垂直起降飞机的制作方法
1.本发明涉及一种垂直起降(vtol,vertical take-off and landing)飞机,特别是具有电动推进或提升单元的飞机,即所谓的电动垂直起降飞机。
背景技术:
2.一些类似的飞机设计已被公开,例如在usd311720s、us3834654a和us9499266b1中。
3.通常,当代的电动垂直起降飞机设计的空气动力学效率较差,因为它们结合了多个系统来垂直提升飞机和水平移动飞机。特别是,没有一种已知的设计可以被认为是自然稳定的飞机。已知设计的示例包括季航空/科拉(zee aero/cora)公司的飞机,参见us2018/105268a1;巴西航空工业(embraerx)公司的飞机;奥罗拉飞行科学(aurora flight science)公司(现在是波音(boeing)公司的一部分)的飞机;城市空中巴士&零点项目(city airbus&project zero)公司的飞机;峰飞航空(autoflightx)公司的飞机,参见us10081436b1。
4.pipistrel nuuva v300是一种无人驾驶货运飞机,其主要重量位于中央,这意味着翼面分布基本上关于y-z平面对称。它具有串联翼和八个升力螺旋桨。缺点是着陆载荷(类似于波音/奥罗拉pav)通过发动机短舱传递,这是不利的。
5.没有一种已知的设计能够使乘客舒适地进入机身。所有已知的设计都会导致对进入飞机的乘客不利的解决方案。这主要是由于推进和提升系统的垂直位置较低。
6.大多数已知的设计在悬停/低速状态(参见uber elevate crm003机型)期间,升力螺旋桨气流内的飞机部件具有高空气动力学阻塞(或安装损失),这导致悬停和过渡飞行期间的高功率损失。
7.大多数已知的设计都有在彼此之后的升力螺旋桨。数量越多,后置螺旋桨的空气动力损失就越高,这会导致(不必要的)高功率消耗,从而增加飞机的整体重量或缩短航程。
8.大多数已知的设计在尺寸上是不可扩展的且跨度已经大于10m,有效载荷量相对较低。因此,扩大到更高的有效载荷和/或载客量将导致更大的飞机尺寸。然而,着陆点的尺寸是有限的,尤其是在城市地区,并且随着尺寸的增大,重量会超比例地增加。
9.大多数已知的配置具有许多小直径升力螺旋桨,因此具有较高的桨盘载荷(disk load),这导致噪音水平增加。
10.已知的设计缺乏导致高重量损失或具有低有效载荷空重比的飞机的结构集成飞机架构。
11.已知的设计缺乏一种在结构上集成的飞机架构,这导致高重量损失或飞机具有低有效载荷空重比。
12.在先前的申请(ep 3 757 004 a1)中,申请人提出了一种垂直起降飞机设计,该设计克服了大多数(即使不是全部)上述缺点。
13.然而,为了提供可靠的日常垂直起降飞机,额外还需要一种改进的混合型或过渡
型飞机(即多旋翼机+有翼机),以为了:
[0014]-提高空气动力学效率和/或最小化阻力,特别是在使用多旋翼串联机翼时,在升阻比方面具有空气动力学效率;
[0015]-作为飞机在空气动力学上自然稳定,因此产生整体飞机动量以将飞机稳定在其纵轴上。这对于更轻松地满足认证要求和提高飞机的整体飞行效率至关重要;
[0016]-考虑到在每种情况下,旋转提升单元(螺旋桨)和静态提升单元(机翼)的作用力和动量变化很大,并可能导致不利的空气动力学特性,创建一种在多旋翼和飞行模式下同样适用的飞机机翼配置;
[0017]-应对至少一个发动机或螺旋桨故障,这意味着考虑特定的重心位置与驱动中心的位置。
技术实现要素:
[0018]
