一种多扑旋翼无人机的制作方法
1.本发明涉及无人机领域,具体的说是一种多扑旋翼无人机。
背景技术:
2.无人机就是是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,现在无人机应用测绘、影视拍摄、地形勘测等行业,应用广泛给用作带来了一定的便利。
3.通过无人机对地形勘测过程中,由于山区地形复杂,底面碎石、树枝等杂物偏多,导致底面不平整,对无人机的着陆带来困难,会影响无人机的正常着陆,着陆过程中会出现无人机的倾斜甚至翻滚现象,对无人机造成损坏,无人机的旋翼是无人机的重要组成元件,在无人机因复杂地形出现倾斜时会发生折断现象,使得无人机无法正常使用。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种多扑旋翼无人机,该无人机能够在各种复杂的底面进行着陆,同时能够使得该无人机着陆过程稳定,避免了无人机在着陆过程中出现翻倒现象,当无人机在出现倾斜严重或者出现翻倒现象时,该无人机可以对核心部件旋翼进行及时的保护,避免旋翼折断,减少损失,有利于无人机的安全使用。
5.本发明解决其技术问题所采用的技术方案是:一种多扑旋翼无人机,包括上核心板、支臂、下核心板、缓冲机构、摄像装置和应急机构,所述支臂内端顶部与上核心板固定连接,支臂内端底部与下核心板固定连接,多个支臂对称设置,支臂外端顶部固定连接有动力电机,动力电机的输出端固定连接旋翼,摄像装置固定连接在下核心板下表面中部,缓冲机构连接于下核心板下表面,应急机构连接于支臂下表面;
6.所述缓冲机构包括缓冲臂、触发杆、连接块、第一缓冲弹簧、气缸、第二缓冲弹簧、压力杆、连接球和支撑板,连接块固定连接在下核心板下表面端部,多个连接块成中心对称设置,连接块中部设有与缓冲臂相适配的连接转槽,缓冲臂内端置于连接转槽内,且连接块与缓冲臂转动连接,第一缓冲弹簧的一端固定连接在连接块的底部,第一缓冲弹簧的另一端与缓冲臂固定连接,缓冲臂的外端下表面固定连接有气缸,压力杆的上端置于气缸内,且与气缸滑动连接,压力杆外壁套设有第二缓冲弹簧,第二缓冲弹簧上端固定连接在气缸底部,第二缓冲弹簧下端固定连接第一连接座上端,连接球和支撑板置于第一连接座下端。
7.具体的,所述第一连接座底部中部与连接球外壁接触,第一连接座底部两侧固定连接有第一弧形滑块,连接球侧设有与第一弧形滑块相适配的弧形滑槽,第一弧形滑块连接于弧形滑槽内,且第一弧形滑块与弧形滑槽滑动连接,连接球与第二连接座顶部接触,第二连接座上表面固定连接有第二弧形滑块,第二弧形滑块置于弧形滑槽内,且第二弧形滑块与弧形滑槽滑动连接,第二连接座底部固定连接支撑板。
8.具体的,所述缓冲臂中部上表面固定连接有触发杆,下核心板底部设有平衡气室,平衡气室套设在摄像装置底部外壁,且平衡气室与下核心板固定连接,平衡气室侧壁周围设置有连接气管,连接气管的一端与平衡气室贯通连接,连接气管的另一端穿过分别连接
块侧壁和缓冲臂的内部与气缸的顶部贯通设置。
9.具体的,所述应急机构包括固定板、推动弹簧、推动块、防护杆、导向锥、连接柱,固定板固定连接在支臂下端面靠近内端一侧,固定板远离支臂内端一侧中部固定连接有连接柱,支臂外端底部固定连接有收杆块,收杆块中部设有孔,推动块外端穿过收杆块中部的孔,且推动块外端固定连接有导向锥,卡板转动连接在固定板两侧壁之间,卡板内端上表面设有伸缩杆,伸缩杆的伸缩端与卡板侧壁抵紧设置,伸缩杆的上端固定连接在支臂的下表面,卡板内端可与触发杆上端接触,卡板外端固定连接有第一斜形卡块,推动块下端固定连接有与第二斜形卡块,第一斜形卡块与第二斜形卡块配合设置,连接柱外壁套设有推动块,推动块与连接柱滑动连接,推动块与固定板之间设有推动弹簧,推动块远离固定板一侧连接有防护杆,推动块外壁周围设有转动槽,防护杆末端置于转动槽内,且防护杆通过转动槽与推动块转动连接。
