一种侧置门架式绿篱修剪机器人
1.本发明属于公路绿化技术领域,涉及一种侧置门架式绿篱修剪机器人。
背景技术:
2.目前高速公路两侧的绿化带主要由人工使用手提式修剪机和车载式绿篱修剪机两种方式修剪。手提式修剪机劳动强度大、作业效率低、修剪一致性差;车载式绿篱修剪机通常只能一侧或两侧绿篱且智能化程度不高、设备昂贵。
3.现有的绿篱修剪机器人侧重于实现三方位修剪方式,而缺乏整体灵活性、基于机器视觉的修剪刀组高度、宽度、横向偏差协同调整和自动导航的全自动化、侧方位绿篱修剪机器人。如申请号201611099036.5公布了《一种智能公路绿化带修剪机器人》,采用三方位旋切方式进行修剪工作,但这种方式使得横梁工作臂承受较大载荷,降低了悬臂的使用寿命,并且三方位自行设计的旋切装置结构较为复杂,使得后续维修难度较大,其次该修剪机器人虽然可以进行高度和宽度的调节修剪,但宽度可调范围十分有限,同时该机构使用气缸和液压缸数量较多,采用外部灌注水泥的方法对电力线杆的破损部位进行修补,使得机构整体较为复杂,重量大,占用面积较大。申请号202121911603.9公布了《一种园林绿化用绿篱修剪装置》,该修剪装置采用皮带轮驱动修剪刀在固定轨道上通过推动装置进行修剪作业,其修剪刀具复杂,维修难度大,且不能进行修剪高度和宽度的调整,灵活度不高。申请号202021235335.9公布了《一种多功能复合绿篱修剪机》,该修剪机采用将横向修剪装置和纵向修剪装置分开布置的修剪方式修剪,不能实现三方位的协同修剪,效率较低,并且还需要作业人员在修剪作业全程中进行操控。申请号202122455758.2公布了《一种便携式升降装置》,该装置是采用两组平行四边形结构和两个电动缸来实现升降的功能,并没有与修剪刀组串联应用于绿篱修剪。
4.因此,设计一种侧置门架式修剪机器人实现对不同高度、不同宽度绿篱的全自动化修剪具有重要意义和推广应用价值。
技术实现要素:
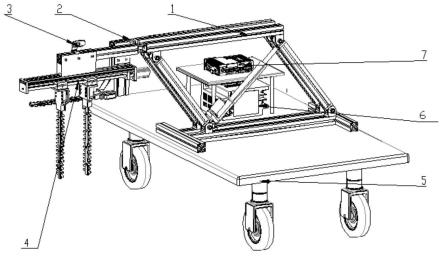
5.一种侧置门架式绿篱修剪机器人包括:平行四边形联动机构1、限位铰链2、摄像头3、侧置门架式可调刀组4、线控底盘5、供电系统6、整机控制器7。
6.其中,平行四边形联动机构1通过底座上的型材孔和紧定螺钉固定在线控底盘5上,用于支撑侧置门架式可调刀组4等结构,并用于调整刀组高度;限位铰链2通过m10螺钉与平行四边形联动机构1连接,用于侧置门架式可调刀组在不工作时可收回车内;摄像头3通过螺钉与顶部型材4-3连接,固定在正反牙t型丝杠滑轨4-2中心上方,用于刀组与绿篱中心线横向偏差检测和视觉导航;侧置门架式可调刀组4通过m10螺钉与限位铰链2连接,主要用于对不同宽度绿篱的三方位修剪,且采用侧置结构,在作业过程中可行走于绿篱侧方位;线控底盘5主要用于承载机器人各个部件,并自动巡绿篱中心线行走进行修剪作业;供电系统6固定在线控底盘上,用于为机器人行走及作业提供动力源;整机控制器7固定在底盘上
的固定支架上,通过m3螺钉相连,实现对刀组修剪高度、宽度、横向偏差的控制,以及对机器人的导航控制。
7.其中,所述的平行四边形联动机构1由底座1-1、平行四边形框架1-2、电动缸1-3。所述底座1-1由4根型材通过挤压角件1-4连接为工字形,通过紧定螺钉固定在线控底盘5上。所述平行四边形框架1-2包括型材和型材铰接,下方的水平部分与工字型底座共用相同型材,并通过螺钉和2个转动支架与电动缸1-3相连,用于支撑侧置门架式可调刀组4。所述电动缸1-3通过螺钉和2个转动支架与平行四边形框架1-2相连,用于调节侧置门架式可调刀组4的高度。