本发明的目的是提出一种新颖的垂直起降飞机设计,该设计提供了对ep 3 757 004 a1中描述的设计的进一步改进,从而实现了一种垂直起降飞机,该垂直起降飞机在多旋翼和飞行模式中具有增加的自然稳定性、增加的空气动力学效率以及同样良好的空气动力学特性,可以应对至少一个发动机或螺旋桨故障(一个发动机不工作-oei)的情况。
[0019]
该目的通过垂直起降飞机来实现,并定义了这种飞机的有利的进一步发展。
[0020]
根据本发明,垂直起降飞机包括:机身,用于运输乘客和/或负载;前机翼,附接于所述机身;后机翼,附接于所述机身,在向前飞行方向上所述后机翼在所述前机翼的后方;右连接梁和左连接梁,所述连接梁在结构上与所述前机翼和所述后机翼连接,所述连接梁与机身间隔开;以及在每个所述连接梁上的至少两个提升单元,每个所述提升单元包括至少一个螺旋桨和至少一个驱动所述螺旋桨的马达,优选为电动马达,并且所述提升单元被布置为其各自的螺旋桨轴线处于基本上竖直的方向;其中,至少部分所述前机翼具有掠角γ,45
°
≤γ≤135
°
,优选地γ=75
°
,至少部分所述后机翼具有掠角β≥30
°
的前掠(即β《90
°
),优选地β=65
°
。
[0021]“掠翼”是指从其根部向后或向前倾斜而不是直的向侧面(90
°
)方向的机翼。术语“掠翼”通常用于表示“后掠”,但变体包括前掠、可变掠和一侧前掠、另一侧后掠的斜翼。在本文中,掠角小于90
°
表示前掠,即机翼在(向前)飞行方向上向前倾斜。
[0022]
在本发明的上下文中,前机翼的掠角γ可以为45
°
≤γ≤135
°
。优选地γ=75
°
。后机翼的(前)掠角β可以为30
°
≤β≤90
°
。优选地β=65
°
。
[0023]
为了更好地可及性,在飞机的侧视图中,连接梁优选被放置为高于机身或在机身之上。
[0024]
更一般地,本发明可以包括将以下物理上可定义的点(其为航空领域的技术人员所熟知的)放置在特定位置,以便创建具有良好的空气动力学特性同时具有高性能多旋翼飞机特性的转换飞机,特别是在一个发动机不工作(oei)的情况下。
[0025]
上述的点的定义如下,下面将使用该术语:
[0026]
·
驱动中心(coa)是由提升旋翼的位置和姿态定义的参考点。coa通常等于所有提升旋翼的几何中心,但在数学上是所有升力和力矩处于平衡状态的点。
[0027]
·
重心(cog)是如果飞机处于平衡状态,所有重力作用的点。换句话说:在物理学
中,空间中质量分布的重心或质心(有时称为平衡点)是分布质量在加权相对位置总和为零的唯一的点。该点由飞机布局、几何形状和重量分布定义。
[0028]
·
中性点(np)是在数学上,任何提升表面(如机翼)作用于飞机的所有力矩为零的点。对完整的飞机(包括水平安定面)的纵向静态稳定性的数学分析得出稳定性为中性的重心位置。这个位置被称为中性点。(任何水平安定面的面积越大,水平安定面绕空气动力中心的力臂越大,中性点越靠后。)明确的np是纵向稳定飞机的关键,并且主要由静态提升单元(如机翼、稳定器)来定义。
[0029]
·
空气动力中心(ca)是升力体(如机翼)的所有俯仰力矩(cm)系数不随迎角变化的点(dcm/dα=0)。该点主要由静态提升单元(如机翼、稳定器)依据平面、位置、尺寸等方面来定义。更具体地说,作用在流过流体的机翼上的扭矩或力矩可以由施加在机翼上某点的净升力和净阻力以及围绕该点的单独的净俯仰力矩来说明,其大小随着选择的升力施加的位置而变化。ca是机翼的俯仰力矩系数不随升力系数(即迎角)变化的点,使分析更简单。
[0030]
本发明提出寻找一种技术解决方案,以便在悬停向飞行模式转换的飞行阶段期间,使重心、驱动中心和中性点彼此之间尽可能靠近,反之亦然。除了低阻力设计和结构一体化机身设计之外,飞机的布局最好以由cm/α定义的纵向稳定性为负(即cm/α《0)这样的方式来设计。
