一种基于四足机器人的自主充电方法与流程
一种基于四足机器人的自主充电方法
【技术领域】
1.本技术涉及移动机器人自动充电的技术领域,尤其涉及一种基于四足机器人的自主充电方法。
背景技术:
2.随着机器人的自主导航和定位技术的不断成熟,越来越多的机器人将会投入到工业巡视作业当中,替代人类实现24小时不间断巡检工作,当前大部分机器人,特别是足式四足机器人,电池储电100%的情况下,可以持续完成2-3个小时的巡检工作,那么合理的四足机器人电量管理以及自动充电功能非常必要,目前市场上还没有非常成熟、稳定、可大批量应用的自主充电方法。
技术实现要素:
3.本发明的目的在于提供一种基于四足机器人的自主充电方法,四足机器人可自主充电,实现24小时不间断工作。
4.本发明提供了一种基于四足机器人的自主充电方法,包括如下步骤:
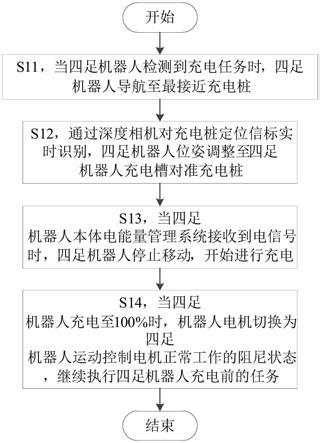
5.s11,当四足机器人检测到充电任务时,四足机器人导航至最接近充电桩;
6.s12,通过深度相机对充电桩定位信标实时识别,四足机器人位姿调整至四足机器人充电槽对准充电桩;
7.s13,当四足机器人本体电能量管理系统接收到电信号时,四足机器人停止移动,开始进行充电。
8.进一步地,在充电桩初次使用前,为充电桩生成充电桩定位信标,包括如下步骤:
9.s01,四足机器人从充电桩位置出发,采用slam建图服务构建巡视区域地图;
10.s02,为充电桩创建标记字典;
11.s03,由四足机器人识别充电桩,生成充电桩定位标记图像;
12.s04,将充电桩定位标记图像输出为充电桩定位信标,同时依据充电桩定位信标标定深度相机内参。
13.进一步地,所述步骤s11中,当四足机器人电量达到最低阈值电量时自动开始充电任务,所述最低阈值电量大于等于四足机器人运行到最接近充电桩所需的最低电量。
14.进一步地,所述步骤s11中,四足机器人采用全局路径规划和/或局部路径规划制定充电导航路线。
15.进一步地,所述步骤s04中,所述充电桩定位信标为将充电桩定位标记图像打印后,张贴在充电桩上方。
16.进一步地,所述深度相机标定包括:
17.从世界坐标系转为相机坐标系,包括相机外参,确定了相机在某个三维空间中的位置和朝向r,t等参数,是三维点到三维点的转换;
18.从相机坐标系转为成像平面坐标系,包括相机内参,对相机物理特性的近似k等参
数;
19.计算投影矩阵:p=k[r|t],是一个3
×
4矩阵,混合了内参和外参而成。
[0020]
进一步地,所述步骤s11中所述最接近充电桩为空闲充电桩;若不存在满足要求的空闲充电桩时,则选择导航至距离最近占用充电桩等待。
[0021]
进一步地,所述步骤s13中进行充电时整体电机切换至四足机器人运动控制电机不工作的无阻尼状态;所述步骤s11中当四足机器人检测到充电任务时,自动保存当前执行任务进度;当充电至100%时,四足机器人电机切换为四足机器人运动控制电机正常工作的阻尼状态,继续执行四足机器人充电前的任务。
[0022]
进一步地,当四足机器人充电至60%-90%时,四足机器人电机切换为四足机器人运动控制电机正常工作的阻尼状态,继续执行四足机器人充电前的任务;任务完成后,四足机器人再执行充电任务,将电量冲至100%。
[0023]
进一步地,所述步骤s12中,四足机器人位姿调整为通过调整四足机器人四足位移来调整充电槽与充电桩高度、左右和前后的偏移。
[0024]
与现有技术相比,本技术有如下优点:
[0025]
通过slam建图和充电桩定位,使用深度相机标定,调整四足机器人位姿,实现充电任务;
[0026]
通过设置合理的充电桩数量及全局路径规划以及局部路径规划,实现四足机器人24小时不间断自主巡检工作,提高四足机器人的运行时间,提高运行效率,减少四足机器人意外断电风险几率。
【附图说明】
[0027]
图1为本发明生成充电桩定位信标方法的流程图。
[0028]
图2为本发明基于四足机器人的自主充电方法的流程图。
[0029]
图3为本发明基于四足机器人的自主充电方法的流程图。
【具体实施方式】