8.所述的侧置门架式可调刀组4主要由修剪刀具4-1、正反牙t型丝杠滑轨4-2,顶部型材4-3组成。其中,所述的修剪刀具4-1其中两把竖直放置,一把水平放置,两把竖直放置刀具通过角钢连接件4-4和螺钉与正反牙t型丝杠滑轨4-2的滑块固定连接,水平放置刀具通过楔形连接件4-8和螺钉与竖直放置型材4-7连接,三把刀具作为系统的末端修剪执行机构,用于绿篱的三方位修剪。所述的正反牙t型丝杠滑轨4-2,通过u型连接件和螺钉与顶部型材4-3连接,由于其正反牙特性,可实现竖直放置刀具沿中心对称移动功能;所述的顶部型材4-3,包括前置和后置型材,后置型材通过连接板4-6与竖直放置型材4-7连接,用于安装水平修剪刀具,前置型材用于安装竖直修剪刀具和正反牙t型丝杠滑轨4-2,同时,通过m10螺钉与限位铰链2连接,实现整个侧置门架式可调刀组4在不工作状态下可收回车内的功能。
9.所述的限位铰链2通过m10与平行四边形联动机构1和侧置门架式可调刀组4连接,从而带动侧置门架式可调刀组4在非工作状态收回车内,节约空间。
10.所述的摄像头3通过螺钉与顶部型材4-3连接,固定在正反牙t型丝杠滑轨4-2中心上方,用于检测刀组与绿篱中心线的横向偏差和视觉导航,保证修剪过程中侧置门架式可调刀组的中心位于绿篱中心线上。
11.所述的线控底盘5的4个全向轮根据导航信息调整角度和速度。
12.所述的供电系统6通过紧定螺钉安装在线控底盘5上,用于给线控底盘5、电动缸1-3和侧置门架式可调刀组4供电。
13.所述的控制器7通过螺钉安装在线控底盘的固定支架固定上,通过串口与电动缸1-3和侧置门架式可调刀组4通讯,通过can与线控底盘5通讯。
14.一种侧置门架式绿篱修剪机器人的控制方法主要包括绿篱修剪高度、修剪宽度和沿绿篱中心线修剪三部分,分别如下:
15.(1)绿篱修剪高度控制
16.修剪高度的调控方法是通过调控平行四边形联动机构1实现侧置门架式可调刀组2的调整,以达到调节修剪高度的目的。首先根据摄像头3的视觉系统计算出的实际绿篱高度与目标修剪高度差δy,调节电动缸的伸缩量δl,电动缸驱动平行四边形联动机构动作,从而实现修剪刀具总成高度的调整。
17.记平行四边形联动机构1的上端型材1-7长度为a,侧面型材1-6长度为b,电动缸的原长为l0,实际绿篱高度与目标修剪高度差δy与电动缸伸缩长度δl之间关系如下
[0018][0019]
(2)绿篱修剪宽度控制
[0020]
修剪宽度的控制方法是首先根据摄像头7的视觉系统计算出的实际绿篱宽度与两个垂直修剪刀组的宽度差δx’,然后调控正反牙t型丝杆滑轨2-7实现垂直修剪刀组2-8的距离调整,进而实现绿篱修剪宽度的控制。
[0021]
(3)沿绿篱中心线修剪
[0022]
沿绿篱中心线修剪是通过调控线控底盘3与绿篱中心线的横向偏差实现的。首先利用摄像机7的视觉系统计算出绿篱实际中心线与视觉系统的实际中心线偏差δx,据此推算出在速度v时线控底盘3转向轮的调控角度δθ,通过不断调控δθ实现对偏差δx的修正,使修剪装置底盘始终巡绿篱中心线平行行驶,从而实现修剪刀具总成的对刀控制。
[0023]
转向轮调控角度δθ的计算方法为:首先对修剪机器人进行运动分析,当侧置门架式可调刀组中心线与绿篱中心线偏差δx时,偏航角度δθ、底盘行驶距离s与δx之间存在如下关系:
[0024][0025]
则有:
[0026][0027]
本发明专利的有益效果在于:
[0028]
1、本发明专利采用平行四边形联动机构,通过一个电动缸能准确到达修剪位置,其结构稳定、简单。
[0029]
2、本发明专利中的修剪刀具总成,通过正反牙丝杆,满足不同修剪尺寸需求,同时保证两侧刀具完全对称,同时实现三方位修剪。
[0030]
3、本发明专利中的图像采集系统,通过改变全向轮,使刀具一直位于绿篱的正上方,保证修剪的准确性。
[0031]
4、本发明专利中刀具可进行替换拆卸,操作简单。