[0031]
当任何飞机移动时,它将受到作用在它身上的力和速度的微小变化。如果这种变化引起进一步的变化,该变化为倾向于使飞机恢复到其原始速度和方向而不需要人或机器的输入,则可以说飞机是静态稳定的。这种飞机具有正稳定性。另一方面,如果这种变化引起进一步的变化,该变化为倾向于使飞机偏离其原始速度和方向,则可以说飞机是静态不稳定的。这种飞机具有负稳定性。如本领域技术人员所知,飞机可以具有称为松弛稳定性的低负稳定性的形式,以提供超高的操纵性。
[0032]
本发明可以包括以这样的方式选择提升单元的坐标位置,即该位置在飞机的几何形状方面基本对称地布置,从而定义coa在几何上至少近似地与cog处于相同的x位置,同时np被设计为位于这两个点(coa、cog)的后面。
[0033]
通常,飞机的主要的轴线被定义为:
[0034]
·
纵向轴线,或滚轴——在正常飞行方向,或飞行员面对的方向,从机尾到机头穿过飞机的机身的轴线,类似于船舶的吃水线。
[0035]
·
横截轴线,或横向轴线,或俯仰轴线——在有人驾驶飞机中从飞行员的左侧到右侧延伸,且平行于有翼飞机的机翼,平行于纵剖面线。
[0036]
·
法向轴线,或垂直轴线——从上到下绘制的竖直轴线,并垂直于其他两条轴线。
[0037]
在下文中,这些轴线也分别由字母x、y和z表示。
[0038]
本发明还可以包括在前机翼和后机翼之间的飞机的机翼表面尺寸(或面积)的特定平衡,因为这限定了飞机的纵向稳定性。这些机翼的上述前掠将飞机的中性点(np)尽可能地推向尾部。
[0039]
在根据本发明的飞机的相应实施例中,飞机的驱动中心在几何上与飞机的重心处于相同的纵向位置,同时中性点位于驱动中心和重心的后面。
[0040]
总之,所述前机翼和所述前机翼具有必要的尺寸(面积),以便产生承载整个飞机重量所需的升力。
[0041]
然而,前机翼和后机翼的平面尺寸可能不相等,前机翼为40%,后机翼为60%,但产生的升力可以具有相反的比例,前机翼为60%,后机翼为40%。为了实现这一点,后机翼可以被分成两个单独的但结构上连接的部分,即飞机提升部分(机翼)和稳定单元(例如,以所谓的v形尾翼的形式),该稳定单元对飞机的提升的贡献不大,但提供了显著的水平表面,作为有助于横向稳定性的风向标。
[0042]
在根据本发明的飞机的相应实施例中,前机翼的翼面积s
前
小于后机翼的翼面积s
后
,优选为60%《s
前
/s
后
《100%,更优选地为60%《s
前
/s
后
《70%。
[0043]
在根据本发明的飞机的另一个实施例中,在垂直于飞机的纵向轴线(x)的平面中,后机翼从机身侧向延伸,使得各自的半翼形成的角度(θ)小于180
°
,优选为大约90
°
至100
°
。
[0044]
为了减少任何旋转提升单元(例如螺旋桨)的下洗效应,如果由提升单元产生的气流撞击固体材料(例如发动机支架)时就会产生这种效应,可以在旋翼平面之间放置机翼附件。该旋翼平面可以被定义为由旋转的螺旋桨扫过的各区域。这使在悬停或低速机动期间旋翼性能的提高。
[0045]
由于前机翼的存在,后机翼通常在空气动力学方面受到负面的影响,因为前机翼会引起冲击后机翼的气流。为了减少这种影响,在根据本发明的飞机的相应实施例中,后机翼可以在竖直位置上被放置得更高。但是,它仍然可以与连接梁连接。一般来说,这个特点可以使从主体(机身)到机翼以及从机翼到提升单元的刚性机身设计。
[0046]
由于前机翼和后机翼通过连接梁在结构上连接,可以显著减小出现在机翼中的任何扭转。这是有益的,因为负载是平衡和路由的。
