行驶作业机、插秧机、水田直播机、喷雾作业机的制作方法
本发明涉及一种行驶作业机,其具有在田地中行驶的行驶机体、对田地进行作业的作业装置和设定目标移动路径的路径设定部,目标移动路径用于行驶机体一边利用作业装置进行作业一边行驶的作业行驶。
背景技术:
1、例如,在专利文献1中公开了一种作业车,该作业车具有行驶机体(在文献中为“行驶车体c”)、对田地进行作业的作业装置(在文献中为“秧苗栽植装置w”)和设定行驶机体用于进行作业行驶的目标移动路径的路径设定部(在文献中为附图标记“68”)。路径设定部构成为,通过示教行驶来设定与用于进行自动转向的目标路径对应的示教路径,并且设定与示教路径平行的多个目标移动路径。
2、专利文献1:日本特开2017-123804号公报
3、在专利文献1中,基于通过人为操作而产生的示教路径来设定各目标移动路径,示教路径被设定为将人为操作的起点位置与人为操作的终点位置两点间连结的直线状路径。但是,在专利文献1的目标移动路径的设定中,没有考虑行驶机体的行驶轨迹。因此,即使在实际的行驶轨迹曲折的情况下,也将直线状的目标移动路径设定为后工序的目标移动路径。其结果是,在之后的实际作业行驶中,可能踩坏已作业区域的已栽植秧苗,或者在田埂转弯前后的行驶轨迹之间产生不作业区域。
4、另外,行驶机体交替地重复沿着目标移动路径的作业行驶和在田埂处向后工序的所述目标移动路径转弯的转弯行驶。但是,在专利文献1的结构中,各目标移动路径是基于示教路径而设定的,行驶机体沿目标移动路径的行驶没有被考虑到用于行驶机体在后工序中行驶的目标设定中。因此,当行驶机体以相对于实际的目标移动路径偏移的状态进行作业行驶时,在沿后工序的目标移动路径进行作业行驶时,可能踩坏已作业区域的已栽植秧苗,或者在田埂转弯前后的作业行驶轨迹之间产生不作业区域。
技术实现思路
1、鉴于上述事实,本发明的目的在于提供一种能够高精度地设定与行驶机体的作业行驶轨迹邻接的目标移动路径的行驶作业机。
2、本发明的行驶作业机的特征在于,具有:
3、行驶机体,其在田地中行驶;
4、作业装置,其对田地进行作业;
5、路径设定部,其设定目标移动路径,所述目标移动路径用于所述行驶机体一边利用所述作业装置进行作业一边进行行驶的作业行驶;
6、在所述行驶机体交替重复沿着所述目标移动路径的所述作业行驶和向下一所述目标移动路径转弯的转弯行驶而进行行驶的情况下,所述路径设定部基于在所述行驶机体沿所述目标移动路径行驶的过程中获取的位置,设定用于所述行驶机体在走过所述目标移动路径后行驶的后工序用目标。
7、根据本发明,在用于行驶机体在后工序中行驶的目标设定中,考虑了行驶机体沿目标移动路径的行驶。即,即使在行驶机体以相对于实际的目标移动路径偏移的状态进行作业行驶的情况下,也根据在行驶中获取的位置设定后工序的目标。因此,可适当地设定转弯行驶后的目标,可沿转弯行驶前的作业行驶轨迹适当地进行转弯行驶后的作业行驶。其结果是,可实现能够高精度地设定与行驶机体的作业行驶轨迹邻接的目标移动路径的行驶作业机。
8、在本结构中,优选的是,
9、所述后工序用目标是用于所述行驶机体行驶的后工序用目标移动路径。