10.具体的,所述连接柱侧壁设有连接滑槽,推动块底部设有与连接滑槽相适配的连接滑块,连接滑块至于连接滑槽内,连接滑块远离固定板一侧固定连接有液压缸,液压缸远离连接滑块一端设有主动杆,主动杆一端置于液压缸内,且主动杆与液压缸滑动连接,液压缸上端设有从动杆,从动杆下端置于液压缸内,且从动杆与液压缸滑动连接,从动杆的上端与防护杆接触。
11.本发明的有益效果:
12.(1)本发明所述的一种多扑旋翼无人机,在该无人机着陆过程同时第一个先与地面接触的支撑板挤压连接球,压连接球挤压第一连接座,第一连接座同时对压力杆进行挤压,压力杆上端进入气缸内,第二缓冲弹簧被压缩,气缸内的气体被挤并通过连接气管进入平衡气室,气体通过平衡气室进入另外的气缸内,并推出压力杆,促使未接触地面的支撑板加快与地面接触,同时使得各个气缸内部的气压平衡,进一步的促进该无人机着陆稳定,避免了无人机在着陆过程中出现翻倒现象,当在着陆过程中,该无人机出现很大倾斜和翻转现象,对该无人机起到很好保护作用。
13.(2)本发明所述的一种多扑旋翼无人机,该无人机着陆时,支撑板先与地面接触,当地面倾斜时,支撑板会随着地面倾斜角度转动,最终与地面接触,支撑板转动时,带动第二连接座同步运动,第二连接座转动时,带动第二弧形滑块沿弧形滑槽方向转动,在支撑板转动贴合地面的过程中带动连接球转动,使得第一弧形滑块沿弧形滑槽方向转动,确保支撑板与地面保持水平,能够在各种复杂的底面进行着陆,同时能够使得该无人机着陆过程稳定,进一步的避免了无人机在着陆过程中出现翻倒现象。
14.(3)本发明所述的一种多扑旋翼无人机,连接滑块推动液压缸沿连接滑槽方向滑动,当防护杆运动到导向锥后,多个防护杆外端将互相远离,当主动杆与连接滑槽外端壁接触后,主动杆将被推进液压缸内,液压缸内的液体推动从动杆伸出,从动杆将防护杆顶起,进一步使得多个防护杆外端互相远离,在该无人机出现倾斜时,防护杆先与地面或阻挡物接触,避免了旋翼与地面或阻挡物接触,可以对核心部件旋翼进行及时的保护,避免旋翼折断,减少损失,有利于无人机的安全使用。
附图说明
15.下面结合附图和实施例对本发明进一步说明。
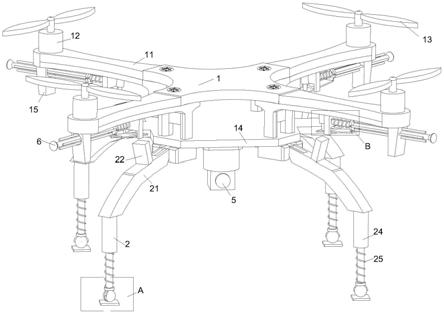
16.图1为本发明提供的一种多扑旋翼无人机的整体结构示意图;
17.图2为本发明提供的图1的轴视图;
18.图3为本发明提供的图1中a处放大立体图;
19.图4为本发明提供的应急机构立体图;
20.图5为本发明提供的图4中m-m方向剖视图;
21.图6为本发明提供的图1中b处放大图;
22.图中:1、上核心板;11、支臂;12、动力电机;13、旋翼;14、下核心板;15、收杆块;2、缓冲机构;21、缓冲臂;22、触发杆;23、连接块;231、第一缓冲弹簧;24、气缸;25、第二缓冲弹簧;26、压力杆;261、第一连接座;262、第一弧形滑块;27、连接球;271、弧形滑槽;28、第二连接座;281、第二弧形滑块;29、支撑板;3、连接气管;4、平衡气室;5、摄像装置;6、应急机构;61、固定板;62、推动弹簧;63、推动块;631、第二斜形卡块;64、防护杆;65、导向锥;66、连接柱;661、连接滑槽;67、液压缸;671、主动杆;672、从动杆;68、卡板;681、第一斜形卡块;69、伸缩杆。