[0047]
如上所述,飞机的提升单元可以关于飞机纵向(x)和横向(y)轴线基本对称放置。这样,多旋翼模式下的耦合被最小化,并且在oei模式期间的性能被提高,因为从每个提升单元到重心的各自的几何距离基本相等。
[0048]
在根据本发明的飞机的相应实施例中,提升单元因此分别关于飞机的纵向轴线和横向轴线对称地放置。
[0049]
如上所述,提升单元的位置定义多旋翼模式的驱动中心(coa),其可以根据纵向位置通过来定义,其中xi表示提升单元的纵向位置,并且,其中,在六旋翼飞机配置的情况下n=6。
[0050]
在根据本发明的飞机的相应实施例中,飞机在每个连接梁上包括三个提升单元。
[0051]
这也适用于四旋翼飞机(n=4)或八旋翼飞机(n=8)或任何其他同轴配置(相对于飞机的纵向轴线)。
[0052]
为了减少来自任何(旋转)提升单元的下洗效应,静态提升单元(即机翼)可以在位于每个旋转提升单元的旋转盘或旋翼平面之间的(纵向)位置(即由各自的螺旋桨扫过的区域)与结构或连接梁有效连接。
[0053]
在根据本发明的飞机的相应实施例中,分别连接于连接梁的前机翼和后机翼的附件被放置在由螺旋桨扫过的各自的旋翼平面之间,以使螺旋桨和所述附件之间在竖直方向上没有重叠。
[0054]
根据本发明的飞机具有前机翼和后机翼,它们一起限定了飞机的中性点(np)。如本领域技术人员所知,np主要由飞机机翼各自的空气动力中心(ca)的组合来定义。每个空
气动力中心(前机翼为ca
前
,后机翼为ca
后
)之间的距离乘以各自到飞机重心(cog)的纵向距离x,定义出纵向动量。在本发明的上下文中,由于前机翼和后机翼的存在,必须考虑和平衡两个空气动力中心。如上所述,cm/α可以被选择为负值,从而得到稳定的飞机。
[0055]
更具体地说,纵向静态稳定性是通过以俯仰偏差引起抵消俯仰力矩的方式来分配飞机的水平表面面积来实现的。位于重心后的所有水平表面面积通过风向标效应对纵向静态稳定性有积极贡献。位于cog前的所有水平表面面积都不稳定。每个水平表面面积通过其各自的面积乘从其面积中心到cog的杠杆臂都有助于这一效应。飞机的中性点(np)被定义为所有俯仰力矩处于平衡状态的点。为了实现纵向静态稳定性,所述中性点需要位于cog后面。这种几何形状使得cm/α《0。
[0056]
因此,在飞机的另一个实施例中,由量cm/α定义的纵向飞机稳定性是负数,cm是俯仰力矩系数,α是迎角。
[0057]
传统的现有技术飞机机翼可以以基本上横向的角度(90
°
)与机身连接,从而形成直的机翼(无掠)。遵循这一原则将导致产生相对靠前的中性点,因此造成不稳定的纵向稳定性。为了使每个机翼的空气动力中心向后(朝向尾部)移动,前机翼包括小于90
°
的掠角γ,后机翼包括也小于90
°
的掠角β。如上所述,前机翼的翼面积s
前
小于后机翼的翼面积s
后
,但后机翼表面由于v形尾翼的存在,可能会产生较小的垂直升力。
[0058]
为了进一步减小机身的长度,同时保持足够的后表面翼面积s
后
,v形尾翼可以包括大于90
°
的掠角δ。这也使得载荷传递到机身主体得到改善。
[0059]
在根据本发明的飞机的相应实施例中,后机翼部分地形成为具有大于90
°
的掠角(δ)的v形尾翼的形式。
[0060]
此外,前机翼可以包含二面角(λ),该二面角与上述掠角(γ)组合,对飞机的横向/方向稳定性产生积极影响。
[0061]
在根据本发明的飞机的相应实施例中,前机翼包含二面角(λ),优选地,至少在前机翼各自的尖端处或朝向前机翼各自的尖端增加,优选地,0
°
《λ《5
°
。
[0062]