10、根据本结构,基于已经进行了作业行驶的作业行驶轨迹来设定后工序用的目标移动路径。由此,可避免在沿后工序的目标移动路径进行作业行驶时,踩坏已作业区域的已栽植秧苗,或者在田埂转弯前后的作业行驶轨迹之间产生不作业区域的可能。其结果是,可实现能够高精度地设定与行驶机体的作业行驶轨迹邻接的目标移动路径的行驶作业机。
11、在本结构中,优选的是,
12、所述行驶作业机具有通知机构,所述通知机构在所述行驶机体从所述转弯行驶进入沿着下一所述目标移动路径的行驶时,通知所述行驶机体的位置与下一所述目标移动路径之间的偏差。
13、刚刚完成转弯行驶后的行驶机体的位置相对于目标移动路径容易偏移。因此,根据本结构,在沿下一目标移动路径行驶时通知偏移,所以驾驶者容易修正相对于目标移动路径的偏移。
14、在本结构中,优选的是,
15、所述通知机构在完成所述转弯行驶后进行通知。
16、在转弯行驶中,由于行驶机体的位置处于相对于目标移动路径偏移的状态,所以如果在转弯行驶中通知偏移,则容易给驾驶者带来故障等误解,可能给驾驶者带来麻烦。根据本结构,由于是在完成转弯行驶后通知偏移的结构,所以没有无用的通知,能够向驾驶者作出必要的通知。
17、在本结构中,优选的是,
18、在不能设定所述后工序用目标的情况下,所述通知机构通知不能设定所述后工序用目标。
19、根据本结构,因为向驾驶者通知不能设定后工序用目标的状态,所以驾驶者容易采取手动操作等措施。
20、在本结构中,优选的是,
21、所述行驶作业机具有田埂检测机构,所述田埂检测机构检测出接近田埂,
22、当所述田埂检测机构检测出接近田埂时,所述路径设定部设定所述后工序用目标。
23、沿着目标移动路径的作业行驶在田地的田埂附近才完成。根据本结构,因为通过检测出接近田埂来设定后工序用目标,所以能够基于沿着目标移动路径的作业行驶轨迹来设定后工序用目标。
24、在本结构中,优选的是,
25、在所述行驶机体从沿着所述目标移动路径的行驶进入所述转弯行驶时,所述路径设定部设定所述后工序用目标。
26、根据本结构,能够将后工序用目标兼用作转弯行驶中的目标位置。因此,即使在例如将转弯行驶设定为自动转弯的情况下,也不需要另行设定自动转弯专用的目标位置,行驶机体能够顺畅地移动到后工序用目标。
27、在本结构中,优选的是,
28、当所述行驶机体相对于所述目标移动路径倾斜预先设定的角度以上时,所述路径设定部设定所述后工序用目标。
29、根据本结构,因为基于行驶机体相对于目标移动路径的倾斜能够判断出行驶机体的转弯行驶,所以能够以简易的结构来设定后工序用目标。
30、在本结构中,优选的是,
31、在对人为操作件进行操作后,所述路径设定部设定所述后工序用目标。
32、根据本结构,因为是利用人为操作来设定后工序用目标的结构,所以例如能够防止设定无意识的后工序用目标。由此,能够选择沿着后工序用目标移动路径的作业行驶和不沿后工序用目标移动路径的作业行驶中的任一者。
33、在本结构中,优选的是,
34、所述行驶作业机具有位置检测机构,所述位置检测机构基于导航卫星的定位信号获取位置信息,
35、基于在所述作业行驶的最后阶段定位到的多个所述位置信息的平均位置来设定所述后工序用目标。