[0032]
5、本发明专利中活动铰链,可满足系统装置在不工作时刀具的回收,节约空间,减少运输成本。
[0033]
6、本发明专利结构安全稳定、成本低,适合不同户外环境的使用。
[0034]
7、本发明专利中的门架式刀组采用侧置结构,使机器人在作业过程中,若绿篱一侧无法通行时也不会影响机器人正常行驶,增强机器人工作的灵活性。
附图说明
[0035]
图1为侧置门架式绿篱修剪机器人整体结构图;
[0036]
图2为平行四边形联动机构结构图;
[0037]
图3为侧置门架式可调刀组结构图;
[0038]
图4为侧置门架式可调刀组修剪高度控制原理图;
[0039]
图5为平行四边形联动机构长度关系示意图;
[0040]
图6为侧置门架式可调刀组修剪宽度控制原理图;
[0041]
图7为巡绿篱中线对刀控制原理图;
[0042]
图8为绿篱修剪机器人运动分析示意图;
[0043]
图9为修剪机器人修剪工作示意图;
[0044]
图10为视觉对中示意图;
[0045]
图11为机器人刀具回收状态图。
具体实施方式
[0046]
为使本发明的目的、技术方案和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。基于本发明中的具体实施方式,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其他实施方式,都属于本发明所保护的范围。
[0047]
实施例:
[0048]
图1是本实施例侧置门架式绿篱修剪机器人的结构图。一种侧置门架式绿篱修剪机器人包括:平行四边形联动机构1、限位铰链2、摄像头3、侧置门架式可调刀组4、线控底盘5、供电系统6、整机控制器7。
[0049]
其中,平行四边形联动机构1通过底座上的型材孔和紧定螺钉固定在线控底盘5上,用于支撑侧置门架式可调刀组4等结构,并用于调整刀组高度;限位铰链2通过m10螺钉与平行四边形联动机构1连接,用于侧置门架式可调刀组在不工作时可收回车内;摄像头3通过螺钉与顶部型材4-3连接,固定在正反牙t型丝杠滑轨4-2中心上方,用于刀组与绿篱中心线横向偏差检测和视觉导航;侧置门架式可调刀组4通过m10螺钉与限位铰链2连接,主要用于对不同宽度绿篱的三方位修剪,且采用侧置结构,在作业过程中可行走于绿篱侧方位;线控底盘5主要用于承载机器人各个部件,并自动巡绿篱中心线行走进行修剪作业;供电系统6固定在线控底盘上,用于为机器人行走及作业提供动力源;整机控制器7固定在底盘上的固定支架上,通过m3螺钉相连,实现对刀组修剪高度、宽度、横向偏差的控制,以及对机器人的导航控制。
[0050]
其中,所述的平行四边形联动机构1由底座1-1、平行四边形框架1-2、电动缸1-3。所述底座1-1由4根型材通过挤压角件1-4连接为工字形,通过紧定螺钉固定在线控底盘5上。所述平行四边形框架1-2包括型材和型材铰接,下方的水平部分与工字型底座共用相同型材,并通过螺钉和2个转动支架与电动缸1-3相连,用于支撑侧置门架式可调刀组4。所述电动缸1-3通过螺钉和2个转动支架与平行四边形框架1-2相连,电动缸1-3上部的推杆圆孔与连接轴螺纹配合,连接轴通过螺纹与平行四边形框架1-2拧紧,用于调节侧置门架式可调刀组4的高度。
[0051]
如图3所示,所述的侧置门架式可调刀组4主要由修剪刀具4-1、正反牙t型丝杠滑轨4-2,顶部型材4-3组成。其中,所述的修剪刀具4-1其中两把竖直放置,一把水平放置,两把竖直放置刀具通过角钢连接件4-4和螺钉与正反牙t型丝杠滑轨4-2的滑块固定连接,水平放置刀具通过楔形连接件4-8和螺钉与竖直放置型材4-7连接,三把刀具作为系统的末端修剪执行机构,用于绿篱的三方位修剪。所述的正反牙t型丝杠滑轨4-2,通过u型连接件和
