一种旋转式限位自锁式翻转装置的制作方法
1.本发明涉及一种调整装置,具体为一种旋转式限位自锁式翻转装置。
背景技术:
2.目前市场上一般摇架翻装置构大多用在卷绕抬升机构中,尤其是纱线络筒、合股的卷绕机构中使用较多,如图1-2所示,一种旋转式弹簧阻尼限位翻转装置,包括:翻转型材、卷绕机构、纱卷、抬升手柄、摇臂、翻转轴承支座、翻转轴、弹簧阻尼限位装置,所述翻转轴承支座设置在翻转型材两端,并通过翻转轴将翻转型材安装在翻转轴承支座,使翻转型材能围绕与翻转轴承支座安装位置转动,纱卷通过摇臂固定在翻转型材上,纱卷与摇臂之间设有轴承,所述卷绕机构安装在其中一个摇臂上带动纱卷转动,所述抬升手柄安装在另一个摇臂的端部,翻转型材翻转角度大小及位置通过调整弹簧阻尼限位装置进行控制;这种方式的装置无法实现自锁,限位固定都依靠拧紧弹簧阻尼限位装置中的调节限位螺栓实现,操作非常不方便,由于弹簧阻尼限位装置中设有拉簧的阻尼背压力限制,翻转起来特别费力,导致操作者使用非常不便捷,一边要用手提升起手柄,一边要锁紧限位螺栓,不能实现单手简易操作,容易造成摇臂滑落挤压到手,容易产生危险;同时这种装置不能应用到自动化抬升机构中,由于弹簧阻尼限位装置中背压弹簧的阻挡和束缚,该装置只能运用到人工操纵的机构中,技术应用前景相对较窄。
技术实现要素:
3.为解决上述背景技术中提出的问题,本发明的目的在于提供一种旋转式限位自锁式翻转装置,让摇臂的锁紧固定与纱卷的拿取更加简单、便捷,同时在本装置在内部自锁的情况下可以通过简单的角度翻转实现摇架抬升自动固定,操作者可以轻松取下满卷的纱,解决上述问题。
4.技术方案:一种旋转式限位自锁式翻转装置,包括:翻转型材、卷绕机构、纱卷、抬升手柄、摇臂、翻转轴承支座、翻转轴,所述翻转轴承支座设置在翻转型材两端,并通过翻转轴将翻转型材安装在翻转轴承支座,使翻转型材能围绕与翻转轴承支座安装位置转动,纱卷通过摇臂固定在翻转型材上,纱卷与摇臂之间设有轴承,所述卷绕机构安装在其中一个摇臂上带动纱卷转动,所述抬升手柄安装在另一个摇臂的端部,还包括:限位自锁装置,所述限位自锁装置至少安装在翻转型材一端,设置在翻转型材与翻转轴承支座之间,用于控制翻转型材与翻转轴承支座之间的旋转角度,所述限位自锁装置中心设有通孔,用于安装翻转轴,所述限位自锁装置包括:固定盘、蝶式限位块、固定销轴、翻转盘;所述固定盘、翻转盘分别通过螺栓固定在翻转轴承支座和翻转型材上,使固定盘、翻转盘相对设置,翻转盘面向固定盘的一面设有迷宫槽,所述蝶式限位块通过固定销轴安装在固定盘上,蝶式限位块在外力作用下能围绕固定销轴转动,并使蝶式限位块位于翻转盘上的迷宫槽中,通过蝶式限位块旋转位置,对迷宫槽进行限位,进而对固定盘与翻转盘和固定盘之间的旋转角度
进行限位。
5.进一步的,所述迷宫槽包括:圆弧槽、扇形槽,圆弧槽设置在扇形槽一侧,圆弧槽与扇形槽位于同一圆心上,所述扇形槽与圆弧槽外壁上设有开口,是圆弧槽内圈侧壁弧度长大于外圈侧壁弧度长,并且扇形槽外壁远离圆弧槽位置还设有向内的限位凸起。
6.进一步的,所述蝶形限位块为圆弧限位块,所述圆弧限位块左右两侧设有向内凹的v型槽,上下设有向内凹弧形槽。
7.进一步的,所述限位凸起为m点,圆弧槽内壁靠近扇形槽的端点为n点,m点到n点的距离小于圆弧限位块两个v型槽槽顶的长度,大于圆弧限位块两个v型槽槽底的长度。
8.进一步的,还包括角度传感器,所述角度传感器安装在翻转轴承支座上,并与翻转轴连接,实现对角度的采集。
9.进一步的,所述卷绕机构包括:驱动电机、传动机构组成,驱动电机通过传动机构与纱卷连接,驱动纱卷转动。
