发模块和急停模块,所述控制模块通过所述数据转发模块无线连接有操控设备,每个所述机械足包括设置在本体内部的齿轮轴和无刷电机以及设置在所述本体外部的菱形机构;
7.所述齿轮轴包括共轴设置的齿轮轴一和齿轮轴二,所述齿轮轴一包括外轴和与所述外轴固定连接的齿轮一,所述齿轮轴二包括内轴和与所述内轴固定连接的齿轮二,所述无刷电机包括均设有编码器的无刷电机一和无刷电机二,所述无刷电机一和无刷电机二分别与所述驱动模块电性连接,所述无刷电机一的输出轴通过同步带一带动所述齿轮一转动,所述无刷电机二的输出轴通过同步带二带动所述齿轮二转动;
8.所述菱形机构包括连杆a、连杆b、连杆c、连杆d,所述连杆a和所述连杆b等长,所述连杆c长于所述连杆d,所述连杆a一端与所述连杆c一端铰接,所述连杆b一端与所述连杆d一端铰接,所述连杆c中部与所述连杆d另一端铰接,所述连杆b另一端与所述外轴固定连接,所述连杆a另一端与所述内轴固定连接。
9.可选的,所述操控设备采用pc客户端、遥控器中的一种或两种。
10.可选的,所述本体采用碳纤维材料。
11.可选的,所述齿轮一与所述外轴螺栓连接,所述齿轮二与所述内轴销轴连接。
12.可选的,所述驱动模块包括四个odrive驱动板,四个所述odrive驱动板均为基于stm32的高性能foc伺服驱动器,每个所述基于stm32的高性能foc伺服驱动器分别与一个所述无刷电机一和一个所述无刷电机二一一对应连接。
13.可选的,所述控制模块采用teensy控制板,所述teensy控制板为一个完整的基于usb的微控制器开发系统。
14.根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:本实用新型提供的仿生四足机器人系统,通过操控设备向机器人发出控制指令,该机器人具有四条结构相同的机械足,均为五连杆机构,采用并联结构,包括上连杆和下连杆两部分,每条机械足的两个上连杆在无刷电机的同轴驱动下,带动两个下连杆运动,四条机械足相互配合,实现机器人的全方位移动,灵活性强。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
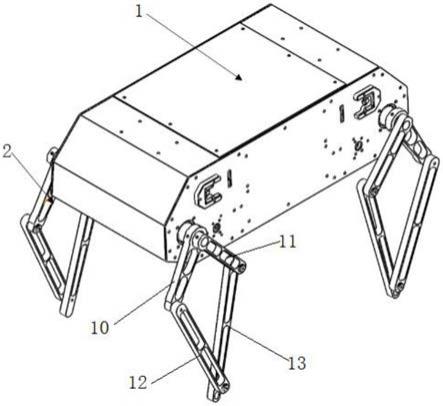
16.图1为本实用新型实施例仿生四足机器人系统的结构示意图;
17.图2为本实用新型实施例机械足的结构示意图一;
18.图3为本实用新型实施例机械足的结构示意图二;
19.图4为本实用新型实施例齿轮轴的结构示意图;
20.图5为本实用新型实施例数据转发模块的电路接线图;
21.图6为本实用新型实施例急停模块的电路接线图;
22.图7为本实用新型实施例仿生四足机器人系统的原理图。
23.附图标记说明:1、本体;2、机械足;3、编码器;4、无刷电机一;5、无刷电机二;6、同步带一;7、齿轮一;8、同步带二;9、齿轮二;10、连杆a;11、连杆b;12、连杆c;13、连杆d;14、外轴;15、内轴。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.本实用新型的目的是提供一种仿生四足机器人系统,基于精巧的机械足设计,可实现全方位移动,灵活性强。
26.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
27.如图1至图4所示,本实用新型实施例提供的仿生四足机器人系统,包括:本体1和与所述本体1相连的四个机械足2,各个机械足2的构造相同,所述本体1内部设有控制模块以及与所述控制模块分别电性连接的驱动模块、数据转发模块和急停模块,所述控制模块通过所述数据转发模块无线连接有操控设备,每个所述机械足2包括设置在本体1内部的齿轮轴和无刷电机以及设置在所述本体1外部的菱形机构;
28.所述齿轮轴包括共轴设置的齿轮轴一和齿轮轴二,所述齿轮轴一包括外轴14和与
所述外轴14固定连接的齿轮一7,所述齿轮轴二包括内轴15和与所述内轴15固定连接的齿轮二9,所述无刷电机包括均设有编码器3的无刷电机一4和无刷电机二5,所述无刷电机一4和无刷电机二5分别与所述驱动模块电性连接,所述无刷电机一4的输出轴通过同步带一6带动所述齿轮一7转动,所述无刷电机二5的输出轴通过同步带二8带动所述齿轮二9转动;
29.所述菱形机构包括连杆a10、连杆b11、连杆c12、连杆d13,所述连杆a10和所述连杆b11等长,所述连杆c12长于所述连杆d13,所述连杆a10一端与所述连杆c12一端铰接,所述连杆b11一端与所述连杆d13一端铰接,所述连杆c12中部与所述连杆d13另一端铰接,所述连杆b11另一端与所述外轴14固定连接,所述连杆a10另一端与所述内轴15固定连接。
