基于慧鱼模型组建一站式猫类养护系统的方法
本发明涉及宠物饲养,尤其是基于慧鱼模型组建一站式猫类养护系统的方法。
背景技术:
1、根据《2020年中国宠物行业白皮书》统计,2020年中国猫狗宠物市场规模总和为2065亿元,其中宠物猫占比约为43%,为884亿元,同比2019年增长13.3%;此外,43.9%的人认为携宠出行十分困难。为了解决这一问题,市场上相继出现了定时投喂装置、自动化猫砂盆与宠物玩具,为宠物养护提供了很大的便利。
2、但市售的这些宠物器具,难以根据宠物具体情况进行定制,存在不便。
3、此外,现有的自动化宠物养护装置一般只能解决宠物的某一个需求,例如单独的投喂与单独的宠物陪玩,而不能做到一站式解决养猫困难,这就意味着用户不能通过购买一个设备完全解决养猫难题,更重要的是,单一的现有设备不能解决用户需要出远门时猫类无人养护的这一核心问题,与宠物市场与旅游文化的蓬勃发展不相适应。
4、慧鱼创意组合模型主要有创意组合包、培训模型、工业模型三大系列,涵盖了机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域和高新学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟,从而为实验教学、科研创新和生产流水线可行性论证提供了可能。
5、慧鱼模型(fischertechnik)是技术含量很高的工程技术类智趣拼装模型,采用含机电技术的积木式插接零件,可灵活插接为多种自定义的机电装置,是展示科学原理和技术过程的理想教具,由于其尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充,因此可以用其拼接为所需的小型机电器具并进行灵活改装。
6、本发明提出了采用慧鱼模型来制造一站式猫类养护系统,具备很强的可定制性,能根据饲养猫的具体情况进行灵活改装和定制。
技术实现思路
1、本发明提出基于慧鱼模型组建一站式猫类养护系统的方法,能直接采用慧鱼创意组合模型的各种开放式机电类积木式拼接件来制造一站式猫类养护系统,具备很强的可定制性,能根据饲养猫的具体情况进行灵活改装和定制,本发明针对日益增长的宠物养护需求,以智能性、全面性、便利性和互动性四大设计原则为基础,基于慧鱼创意组合模型设计开发,包含智能喂食模块、智能猫砂盆清洁模块和智能陪玩监控小车模块,很好地满足了猫类养护的日常需求。
2、本发明采用以下技术方案。
3、基于慧鱼模型组建一站式猫类养护系统的方法,所述方法基于慧鱼创意组合模型的拼装积木式零件的连接组合,用于形成可自行调整硬件配置的猫类养护系统,所述猫类养护系统的硬件均为以慧鱼创意组合模型的拼装积木式零件拼接组合成型的可拓展机电架构,包括独立运行的智能喂食模块、智能猫砂盆清洁模块和智能陪玩监控小车模块,所述智能喂食模块、智能猫砂盆清洁模块和智能陪玩监控小车模块的控制程序均采用慧鱼robopro编写。
4、所述方法中,拼接智能喂食模块的方法具体为:在慧鱼创意组合模型中选取拼装积木式零件,选取的拼装积木式零件包括喂食用超声波传感器(a1)、喂食用空气压缩泵(a2)、喂食用txt控制器(a3)、喂食用丝杆(a4)、喂食用皮带轮(a6)、喂食用传动齿轮(a7)、喂食用第一电机(a11)、喂食用第二电机(a8)、喂食用机架(a9)、喂食用传送带(12)、喂食用碗(a10)以及喂食用挡板(a5);
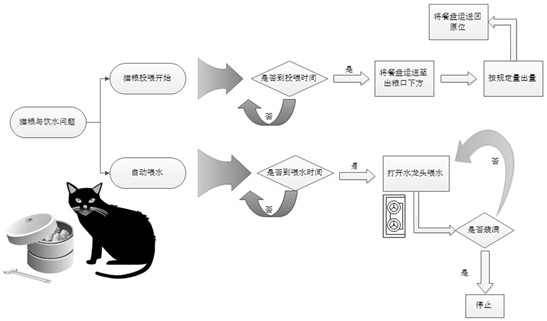
5、拼接智能喂食模块包括喂粮子模块和喂水子模块,喂粮子模块、喂水子模块均拼接至喂食用txt控制器并由其控制,其工作时,完成一次喂水与喂食称为完成一次投喂,完成投喂后,喂食用txt控制器开始计时,以在到达预设时间后进行下一次投喂;