具体实施方式
23.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
24.如图1-图6所示,本发明所述的一种多扑旋翼无人机,包括上核心板1、支臂11、下核心板14、缓冲机构2、摄像装置5和应急机构6,所述支臂11内端顶部与上核心板1固定连接,支臂11内端底部与下核心板14固定连接,多个支臂11对称设置,支臂11外端顶部固定连接有动力电机12,动力电机12的输出端固定连接旋翼13,摄像装置5固定连接在下核心板14下表面中部,缓冲机构2连接于下核心板14下表面,应急机构6连接于支臂11下表面;
25.所述缓冲机构2包括缓冲臂21、触发杆22、连接块23、第一缓冲弹簧231、气缸24、第二缓冲弹簧25、压力杆26、连接球27和支撑板29,连接块23固定连接在下核心板14下表面端部,多个连接块23成中心对称设置,连接块23中部设有与缓冲臂21相适配的连接转槽,缓冲臂21内端置于连接转槽内,且连接块23与缓冲臂21转动连接,第一缓冲弹簧231的一端固定连接在连接块23的底部,第一缓冲弹簧231的另一端与缓冲臂21固定连接,缓冲臂21的外端下表面固定连接有气缸24,压力杆26的上端置于气缸24内,且与气缸24滑动连接,压力杆26外壁套设有第二缓冲弹簧25,第二缓冲弹簧25上端固定连接在气缸24底部,第二缓冲弹簧25下端固定连接第一连接座261上端,连接球27和支撑板29置于第一连接座261下端,通过设置上核心板1和下核心板14对该无人机的摄像装置5等组件起到支撑安装作用,下核心板14,通过设置支臂11对动力电机12起到安装作用,动力电机12为旋翼13提供动力,通过设置缓冲机构2使得该无人机着陆稳定且适应各种复杂地面,通过设置应急机构6在该无人机出现翻转倾斜情况时,对该无人机组件起到保护作用,在该无人机着陆过程同时第一个先与地面接触的支撑板29挤压连接球27,压连接球27挤压第一连接座261,第一连接座261同时对压力杆26进行挤压,压力杆26上端进入气缸24内,第二缓冲弹簧25被压缩,气缸24内的气体被挤并通过连接气管3进入平衡气室4,气体通过平衡气室4进入另外的气缸24内,并推出压力杆26,促使未接触地面的支撑板29加快与地面接触,同时使得各个气缸24内部的气压平衡,进一步的促进该无人机着陆稳定,当在着陆过程中,该无人机出现很大倾斜和翻转现
象,进一步避免了无人机在着陆过程中出现翻倒现象。
26.具体的,所述第一连接座261底部中部与连接球27外壁接触,第一连接座261底部两侧固定连接有第一弧形滑块262,连接球27侧设有与第一弧形滑块262相适配的弧形滑槽271,第一弧形滑块262连接于弧形滑槽271内,且第一弧形滑块262与弧形滑槽271滑动连接,连接球27与第二连接座28顶部接触,第二连接座28上表面固定连接有第二弧形滑块281,第二弧形滑块281置于弧形滑槽271内,且第二弧形滑块281与弧形滑槽271滑动连接,第二连接座28底部固定连接支撑板29,该无人机着陆时,支撑板29先与地面接触,当地面倾斜时,支撑板29会随着地面倾斜角度转动,最终与地面接触,支撑板29转动时,带动第二连接座28同步运动,第二连接座28转动时,带动第二弧形滑块281沿弧形滑槽271方向转动,在支撑板29转动贴合地面的过程中带动连接球27转动,使得第一弧形滑块262沿弧形滑槽271方向转动,确保支撑板29与地面保持水平,能够在各种复杂的底面进行着陆,同时能够使得该无人机着陆过程稳定,进一步避免了无人机在着陆过程中出现翻倒现象。