后机翼可以包含下反角(ε),以便在前机翼的较高下洗气流的区域中产生高的竖直偏移,这主要发生在前机翼的内侧部分(翼展方向)。
[0063]
在根据本发明的飞机的相应实施例中,后机翼因此包含下反角(ε),至少在后机翼的外侧部分,并且优选地朝向后机翼的外侧部分(即朝向所述连接梁)增加,优选地,0
°
<ε《5
°
,
[0064]
在航空学中,“二面角”是飞机左右机翼(或尾翼面)之间的角度。特别地,二面角是从机翼的水平面或(固定翼)飞机的水平尾翼向上的角度。“反角”是负二面角的名称,即反角是从机翼的水平面或(固定翼)飞机的水平尾翼向下的角度。
[0065]
在根据本发明的飞机的相应实施例中,所述飞机还包括至少一个向前推进单元,所述向前推进单元优选地(但不限于)具有至少一个螺旋桨和至少一个驱动所述螺旋桨的马达,优选为电动马达,更优选地,向前推进单元位于飞机的后部。这种前向推进单元有利于向前飞行。
[0066]
在根据本发明的飞机的优选实施例中,机身的每一侧有至少一个向前推进单元,优选地,向前推进单元位于前机翼和后机翼的下方,最优选地,向前推进单元位于后机翼的前方。事实证明,这对于达到高向前飞行速度非常有益。
[0067]
在根据本发明的飞机的又一有利实施例中,当沿着飞机的纵向轴线观察时,前机翼和后机翼共同构成闭环形状。这使得机械稳定性增加,并减少了负面的空气动力学影响。
附图说明
[0068]
本发明的进一步的特征和优点可以从下面参考附图对示例性实施例的描述中得出。
[0069]
图1示出了根据本发明的飞机的平面图;
[0070]
图2示出了根据本发明的飞机的侧视图;
[0071]
图3示出了根据本发明的飞行器的正视图;
[0072]
图4示出了图1的简化版本;
[0073]
图5示出了根据本发明的飞行器的另一正视图;以及
[0074]
图6示出了根据本发明的飞行器的另一平面图。
具体实施方式
[0075]
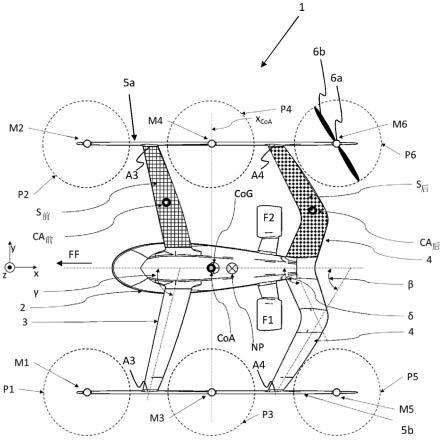
图1示出了一种具有用于运输乘客和/或负载的机身2或机身主体的垂直起降飞机1。x、y和z表示飞机轴线(分别为纵向、横向和竖向,如上所述)。前机翼3附接于机身2。此外,后机翼4附接于机身2,并且后机翼4在飞机1的向前飞行方向(箭头ff)上在前机翼3的后方。右连接梁5a和左连接梁5b在结构上与前机翼3和后机翼4连接,连接梁5a、5b与机身2横向间隔开。飞机1包括六个提升单元m1-m6,每个连接梁5a、5b上设置有三个提升单元。每个提升单元m1-m6包括至少一个螺旋桨6b和至少一个驱动该螺旋桨6b的马达6a,马达优选为电动马达,并且提升单元被布置为其各自的螺旋桨轴线处于基本上竖直的方向(z轴)。这在图1中仅明确显示了提升单元m1-m6中的一个(m6)。
[0076]
提升单元m1-m6关于飞机1的纵向(x)和横向(y)轴线对称地放置:当与提升单元m3相比时,提升单元m1和提升单元m5分别(在x方向上)朝前和朝后以相等的距离放置。提升单元m2、m4和m6也以同样的方式放置。此外,飞机1每侧的三个提升单元被放置为与飞机纵向轴线的横向距离(在y方向上)相等。
[0077]
附图标记p1-p6表示旋翼平面,该旋翼平面可以被定义为由提升单元m1-m6的旋转螺旋桨6b扫过的各自的区域。连接梁5a、5b的机翼附件被放置在旋翼平面p1-p6之间并位于旋翼平面p1-p6外部。该机翼附件对于前机翼3被表示为a3,对于后机翼4被表示为a4。
[0078]
前机翼3和后机翼4(至少它们的一部分,例如后机翼4相对于机身2的外侧部分)都限定了小于90
°
的掠角γ、β(前掠)。后机翼4在靠近机身2(v形尾翼)的区域具有后掠(角δ),这有助于减小机身2的长度,同时保持足够的后表面翼面积s