30.所述操控设备采用pc客户端、遥控器中的一种或两种。
31.所述本体1采用碳纤维材料,整体外观为长方形。
32.所述齿轮一7与所述外轴14螺栓连接,所述齿轮二9与所述内轴15销轴连接。
33.所述驱动模块包括四个odrive驱动板,四个所述odrive驱动板均为基于stm32的高性能foc伺服驱动器,每个所述基于stm32的高性能foc伺服驱动器分别与一个所述无刷电机一4和一个所述无刷电机二5一一对应连接;一个odrive驱动板可以同时驱动两个无刷电机,正好满足每条机械足需要2个无刷电机控制的需求,同时odrive电路板上预留了usb调试接口,can通讯接口并支持abi和spi等多种编码器输入格式,板载mos管能支持25a以上的持续电流输出,外部供电支持24~48v满足大扭力电机供电需求并且有制动电阻接口来提高对系统在冲击载荷下的保护能力。
34.所述控制模块采用teensy控制板,所述teensy控制板为一个完整的基于usb的微控制器开发系统,体积小,能够实现多种类型的项目,所有编程都通过usb端口完成,是一个开源项目;此外,teensy控制板还兼容mac os x,linux和windows等系统、单个按键编程、易于使用的teensy loader应用程序、免费软件开发工具等特点,控制模块通过编码器获取四条机械足的转动信息,结合接收到的运动控制指令,计算得到机器人的目标位置,发送给驱动模块。
35.所述数据转发模块为基于stm32处理器设计的电路模块,具体的芯片型号为stm32f103c8t6,用于接收客户端或者遥控器发送的指令信息,并转发teensy控制板上传的运行数据(主要包括机器人的运动状态、系统电量等数据)给上位机,其电路接线图如图5所示;所述急停模块为基于stm8处理器设计的电路模块,具体的芯片型号为stm8s001j3m3tr,获取客户端或遥控器的急停信号,配合相应的继电器控制电源的开断,进而实现机器人的急停,其电路接线图如图6所示。
36.客户端(上位机)为专门为该四足机器人设计的pc端软件,客户端通过wifi连接机器人,可以通过控制盘区域控制四足机器人前后左右运动,同时显示区域可以实时显示机器人的运动状态、电压等参数信息,拨码开关可以切换机器人的使用模式。
37.遥控器型号为fs-i6,该款遥控器能够提供较好的通信距离,抗干扰性强且耗电量低,同时每台发射机都有一个唯一的id码,可以避免多台机器人运行时相互干扰的问题。
38.仿生四足机器人支持遥控方式、上位机间接方式和上位机直接方式三种控制方式,具体操作方法为:
39.(1)仿生四足机器人未上电时,将拨码开关拨至off档位;上电后,即为遥控控制方式,使用遥控器控制四足机器人前后左右的运动及急停,同时上位机可实时显示机器人的
运动状态、电压等参数信息;
40.(2)仿生四足机器人未上电时,将拨码开关拨至on档位;上电后,即为客户端直接控制模式。
41.(3)仿生四足机器人未上电时,将拨码开关拨至off档位;上电后,在客户端点击“切换”按钮,即可切换到客户端间接控制模式;该模式下,客户端发送运动控制信息给数据转发模块,数据转发模块转发给控制模块,控制模块将个无刷电机要执行的动作发送给驱动模块,进而控制机器人的运动,同时数据转发模块会将机器人的运动状态发送给数据转发模块,上传并显示在客户端界面。
42.本装置的工作原理是:如图7所示,pc端客户端或遥控器经数据转发模块向控制模块发出控制指令,控制模块利用驱动模块驱动无刷电机动作,无刷电机驱动机械足动作。具体的,对于同一条机械足的两个无刷电机同时向相反方向转动,带动与其连接的上下杆,在一个自由度方向运动,实现机器人前后的运动过程,无刷电机一转动时带动同步带一转动,与同步带一连接的齿轮一与外轴固定连接,进而带动外轴转动,实现与外轴连接的连杆b运动,连杆b进一步带动连杆d运动;无刷电机二转动时带动同步带二转动,与同步带二连接的齿轮二与内轴固定连接,进而带动内轴转动,实现与内轴连接的连杆a,连杆a进一步带动连杆c运动。
43.本实用新型提供的仿生四足机器人系统,通过操控设备向机器人发出控制指令,该机器人具有四条结构相同的机械足,均为五连杆机构,采用并联结构,包括上连杆和下连杆两部分,每条机械足的两个上连杆在无刷电机的同轴驱动下,带动两个下连杆运动,四条机械足相互配合,实现机器人的全方位移动,灵活性强。
44.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1