27.具体的,所述缓冲臂21中部上表面固定连接有触发杆22,下核心板14底部设有平衡气室4,平衡气室4套设在摄像装置5底部外壁,且平衡气室4与下核心板14固定连接,平衡气室4侧壁周围设置有连接气管3,连接气管3的一端与平衡气室4贯通连接,连接气管3的另一端穿过分别连接块23侧壁和缓冲臂21的内部与气缸24的顶部贯通设置,通过设置平衡气室4和连接气管3实现各个气缸24内的气体流动,使得各个气缸24内的气压均衡,通过平衡各个气缸24内的气压,使得该无人机着陆过程稳定,当压力杆26上端进入气缸24内,第二缓冲弹簧25被压缩,气缸24内的气体被挤并通过连接气管3进入平衡气室4,气体通过平衡气室4进入另外的气缸24内,并推出压力杆26,促使未接触地面的支撑板29加快与地面接触,同时使得各个气缸24内部的气压平衡,进一步的促进该无人机着陆稳定,避免了无人机在着陆过程中出现翻倒现象。
28.具体的,所述应急机构6包括固定板61、推动弹簧62、推动块63、防护杆64、导向锥65、连接柱66,固定板61固定连接在支臂11下端面靠近上核心板1的一侧,固定板61远离支臂11内端一侧中部固定连接有连接柱66,支臂11外端底部固定连接有收杆块15,收杆块15中部设有孔,推动块63外端穿过收杆块15中部的孔,且推动块63外端固定连接有导向锥65,卡板68转动连接在固定板61两侧壁之间,卡板68内端上表面设有伸缩杆69,伸缩杆69的伸缩端与卡板68侧壁抵紧设置,伸缩杆69的上端固定连接在支臂11的下表面,卡板68内端可与触发杆22上端接触,卡板68外端固定连接有第一斜形卡块681,推动块63下端固定连接有与第二斜形卡块631,第一斜形卡块681与第二斜形卡块631配合设置,连接柱66外壁套设有推动块63,推动块63与连接柱66滑动连接,推动块63与固定板61之间设有推动弹簧62,推动块63远离固定板61一侧连接有防护杆64,推动块63外壁周围设有转动槽,防护杆64末端置于转动槽内,且防护杆64通过转动槽与推动块63转动连接,当其中一个支撑板29受力过大时,压力杆26在压缩气缸24内的气体同时带动压缩气缸24向上运动,压缩气缸24向上运动同时带动缓冲臂21外端向上运动,以此同时,第一缓冲弹簧231被拉伸,触发杆22向上运动抵触到卡板68的内端,卡板68内端向上运动,卡板68的外端向下运动,此时伸缩杆69被压缩,卡板68的外端向下运动过程中第一斜形卡块681与第二斜形卡块631脱离,推动弹簧62推动推动块63向远离固定板61方向运动,推动块63推动防护杆64向同步运动,在该无人机出现倾斜时,防护杆64先与地面或阻挡物接触,避免了旋翼13与地面或阻挡物接触,可以对
核心部件旋翼13进行及时的保护,避免旋翼13折断,减少损失,有利于无人机的安全使用。