后
(参见下文)。这些角度的优选值为45
°
《γ《135
°
,30
°
《β《90
°
以及70
°
《δ《170
°
,优选地,γ=75
°
,优选地,β=65
°
,优选地,δ=110
°
。
[0079]
附图标记f1和f2表示向前推进单元(推进器),该向前推进单元分别附接在机身2的左侧和右侧,并且靠近飞机1的后部(在后机翼4的前面)。推进器可以包括至少一个螺旋桨和至少一个驱动该螺旋桨的马达(未示出)。
[0080]
之前定义的飞机1的具体物理点被表示为cog(重心)、coa(驱动中心)、ca(空气动力中心)和np(中性点)。还分别表示了前机翼3的空气动力中心(ca
前
)和后机翼4的空气动力
中心(ca
后
),表示在了每个机翼在机身2和右连接梁5a之间延伸的那部分上。这同样适用于每个机翼在机身2和左连接梁5b之间延伸的那部分(图1中未示出)。从图1中可以看出,飞机1的驱动中心coa在几何上与飞机的重心cog处于相同的纵向位置(x
coa
)(至少近似),由于前机翼3和后机翼4的前掠,中性点np很好地位于驱动中心coa和重心cog的后方。
[0081]
前机翼3的翼面积s
前
小于后机翼4的翼面积s
后
。在本示例中,60%《s
前
/s
后
《70%。总之,后机翼4包括v形尾翼(半翼4b)的翼面和传统的提升机翼(半翼4a)的翼面,这将从下面的图3至图5中变得明显。
[0082]
图2示出了图1的飞机1的侧视图。在所有附图中,相同的元件由相同的附图标记表示。
[0083]
连接梁(在图2中仅可见梁5b)在z方向上被放置得高于机身2或在机身2之上(参见图1)。
[0084]
m1+2表示提升单元m1和m2,它们在视线中一个位于另一个后面。这同样分别适用于提升单元m3和m4以及提升单元m5和m6。
[0085]
附图标记d表示螺旋桨下洗气流(仅显示了提升单元m1-m6中的一个(m5+6))。上述机翼附件(参见图1)位于下洗气流区之外。
[0086]
图3示出了飞机1的正视图。可以看出,在垂直于飞机1的纵向轴线(x)的平面中,后机翼4从机身2侧向延伸,使得后机翼4的各自的半翼4a、4b形成的角度θ小于180
°
,优选为大约90
°
至100
°
。内侧半翼4b形成v形尾翼翼面,同时外侧半翼4a代表传统的提升机翼翼面。
[0087]
前机翼3包含二面角(λ),该二面角与上述掠角(γ《90
°
)组合,对飞机1的横向/方向稳定性产生积极影响。该角λ可以朝向前机翼3的各自的尖端增加。此外,后机翼4包括下反角(ε),以便在前机翼3的较高下洗气流7(参见图2)的区域中产生高垂直偏移vo,这尤其发生在该前机翼3的内侧部分(翼展方向)。该角ε也可以朝向后机翼4的各自的尖端增加。这样,当沿着飞机1的纵向轴线(x)观察时,前机翼3和后机翼4共同构成闭环形状。
[0088]
图4是图1的稍微简化的版本,用于说明前机翼3的翼面积s
前
小于后机翼4的翼面积s
后
。然而,由于v形尾翼的配置,后机翼表面产生的垂直升力较小。后机翼4包括v形尾翼翼面(半翼4b)和传统的提升机翼翼面(半翼4a),它们通过不同的阴影来表示。
[0089]
这在图5中进一步示出,图5是飞机1的另一个正视图(更多细节参见图3)。
[0090]
最后,如图6所示,v形尾翼掠角δ,δ》90
°
,也促进了载荷传递(附图标记8表示的虚线)的改善,因为“v”形构造将载荷从连接梁5b通过翼4a和v形尾翼4b传递到机身2中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1