36、位置检测机构可以举出dgps(differential gps(差分全球定位系统))和rtk-gps(real time kinematic gps(实时动态全球定位系统))的例子。一般而言,rtk-gps比dgps更贵,但rtk-gps的定位精度比dgps的定位精度更高。另外,一般而言,公知在短时间内利用dgps进行两点间的定位的情况下,两点间的相对误差小。在行驶机体结束作业行驶后进行转弯行驶而向后工序用目标移动这一期间的时间为较短时间的情况下,根据本结构,即使不使用价格高昂的rtk-gps,也能够高精度地设定与行驶机体的作业行驶轨迹邻接的后工序用目标。
37、在本结构中,优选的是,
38、所述后工序用目标能够并列设定多个。
39、根据本结构,因为一起设定后工序用目标,所以例如容易设定多个行驶作业机同时进行作业行驶的情况下的后工序用目标。
40、在本结构中,优选的是,
41、基于所述行驶机体相对于所述目标移动路径的偏移来设定所述后工序用目标。
42、根据本结构,能够基于行驶机体沿目标移动路径的行驶来设定后工序用目标。
43、在本结构中,优选的是,
44、所述后工序用目标被设定为从相对于所述目标移动路径离开预先设定的间隔的位置以所述行驶机体相对于所述目标移动路径的偏移的量平行移动的状态。
45、根据本结构,能够可靠地避免在沿后工序的目标移动路径进行作业行驶时,踩坏已作业区域的已栽植秧苗,或者在田埂转弯前后的作业行驶轨迹之间产生不作业区域的可能。
46、在本结构中,优选的是,
47、所述后工序用目标能够在设定后进行校正。
48、在刚刚完成转弯行驶后,存在行驶机体相对于刚刚完成转弯行驶后的目标移动路径偏移的情况。根据本结构,即使在设定了后工序用目标的情况下,驾驶者也根据需要改变后工序用目标,从而能够消除行驶机体相对于目标移动路径的偏移。
49、在本结构中,优选的是,
50、沿所述行驶机体的作业行驶轨迹设定所述后工序用目标。
51、即使目标移动路径是直线状,也存在实际的行驶机体的作业行驶轨迹例如因行驶机体打滑或避让田地的障碍物等而变为曲线状的情况。根据本结构,即使作业行驶轨迹是曲线状,也能够以使基于后工序用目标的路径模仿作业行驶轨迹的方式设定后工序用目标。由此,可防止在沿后工序的目标移动路径进行作业行驶时,踩坏已作业区域的已栽植秧苗,或者在田埂转弯前后的作业行驶轨迹之间产生不作业区域的可能。
52、在本结构中,优选的是,
53、基于所述后工序用目标的路径是比所述作业行驶轨迹更接近直线的线形状。
54、在行驶机体的作业行驶轨迹相对于目标移动路径复杂地弯曲的情况下,如果是沿行驶机体的作业行驶轨迹设定后工序用目标的结构,则基于后工序用目标的路径也复杂地弯曲,行驶机体可能不能高精度地沿该路径行驶。根据本结构,因为将基于后工序用目标的路径设定为接近直线的线形状,所以行驶机体能够沿目标移动路径适当地进行作业行驶。
55、在本结构中,优选的是,
56、所述行驶作业机设置有控制机构,所述控制机构输出控制信号以进行所述作业行驶,
57、所述目标移动路径是大致直线状,
58、所述路径设定部作为与所述控制机构独立的功能而设定所述后工序用目标。
59、根据本结构,能够沿大致直线状的目标移动路径自动地进行作业行驶。另外,因为控制机构和路径设定部是分别独立的功能,所以在行驶机体沿目标移动路径进行了作业行驶后,能够等待驾驶者的是否沿基于后工序用目标的路径进行作业行驶的判断。