螺钉与顶部型材4-3连接,由于其正反牙特性,可实现竖直放置刀具沿中心对称移动功能;所述的顶部型材4-3,包括前置和后置型材,后置型材通过连接板4-6与竖直放置型材4-7连接,用于安装水平修剪刀具,前置型材用于安装竖直修剪刀具和正反牙t型丝杠滑轨4-2,同时,通过m10螺钉与限位铰链2连接,实现整个侧置门架式可调刀组4在不工作状态下可收回车内的功能。
[0052]
所述的限位铰链2通过m10与平行四边形联动机构1和侧置门架式可调刀组4连接,从而带动侧置门架式可调刀组4在非工作状态收回车内,节约空间。
[0053]
所述的摄像头3通过螺钉与顶部型材4-3连接,固定在正反牙t型丝杠滑轨4-2中心上方,用于检测刀组与绿篱中心线的横向偏差和视觉导航,保证修剪过程中侧置门架式可调刀组的中心位于绿篱中心线上。
[0054]
所述的线控底盘5的4个全向轮根据导航信息调整角度和速度。
[0055]
所述的供电系统6通过紧定螺钉安装在线控底盘5上,用于给线控底盘5、电动缸1-3和侧置门架式可调刀组4供电。
[0056]
所述的控制器7通过螺钉安装在线控底盘的固定支架固定上,通过串口与电动缸1-3和侧置门架式可调刀组4通讯,通过can与线控底盘5通讯。
[0057]
一种侧置门架式绿篱修剪机器人的控制方法主要包括绿篱修剪高度、修剪宽度和沿绿篱中心线修剪三部分,分别如下:
[0058]
(1)绿篱修剪高度控制
[0059]
修剪高度的调控方法是通过调控平行四边形联动机构1实现侧置门架式可调刀组2的调整,以达到调节修剪高度的目的。首先根据摄像头3的视觉系统计算出的实际绿篱高度与目标修剪高度差δy,调节电动缸的伸缩量δl,电动缸驱动平行四边形联动机构动作,从而实现修剪刀具总成高度的调整。其控制原理如图4所示。
[0060]
记平行四边形联动机构1的上端型材1-7长度为a,侧面型材1-6长度为b,电动缸的原长为l0,实际绿篱高度与目标修剪高度差δy与电动缸伸缩长度δl之间关系如下,示意如图5所示。
[0061][0062]
(2)绿篱修剪宽度控制
[0063]
修剪宽度的控制方法是首先根据摄像头7的视觉系统计算出的实际绿篱宽度与两个垂直修剪刀组的宽度差δx’,然后调控正反牙t型丝杆滑轨2-7实现垂直修剪刀组2-8的距离调整,进而实现绿篱修剪宽度的控制。其控制原理如图6所示。
[0064]
(3)沿绿篱中心线修剪
[0065]
沿绿篱中心线修剪是通过调控线控底盘3与绿篱中心线的横向偏差实现的。首先利用摄像机7的视觉系统计算出绿篱实际中心线与视觉系统的实际中心线偏差δx,据此推算出在速度v时线控底盘3转向轮的调控角度δθ,通过不断调控δθ实现对偏差δx的修正,使修剪装置底盘始终巡绿篱中心线平行行驶,从而实现修剪刀具总成的对刀控制。调节底盘对刀控制原理图如图7所示。
[0066]
转向轮调控角度δθ的计算方法为:首先对修剪机器人进行运动分析,如图8所示。
[0067]
当侧置门架式可调刀组中心线与绿篱中心线偏差δx时,偏航角度δθ、底盘行驶距离s与δx之间存在如下关系:
[0068][0069]
则有
[0070][0071]
绿篱实际中心线与视觉系统的实际中心线偏差δx可通过摄像机7的视觉系统进行检测,车速v可根据底盘上的测速传感器检测得到。
[0072]
本发明专利的有益效果在于:
[0073]
1、本发明专利采用平行四边形联动机构,通过一个电动缸能准确到达修剪位置,其结构稳定、简单。
[0074]
2、本发明专利中的修剪刀具总成,通过正反牙丝杆,满足不同修剪尺寸需求,同时保证两侧刀具完全对称,同时实现三方位修剪。
[0075]
3、本发明专利中的图像采集系统,通过改变全向轮,使刀具一直位于绿篱的正上方,保证修剪的准确性。