10.与现有技术相比,本发明揭示了一种煤矿用多功能复合抗拉型采煤机用橡套扁电缆,具体有益效果如下:(1)通过限位自锁装置解决了人工落纱时无法固定摇臂机构的费时费力问题,减少了人工握持带来的不稳定和操作危险因素;(2)通过简单的迷宫槽和蝶式限位块的回旋触碰、阻挡;巧妙的实现了翻转自锁,传动结构设计非常紧凑,对于空间位置局限的使用场合,非常小巧适用;(3)此装置既可以满足人工简便手动操纵的需求,也可以将设计角度和翻转限位点配置到电气驱动型的卷绕翻转抬升结构上,实现自动化自锁翻转、定位,通用和适配性很强。
附图说明
11.图1为背景技术中后侧立体结构示意图;图2为背景技术中前侧立体结构示意图;图3为本发明立体结构示意图;图4为本发明后视结构示意图;图5为本发明侧视翻转状态结构示意图;图6为本发明局部爆炸结构示意图;图7为限位自锁装置爆炸结构示意图;图8为限位自锁装置剖视结构示意图;图9为限位自锁装置初始位置状态结构示意图;图10为限位自锁装置开始旋转抬升状态结构示意图;图11为限位自锁装置顺时针方向锁状态结构示意图;图12为限位自锁装置逆时针方向锁状态结构示意图;图13为限位自锁装置限位选择状态结构示意图;图14为限位自锁装置复位前调整状态结构示意图;图15为限位自锁装置初始复位状态结构示意图;图中:1、翻转型材;2、卷绕机构;3、纱卷;4、抬升手柄;5、摇臂;6、翻转轴承支座;7、
翻转轴;8、限位自锁装置;81、固定盘;82、蝶式限位块;821、v型槽;822、弧形槽;83、固定销轴;84、翻转盘;841、圆弧槽;842、扇形槽;9、角度传感器。
具体实施方式
12.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
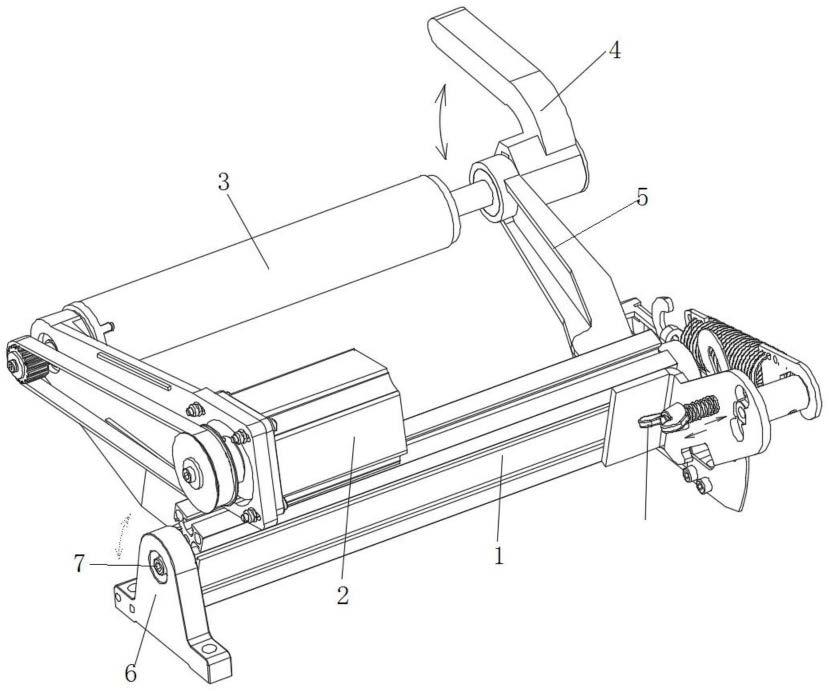
13.如图3-8所示,本发明提供一种技术方案:一种旋转式限位自锁式翻转装置,包括:翻转型材1、卷绕机构2、纱卷3、抬升手柄4、摇臂5、翻转轴承支座6、翻转轴7,所述翻转轴承支座6设置在翻转型材1两端,并通过翻转轴7将翻转型材1安装在翻转轴承支座6,使翻转型材1能围绕与翻转轴承支座6安装位置转动,所述翻转轴承支座6上设有轴承,纱卷3通过摇臂5固定在翻转型材1上,纱卷3与摇臂5之间设有轴承,所述卷绕机构2安装在其中一个摇臂5上带动纱卷3转动,所述抬升手柄4安装在另一个摇臂5的端部,还包括:限位自锁装置8,所述限位自锁装置8至少安装在翻转型材1一端,设置在翻转型材1与翻转轴承支座6之间,用于控制翻转型材1与翻转轴承支座6之间的旋转角度,所述限位自锁装置8中心设有通孔,用于安装翻转轴7,所述限位自锁装置8包括:固定盘81、蝶式限位块82、固定销轴83、翻转盘84;所述固定盘81、翻转盘84分别通过螺栓固定在翻转轴承支座6和翻转型材1上,使固定盘81、翻转盘84相对设置,翻转盘84面向固定盘81的一面设有迷宫槽,所述蝶式限位块82通过固定销轴83安装在固定盘81上,蝶式限位块82在外力作用下能围绕固定销轴83转动,并使蝶式限位块82位于翻转盘84上的迷宫槽中,通过蝶式限位块82旋转位置,对迷宫槽进行限位,进而对固定盘81与翻转盘84和固定盘81之间的旋转角度进行限位。
14.本实例中进一步的,所述迷宫槽包括:圆弧槽841、扇形槽842,圆弧槽841设置在扇形槽842一侧,圆弧槽841与扇形槽842位于同一圆心上,所述扇形槽842与圆弧槽841外壁上设有开口,是圆弧槽841内圈侧壁弧度长大于外圈侧壁弧度长,并且扇形槽842外壁远离圆弧槽841位置还设有向内的限位凸起。
15.本实例中进一步的,所述蝶形限位块为圆弧限位块,所述圆弧限位块左右两侧设有向内凹的v型槽821,上下设有向内凹弧形槽822。
16.本实例中进一步的,所述限位凸起为m点,所述m点为上限位点,圆弧槽841内壁靠近扇形槽842的端点为n点,所述n点为下限位点和滑入起点,m点到n点的距离小于圆弧限位块两个v型槽821槽顶的长度,大于圆弧限位块两个v型槽821槽底的长度。