60、在本结构中,优选的是,
61、所述行驶作业机设置有控制机构,所述控制机构输出控制信号以进行所述作业行驶,
62、所述目标移动路径是大致直线状,
63、所述路径设定部作为与所述控制机构连动的功能而设定所述后工序用目标。
64、根据本结构,可实现在行驶机体沿目标移动路径进行作业行驶后设定后工序用目标,并沿基于后工序用目标的路径自动地进行作业行驶的结构。由此,能够与后工序用目标的设定连动地进行沿着基于后工序用目标的路径的自动的作业行驶。
65、在本结构中,优选的是,
66、在所述行驶机体比预先设定的距离更大幅度地偏离所述目标移动路径的情况下,所述目标移动路径不被用于所述作业行驶。
67、在行驶机体大幅度偏离目标移动路径的情况下,认为驾驶者很可能正在有意识地操作行驶机体。根据本结构,因为能够使目标移动路径不用于作业行驶,所以即使没有专用的操作件等也能够容易地使驾驶者的人为操作优先。
68、在本结构中,优选的是,
69、基于所述作业行驶的最后阶段的所述作业行驶来设定基准路径,
70、在其他田地中,所述路径设定部基于所述基准路径来设定所述后工序用目标。
71、根据本结构,因为能够将基准路径用于对其他田地的后工序用目标的设定,所以不在其他田地中进行示教行驶就能够容易地设定目标移动路径。
72、在本结构中,优选的是,
73、所述行驶作业机具有存储部,所述存储部能够针对每块田地存储多个所述基准路径。
74、根据本结构,仅通过从存储部读取与每块田地对应的基准路径,就能够设定目标移动路径,所以不需要重复示教行驶。
75、本发明的插秧机、水田直播机或喷雾作业机的特征在于,具有:
76、行驶机体,其在田地中行驶;
77、作业装置,其对田地进行作业;
78、路径设定部,其设定目标移动路径,所述目标移动路径用于所述行驶机体一边利用所述作业装置进行作业一边进行行驶的作业行驶;
79、行驶轨迹获取机构,其用于获取所述行驶机体进行行驶时的行驶轨迹;
80、所述路径设定部沿所述行驶轨迹设定所述目标移动路径。
81、根据本结构,能够利用行驶轨迹获取机构获取行驶机体的行驶轨迹,并在目标移动路径的设定中考虑行驶机体的行驶轨迹。因此,即使在例如行驶轨迹为曲线状的情况下,路径设定部也能够设定沿着该曲线状的行驶轨迹的目标移动路径作为后工序的目标移动路径。由此,可减轻在沿该后工序的目标移动路径进行作业行驶时,踩坏已作业区域的已栽植秧苗,或者在田埂转弯前后的行驶轨迹之间产生不作业区域的可能。其结果是,可实现能够将目标移动路径设定为与行驶机体的行驶轨迹高精度地邻接的行驶作业机。
82、应予说明,沿行驶轨迹设定目标移动路径的意思,并不局限于目标移动路径为与行驶轨迹完全一致的路径的意思。例如,也可以是目标移动路径为与该行驶轨迹近似的路径的意思,或者是以使基于目标移动路径行驶的结果的轨迹与该行驶轨迹近似的方式设定的路径的意思。
83、在本结构中,优选的是,
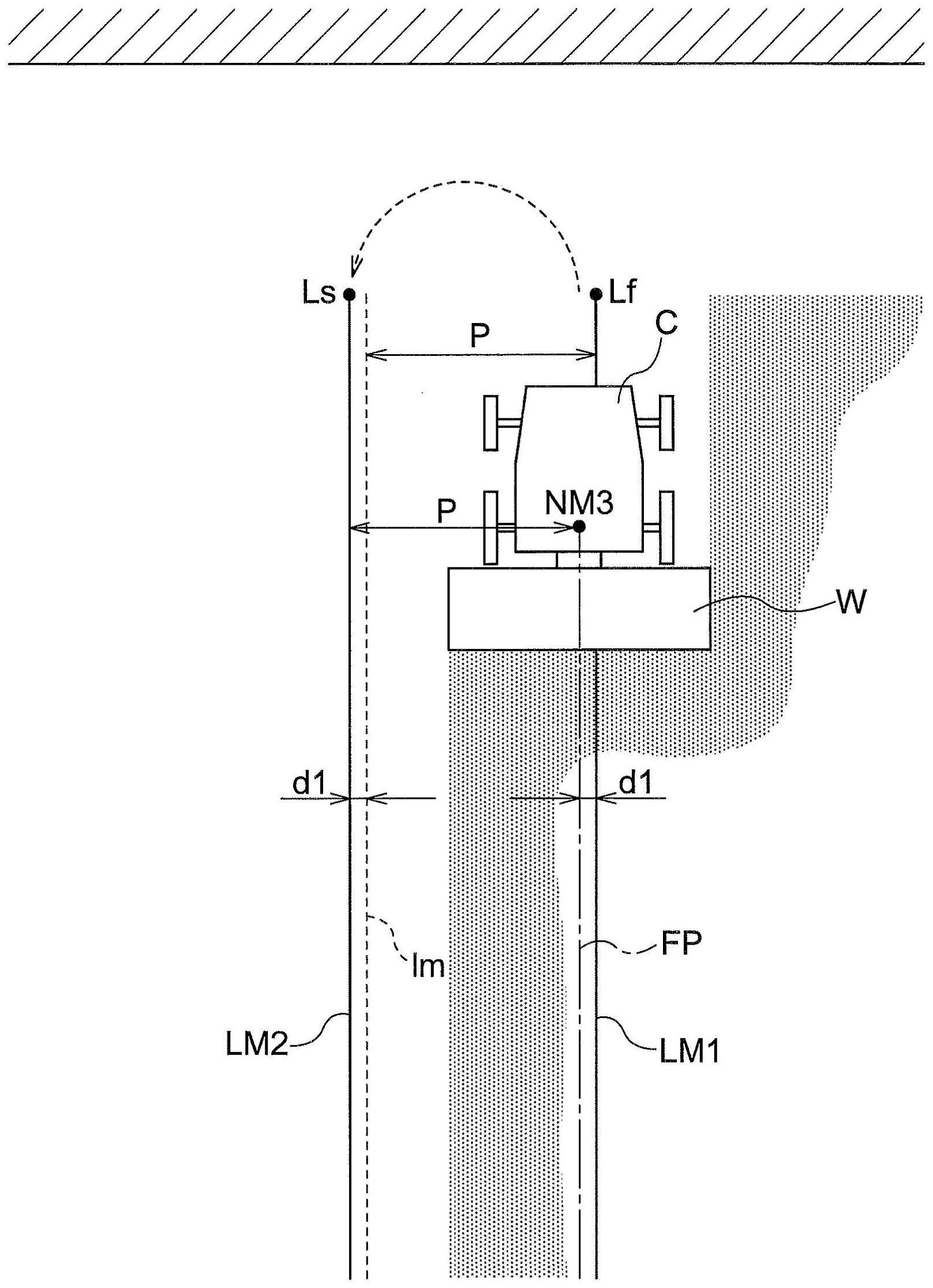
84、所述目标移动路径由与第一区域对应地设定的第一路径和与第二区域对应地设定的第二路径构成,所述第一区域是所述行驶轨迹中所述行驶机体以与预先设定的移动路径一致或大致一致的状态进行行驶的部位,所述第二区域是所述行驶轨迹中所述行驶机体以向所述预先设定的移动路径的左右方向偏移的状态进行行驶的部位,