[0030]
为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下,但本发明并不限于此。
[0031]
如图1所示,一种基于四足机器人的自主充电方法,包括如下步骤:
[0032]
一、为充电桩生成充电桩定位信标:
[0033]
s01,四足机器人从充电桩位置出发,采用slam建图服务构建巡视区域地图;
[0034]
s02,提取充电桩特征,为充电桩创建标记字典;
[0035]
s03,由四足机器人识别充电桩,生成充电桩定位标记图像;生成包含位姿信息的二维码;
[0036]
s04,将充电桩定位标记图像输出为充电桩定位信标,同时依据充电桩定位信标标定深度相机内参,将二维码按照200*200像素打印,张贴在充电桩上方,并进行深度相机标定,从世界坐标系转为相机坐标系,包括相机外参,确定了相机在某个三维空间中的位置和朝向r,t等参数,是三维点到三维点的转换;从相机坐标系转为成像平面坐标系,包括相机内参,对相机物理特性的近似k等参数;计算投影矩阵:p=k[r|t],是一个3
×
4矩阵,混合了
内参和外参而成。
[0037]
二、四足机器人充电
[0038]
以四足机器人为例:
[0039]
s11,当四足机器人检测到充电任务时,四足机器人导航至最接近充电桩;四足机器人在执行任务过程中实时检测剩余电量,当检测到剩余电量达到最低阈值电量,如30%-50%时,自动保存当前执行任务进度,开始进行充电任务,四足机器人采用全局路径规划和/或局部路径规划制定充电导航路线至最接近的空闲充电桩,若不存在满足要求的空闲充电桩时,则选择导航至距离最近占用充电桩等待;四足机器人按照制定的充电导航路线导航至充电桩处;
[0040]
s12,通过深度相机对充电桩定位信标实时识别,四足机器人位姿调整至四足机器人充电槽对准充电桩;通过深度相机识别张贴在充电桩上方的充电桩定位信标,即200*200像素打印的二维码图像,通过预先标定的深度相机内参,通过调整四足机器人四足位移来调整充电槽与充电桩高度、左右和前后的偏移,使得四足机器人充电槽对准充电桩;并前后移动,使四足机器人充电槽与充电桩对接;
[0041]
s13,当四足机器人本体电能量管理系统接收到电信号时,四足机器人停止移动,开始进行充电;充电时整体电机切换至四足机器人运动控制电机不工作的无阻尼状态;
[0042]
s14,当四足机器人充电至100%时,四足机器人电机切换为四足机器人运动控制电机正常工作的阻尼状态,继续执行四足机器人充电前的任务。
[0043]
从本方法的另一个层面,根据四足机器人运行区域合理规划运行区域内充电桩数量,所述合理规划运行区域内充电桩数量为满足四足机器人在最低阈值电量时满足四足机器人在地图的任意一点都可以回到附近的充电桩进行充电。
[0044]
本专利的另一个实施例
[0045]
s11,当四足机器人检测到充电任务时,四足机器人导航至最接近充电桩;
[0046]
s12,通过深度相机对充电桩定位信标实时识别,四足机器人位姿调整至四足机器人充电槽对准充电桩;
[0047]
s13,当四足机器人本体电能量管理系统接收到电信号时,四足机器人停止移动,开始进行充电;
[0048]
s141,当四足机器人充电至60%-90%时,四足机器人电机切换为四足机器人运动控制电机正常工作的阻尼状态,继续执行四足机器人充电前的任务;
[0049]
s15,任务完成后,四足机器人再执行充电任务,将电量冲至100%。
[0050]
目前的电池有快充阶段和涓流补电阶段,快充阶段充电速度较高,而涓流补电阶段充电速度较低;当四足机器人执行的任务优先级较高时,而又不得不先执行充电任务时,利用电池的快充模式,将四足机器人充电至60%-90%时,即停止充电,四足机器人电机切换为四足机器人运动控制电机正常工作的阻尼状态,继续执行四足机器人充电前的任务;当任务完成后,四足机器人再执行充电任务,将电量冲至100%;这样可以提高任务的执行效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1