17.本实例中进一步的,还包括角度传感器9,所述角度传感器9安装在翻转轴承支座6上,并与翻转轴7连接,实现对角度的采集,方便后期自动模式的控制,也可以采集实时的角度。
18.本实例中进一步的,所述卷绕机构2包括:驱动电机、传动机构组成,驱动电机通过传动机构与纱卷3连接,驱动纱卷3转动。
19.限位自锁装置8的工作原理,为了方便描述在固定盘81上设置一点参考零位点p点;
如图9所示,初始位置:摇臂5处于未抬升状态,翻转盘84上圆弧槽841外壁端点与固定盘81上的参考零点p之间的角度为-a
°
(p左侧为-),蝶式限位块82处于翻转盘84的圆弧槽841中,不能进行翻转,摇臂5也只能顺时针可以抬升,逆时针旋转受到蝶式限位块82限制,不可旋转;如图10所示,开始旋转抬升:摇臂5逐渐抬升,某一时刻翻转盘84上圆弧槽841外壁端点与固定盘81上考零点p之间的角度为+b
°
(p右侧为+),蝶式限位块82已经脱离翻转盘84的圆弧槽841到达内圈的n点(未触及m点),此时翻转盘84仍有可以顺或逆时针的小范围旋转空间;如图11所示,顺时针方向锁:摇臂5继续逐渐抬升,某一时刻,翻转盘84上圆弧槽841外壁端点与固定盘81上考零点p之间的角度为+c
°
(c>b),蝶式限位块82已经触及翻转盘84上的m点,远离了n点,此时翻转盘84上的m点已经被蝶式限位块82在顺时针方向上锁住,不可以继续瞬时针旋转,只能逆时针小角度回转;如图12所示,逆时针方向锁:摇臂5不能继续顺时针抬升,只能逆时针回旋,某一时刻,翻转盘84上圆弧槽841外壁端点与固定盘81上考零点p之间的角度为-d
°
(a>d),蝶式限位块82已经触及翻转盘84上的n点,远离了m点,此时翻转盘84上的m点已经被蝶式限位块82在逆时针方向上锁住,不可以继续逆时针旋转,配套抬升机构存在设定角度的悬空,此时方便操作者进行取纱动作;如图13所示,限位选择:摇臂5只能顺时针抬升,某一时刻,翻转盘84上圆弧槽841外壁端点与固定盘81上考零点p之间的角度为+e
°
(c>e>b),上圆弧槽841外壁端点快要触及翻转盘84上的m点,远离了n点;此时如果翻转盘84继续顺时针旋转,则符合图11动作结果-顺时针方向被锁住;如果翻转盘84逆时针回转,m点触及蝶式限位块82,将蝶式限位块82逆时针拨正符合图14动作结果;如图14所示,复位前调整:摇臂5选择逆时针回转,某一时刻,翻转盘84上圆弧槽841外壁端点与固定盘81上考零点p之间的角度为+f
°
(f>e),蝶式限位块82的头端被m点通过触碰切线运动慢慢拨正后开始脱离,n点也与蝶式限位块82的末端平行,确保蝶式限位块82可以顺利滑进型腔;如图15所示,初始复位:摇臂5选择逆时针回转,某一时刻,翻转盘84翻转盘84上圆弧槽841外壁端点与固定盘81上考零点p之间的角度为-h
°
(h<a)
°
,蝶式限位块82被m点拨正后远离,沿着n点滑进翻转盘84的初始型腔内;当翻转盘84继续逆时针回转至角度-a
°
实现图9的初始状态。
20.本装置的兼容扩展功能丰富,手动模式下只需要单手轻轻抬起抬升手柄4,到达指定的角度回旋手柄就可以实现装置自锁,比一般的翻转机构更加节省操作时间和劳动强度;自动模式下直接通过在翻转连接座端外接步进电机,直接操控翻转型材1实现精准角度翻转,自锁和解锁功能可通过plc控制步进电机旋转角度、旋转停留时间等功能实现,全程自动化控制功能达成;由于限位自锁装置8采用端面法兰盘式连接结构设计,结构设计非常紧凑,空间占用非常少,配套设备使用在功能满足前提下、外部美观性也大幅提升;配套使用可以使翻转稳定提高,装置的维护、安装、更换都非常便捷,成本低、性价比高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1