85、所述第二路径被设定为相对于所述第一路径向所述第二区域相对于所述预先设定的移动路径偏移的一侧偏移的状态。
86、根据本结构,行驶轨迹被划分为第一区域和第二区域,目标移动路径由多个路径构成,而且,与第二区域中的行驶轨迹的偏移对应地设定第二路径。因此,例如能够利用第一路径和第二路径划分路径的设定形式,与目标移动路径由单一的路径构成的结构相比,可实现能够灵活地按照实际的行驶机体的偏移进行行驶的行驶作业机。
87、应予说明,预先设定的移动路径可以是行驶机体进行行驶时成为目标的过去的目标移动路径,或者是人为操作所希望的行驶作业机移动路径,或者是作为行驶作业机通过人为操作进行行驶的结果的行驶轨迹。
88、在本结构中,优选的是,
89、所述第一路径与所述第二路径之间的偏移量小于所述预先设定的移动路径与所述第二区域之间的偏移量。
90、如果第一路径与第二路径之间的偏移量和上一次行驶轨迹中的偏移量相同,则行驶机体基于第一路径及第二路径的行驶也可能与上一次行驶轨迹同等地、或比上一次行驶轨迹更大地弯曲,使得行驶机体的行驶不稳定。根据本结构,因为第一路径与第二路径之间的偏移量变小,所以行驶机体基于第一路径及第二路径进行行驶的结果的轨迹是比上一次行驶轨迹更接近直线的轨迹。由此,行驶机体的行驶是稳定的。
91、在本结构中,优选的是,
92、在设定多个所述目标移动路径的状态下,越是后工序,所述第一路径与所述第二路径之间的偏移量越小。
93、根据本结构,越是后工序,目标移动路径就越收敛为接近直线的路径,越是后工序,行驶机体基于第一路径及第二路径的行驶就越稳定。
94、在本结构中,优选的是,
95、所述第一路径及所述第二路径形成为直线状。
96、根据本结构,因为目标移动路径由多个直线状的路径构成,所以目标移动路径的设定简单,行驶机体容易沿目标移动路径进行行驶。
97、在本结构中,优选的是,
98、所述目标移动路径由基于所述行驶轨迹的近似曲线构成。
99、根据本结构,即使在行驶轨迹为曲线状的情况下,也能够与曲线状的行驶轨迹对应地设定与该行驶轨迹邻接的目标移动路径,行驶机体能够以模仿该行驶轨迹的方式进行行驶。
100、在本结构中,优选的是,
101、所述插秧机、水田直播机或喷雾作业机具有位置检测机构,所述位置检测机构基于导航卫星的定位信号检测表示所述行驶机体的位置的定位数据,
102、所述行驶轨迹获取机构基于所述定位数据获取所述行驶轨迹。
103、根据本结构,通过使用位置检测机构的定位数据,能够构建行驶轨迹获取机构。
104、在本结构中,优选的是,
105、所述插秧机、水田直播机或喷雾作业机具有能够计测所述行驶机体的加速度及角加速度的惯性计测机构,
106、所述行驶轨迹获取机构基于所述加速度或者所述角加速度、或所述加速度及所述角加速度双方来获取所述行驶轨迹。
107、根据本结构,通过使用惯性计测机构的加速度、角加速度、即惯性量,能够构建行驶轨迹获取机构。
108、在本结构中,优选的是,
109、所述作业装置包含栽植装置、播种装置及药剂喷雾作业装置中的至少一个。
110、根据本结构,能够适当地用于插秧机、或水田直播机或喷雾作业机。
- 还没有人留言评论。精彩留言会获得点赞!