29.具体的,所述连接柱66侧壁设有连接滑槽661,推动块63底部设有与连接滑槽661相适配的连接滑块,连接滑块至于连接滑槽661内,连接滑块远离固定板61一侧固定连接有液压缸67,液压缸67远离连接滑块一端设有主动杆671,主动杆671一端置于液压缸67内,且主动杆671与液压缸67滑动连接,液压缸67上端设有从动杆672,从动杆672下端置于液压缸67内,且从动杆672与液压缸67滑动连接,从动杆672的上端与防护杆64接触,连接滑块推动液压缸67沿连接滑槽661方向滑动,当防护杆64运动到导向锥65后,多个防护杆64外端将互相远离,当主动杆671与连接滑槽661外端壁接触后,主动杆671将被推进液压缸67内,液压缸67内的液体推动从动杆672伸出,从动杆672将防护杆64顶起,进一步使得多个防护杆64外端互相远离,在该无人机出现倾斜时,防护杆64先与地面或阻挡物接触,避免了旋翼13与地面或阻挡物接触,可以对核心部件旋翼13进行及时的保护,避免旋翼13折断,减少损失,有利于无人机的安全使用。
30.工作原理:当该无人机着陆时,支撑板29先与地面接触,当地面倾斜时,支撑板29会随着地面倾斜角度转动,最终与地面接触,支撑板29转动时,带动第二连接座28同步运动,第二连接座28转动时,带动第二弧形滑块281沿弧形滑槽271方向转动,在支撑板29转动贴合地面的过程中带动连接球27转动,使得第一弧形滑块262沿弧形滑槽271方向转动,确保支撑板29与地面保持水平,能够在各种复杂的底面进行着陆,同时能够使得该无人机着陆过程稳定,避免了无人机在着陆过程中出现翻倒现象,在该无人机着陆过程同时第一个先与地面接触的支撑板29挤压第二连接座28,第二连接座28将同时挤压连接球27,压连接球27挤压第一连接座261,第一连接座261同时对压力杆26进行挤压,压力杆26上端进入气缸24内,第二缓冲弹簧25被压缩,气缸24内的气体被挤并通过连接气管3进入平衡气室4,气体通过平衡气室4进入另外的气缸24内,并推出压力杆26,促使未接触地面的支撑板29加快与地面接触,同时使得各个气缸24内部的气压平衡,进一步的促进该无人机着陆稳定,进一步避免了无人机在着陆过程中出现翻倒现象,当在着陆过程中,该无人机出现很大倾斜和翻转现象之前,其中一个支撑板29受力过大时,压力杆26在压缩气缸24内的气体同时带动压缩气缸24向上运动,压缩气缸24向上运动同时带动缓冲臂21外端向上运动,以此同时,第一缓冲弹簧231被拉伸,触发杆22向上运动抵触到卡板68的内端,卡板68内端向上运动,卡板68的外端向下运动,此时伸缩杆69被压缩,卡板68的外端向下运动过程中第一斜形卡块681与第二斜形卡块631脱离,推动弹簧62推动推动块63向远离固定板61方向运动,推动块63推动防护杆64向同步运动,于此同时连接滑块推动液压缸67沿连接滑槽661方向滑动,当防护杆64运动到导向锥65后,多个防护杆64外端将互相远离,当主动杆671与连接滑槽661外端壁接触后,主动杆671将被推进液压缸67内,液压缸67内的液体推动从动杆672伸出,从动杆672将防护杆64顶起,进一步使得多个防护杆64外端互相远离,在该无人机出现倾斜时,防护杆64先与地面或阻挡物接触,避免了旋翼13与地面或阻挡物接触,可以对核心部件旋翼13进行及时的保护,避免旋翼13折断,减少损失,有利于无人机的安全使用。
31.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效
物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1