[0076]
4、本发明专利中刀具可进行替换拆卸,操作简单。
[0077]
5、本发明专利中活动铰链,可满足系统装置在不工作时刀具的回收,节约空间,减少运输成本。
[0078]
6、本发明专利结构安全稳定、成本低,适合不同户外环境的使用。
[0079]
7、本发明专利中的门架式刀组采用侧置结构,使机器人在作业过程中,若绿篱一侧无法通行时也不会影响机器人正常行驶,增强机器人工作的灵活性。
[0080]
图9是本实施例侧置门架式绿篱修剪机器人修剪工作示意图。需要1将侧置门架式可调刀组4通过限位铰链2向车外打开,直到修剪刀组上的顶部型材8与平行四边形联动机构1的上端型材9平行,将限位铰链2锁死2将修剪机器人移动至待修剪矩形绿篱前方,将所述的整机控制器7与计算机连接。
[0081]
给机器人供电,进行修剪刀组工作位置调整。打开摄像头3,确保待修剪绿篱带在所述摄像头视野内,用计算机中的上位机软件对所述平行四边形联动机构1中的电动缸10进行控制。电动缸10上端通过螺钉和2个转动支架与平行四边形框架11连接,电动缸10伸缩推动平行四边形框架11绕活动铰链12转动,平行四边形框架11上端通过活动铰链13与上端型材9连接。平行四边形框架14下端通过活动铰链15与“工”字形型材底座连接;上端通过活动铰链16与上端型材9连接,由于平行四边形框架14与平行四边形框架11长度相等,因此在两框架转动时,上端型材9始终保持水平,并带动侧置门架式可调刀组4下降直到达到需求的绿篱修剪高度,电动缸10自锁,整个平行四边形联动机构1保持锁定状态。在平行四边形联动机构的下降过程中,当电动缸长度为l时,平行四边形高度y、平行四边形水平边a、邻边b与l之间存在如下关系:
[0082]
[0083]
记电动缸原长为l0,则高度变化δy与电动缸长度变化δl之间关系为:
[0084][0085]
打开位于侧置门架式可调刀组4上的摄像头3,实时检测绿篱中心线与修剪刀组中心线之间的横向偏差,并反馈到整体控制器7,整体控制器7向线控底盘5发送控制信号,驱动全向轮17使线控底盘5带动修剪刀组横向移动,直到摄像头3检测到的绿篱中心线与修剪刀组中心线之间的横向偏差为0,全向轮17停止横向移动。其中横向偏差的测量由图像处理的方法判定:用摄像头3获取待修剪矩形绿篱带的图像,上位机软件根据图像提取矩形绿篱带的两条边缘轮廓,获得其中心线,当中心线与摄像机3视野的中心线重合时,整体控制器7向线控底盘5发送停止信号,线控底盘5停止横向移动,横向偏差为0,修剪刀组此时处于合适工作位置,如图10所示。
[0086]
确保横向偏差为0后,计算机根据提前在上位机软件输入的修剪预设宽度向整体控制器7发送宽度调整数据,整体控制器7向丝杠滑轨电机18发送控制信号,丝杠滑轨电机18旋转带动正反牙t型丝杠滑轨19滑块上的修剪刀具20向中间对称靠拢移动,直到达到绿篱修剪的预设宽度,电机自锁,此时三把修剪刀具达到需求修剪位置。
[0087]
保持摄像头3的工作状态,整体控制器7向线控底盘5发送控制信号,线控底盘5带动侧置门架式可调刀具4沿绿篱中心线方向移动,修剪刀具20启动,摄像头3实时检测横向偏差,并实时反馈到整体控制器7,整体控制器7向线控底盘5发送控制信号,调整机器人运动方向,保证横向偏差时刻为0,即修剪刀具始终处在需求的修剪位置。
[0088]
修剪工作完成后,关闭机器人电源,将侧置门架式可调刀具4通过限位铰链2收回车内,如图11所示。
[0089]
基于本发明专利中的具体实施方式,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明专利所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1