6、使用者根据猫的饮食需求和偏好,对喂食用txt控制器进行设置,以调整投喂的食物类型、份量和投食时间;
7、选取零件的拼接方法包括喂粮子模块拼接方法和喂水子模块拼接方法。
8、喂粮子模块拼接方法具体包括以下步骤:
9、步骤s1、拼接喂食用第一电机、喂食用皮带轮、喂食用传送带、喂食用碗,形成以传送带驱动碗往复移动的第一组合体,再把第一组合体固定于喂食用机架处;
10、步骤s2、把猫粮贮器固定于第一组合体上,使猫粮贮器的输出口位于喂食用碗移动路径的终点上方;
11、步骤s3、拼接喂食用第二电机、喂食用丝杆、喂食用挡板,形成以丝杆驱动挡板往复开合移动的第二组合体;再把第二组合体固定于猫粮贮器的输出口处,使喂食用挡板打开时,能在输出口处形成半径不小于10毫米的出粮口,用于将猫粮输出至喂食用碗;
12、喂粮子模块的工作方法为:当投喂作业开始时,喂食用txt控制器先控制喂食用第一电机通电,驱动喂食用皮带轮,经喂食用传送带驱动喂食用碗移至终点,然后喂食用txt控制器驱动喂食用第二电机,经喂食用丝杆驱动喂食用挡板打开,使猫粮贮器内的猫粮经出粮口落入喂食用碗,猫粮的输出量由喂食用挡板的预设打开时长决定,当达到预设打开时长后,喂食用txt控制器控制器驱动喂食用第二电机关闭喂食用挡板,停止本次投喂的猫粮输出。
13、喂水子模块拼接方法具体包括以下步骤:
14、步骤t1、以直接方式拼接喂食用超声波传感器、喂食用空气压缩泵以形成直线形的第二组合体;
15、步骤t2、将第二组合体的传感器端置于猫饮水碗上方用于监测碗内水位;将第二组合体的泵端与水箱相连,水箱的出水口设于猫饮水碗上;
16、喂水子模块的工作方法为:投喂开始时,空气压缩泵通电并向水箱内充气,利用大气压强将饮用水压至出水口,使水流至出水口下方的碗内供猫类饮用;当超声波传感器检测到碗中水位达到阈值时,停止对空气压缩泵供电,停止本次投喂的水输出。
17、所述方法中,拼接智能猫砂盆清洁模块的方法具体为:在慧鱼创意组合模型中选取拼装积木式零件,选取的拼装积木式零件包括:清洁用超声波传感器(b1)、清洁用第一丝杆(b2)、清洁用第二丝杆(b18)、清洁用第一电机(b3)、清洁用第二电机(b4)、清洁用第三电机(b6)、清洁用第四电机(b7)、清洁用第五电机(b12)、清洁用第六电机(b16)、清洁用排泄物铲子(b5)、清洁用装置机架(b8)、清洁用紫外灯消毒灯(b10)、清洁用txt控制器(b11)、清洁用丝杆卡爪(b13)、清洁用蜗轮蜗杆(b14)、清洁用连杆起落机构(b15)、清洁用编码电机(b17);选取的清洁用排泄物铲子下部需设有可滤出猫排泄物的梳齿结构;
18、智能猫砂盆清洁模块包括与清洁用txt控制器相连的排泄物分拣子模块、排泄物打包子模块。
19、排泄物分拣子模块的拼接方法具体包括以下步骤:
20、步骤u1、先装配矩形的清洁用装置机架(b8),机架中部以容置结构形成猫砂盆,然后在机架前后端处拼接与猫砂盆底端平行的清洁用第一丝杆,使清洁用第一丝杆由第二电机、第四电机驱动;
21、步骤u2、把清洁用排泄物铲子的两侧端与清洁用第一丝杆相拼接,使清洁用排泄物铲子与猫砂盆底端平行并位于猫砂上方,且清洁用排泄物铲子能在清洁用第一丝杆、清洁用第二丝杆驱动下在机架两侧端往复移动;清洁用排泄物铲子还与第一电机拼接,使清洁用排泄物铲子能以第一电机驱动而升降;
22、步骤u3、在机架一侧端安装排泄物打包子模块的清洁用垃圾起落装置(b9),机架另一侧端作为猫砂盆入口,在机架该侧端拼接用于检测猫出入的清洁用超声波传感器;
23、排泄物分拣子模块的工作方法为:当猫进入猫砂盆时会遮挡超声波传感器,猫离开时则移除对超声波传感器的遮挡,清洁用txt控制器在判定猫离开猫砂盆后启动程序开始清洁,或是在预设清洁时间到后启动清洁;在清洁时,先开启清洁用紫外灯消毒灯,随后第二电机、第四电机同时通电,把排泄物铲子移动到猫砂盆侧端最前;接着第一电机驱动清洁用排泄物铲子下降,并把其梳齿结构插入猫砂;然后第二电机、第四电机驱动排泄物铲子返回,并在返回过程以梳齿结构过滤猫砂并滤出猫排泄物,滤出的猫排泄物送入机架侧端的排泄物打包子模块的清洁用垃圾起落装置。
24、排泄物打包子模块的拼接方法为:以第六电机、第二丝杆和剪叉式结构拼接为连杆起落机构,在连杆起落机构顶部放置垃圾袋并驱动垃圾袋升降,作为清洁用垃圾起落装置(b9);在垃圾袋升降行程的顶部,以清洁用蜗轮蜗杆固定清洁用丝杆卡爪,清洁用蜗轮蜗杆与清洁用编码电机相拼接,使清洁用丝杆卡爪能在清洁用编码电机驱动下往复转动;
25、排泄物打包子模块的工作方法为:当清洁用txt控制器预设的打包时间到,则启动清洁用编码电机带动清洁用蜗轮蜗杆传动,将清洁用丝杆卡爪转至清洁用垃圾起落装置正上方;此时,清洁用第六电机通电带动清洁用第二丝杆,其组成的连杆起落机构将垃圾袋运送至最高处,即运至清洁用丝杆卡爪的抓取位,接着清洁第五电机启动收紧卡爪抓住垃圾袋,再由涡轮蜗杆传动使清洁用丝杆卡爪转动,将垃圾袋带出清洁用装置机架,供用户丢弃。
26、所述智能陪玩监控小车模块的拼接方法为:在慧鱼创意组合模型中选取拼装积木式零件,选取的拼装积木式零件包括:陪玩用小灯泡(c1)、陪玩用光电传感器(c2)、陪玩用编码电机(c4)、陪玩用摄像头(c5)、陪玩用txt控制器(c6)、陪玩用电机(c7);
27、在小车底盘上将陪玩用电机与连杆机构相拼接并固定,形成陪玩用击球连杆机构(c3);在小车底盘两侧的车轮处拼接一对陪玩用编码电机用于驱动小车移动;在小车底盘处固定陪玩用摄像头、陪玩用光电传感器,并使其与小车处的陪玩用txt控制器相连;
28、陪玩用编码电机还经弹簧绳与陪玩小球相连;
29、智能陪玩监控小车模块的使用方法为:使用者将猫最活跃的时间段设为陪玩用txt控制器的陪玩时间段,当时间到时,编码电机通电,通过陪玩用txt控制器控制两个编码电机的速度,实现小车前进、后退、左转、右转和停止;陪玩用摄像头通过视觉检测自动寻找配套陪玩小球,若找到则靠近小球,否则继续寻找;当小球进入击球区,遮挡陪玩用小灯泡送向陪玩用光电传感器的灯光时,陪玩用电机带动连杆机构将小球击出,发出声音吸引猫追逐与抓捕。此外,小车还可通过wifi与电脑连接,实时查看宠物动向。
30、所述陪玩用txt控制器经wifi通信链路与外部电脑相连,使用者能经外部电脑实时查看猫的动态。
31、本发明以智能性、全面性、便利性和互动性四大设计原则为基础,设计出一站式猫类养护系统。该系统基于慧鱼创意组合模型设计开发,包含智能喂食模块、智能猫砂盆清洁模块和智能陪玩监控小车模块,很好地满足了猫类养护的日常需求,其优点在于:
32、1、本发明的智能化、自动化程度更高,使用户得到完全的解放,为其自由出行提供了便利条件,解决了养猫者差旅不便的问题。
33、2、本发明的集成度更高,功能更全面,将一站式解决养猫难题,同时市场上尚未出现相同产品或专利,具有极大市场潜力。
34、由于本发明基于慧鱼模型的积木式机电部件,以插接拼接方式进行制造,因此使用者可以按本发明所述方法自行制造符合需要的猫类养护设施,而且可以根据猫的生长情况、饲养猫只数量的增减来灵活定制及改造,例如当猫小时,可组建微型的养护设备以节省空间占用,而当小猫长大,则可以自行更改养护设施的尺寸来适配猫的体型,这种定制化功能对于部分特定易发胖的猫品种来说,更为实用;再例如可以根据所饲养不同猫的不同口味,把多个喂食用挡板拼接在不同的猫粮储器的输出口,按不同猫的不同进食时间,有针对性的投放对应口味的猫粮;再例如在增加养猫只数后,无须另行购买或搭建设备,可直接通过在原有设施上插接部件,来同时为多只猫喂食或提供排泄场地。
- 还没有人留言评论。精彩留言会获得点赞!