一种自平衡式高效节能的农作物收获装置及其工作过程
本发明属于农作物收获,具体涉及一种自平衡式高效节能的农作物收获装置及其工作过程。
背景技术:
1、在漫长的农业技术发展过程中,叶菜类农作物的种植和收割一直依赖于人力劳动,并且缺少对垄高、株距、行距均具有较好适应性的新型高效装备的研发。特别是在一些丘陵山区,地形较为复杂,户均经营规模小,且地块零散,无论从成本控制还是从地形地势来说,都不适合大规模的传统机械化装备收割。因此小规模收割机械化的市场非常庞大,亟需一种适合复杂地形和小规模下的高效机械化收割装置,从而提高生产效率、降低生产成本,促进叶菜类蔬菜产业的健康发展。
2、公开号为cn201523552u的专利公开了一种以联体阶梯机架为基础机座,配装在小型手扶拖拉机上的韭菜花收割机,其机身兼顾视野长短、转动灵活、结构简单、安全性能强,最大限度避免事故的发生。但是其运动的实现需要借助于于小型拖拉机的带动,无法实现自主独立运动以及自适应。
3、公开号为cn114651604a的专利公开了一种带有除杂装置的榨菜收割机,解决现有技术中的榨菜收割机在收割后的青菜头上留有较多茎叶的问题。然而该装置忽略了在青菜收获的过程中在靠近根部的茎秆会留有部分泥土的问题。
4、公开号为cn215073980u的专利公开了一种旋转上撂式小青菜收割机,可以实现高效、独立的运动,但是其机身结构固定,高度无法调节,无法适应不同田垄的高度。
5、因此,现有的小型农作物收割机不足以实现简洁,高效,自适应的农作物收割。首先,由于农作物的形态各异,部分装置固定的收割方式无法精准敏捷的收割不同的农作物;其次,由于农作物的环境适应力较强,其田垄范围有大有小,田垄高度有高有低,随机性较强,部分装置固定的机身无法实现升降以适应不同田垄的高度。
技术实现思路
1、针对现有技术中存在的上述问题,本发明的目的在于提供一种自平衡式高效节能的农作物收获装置及其工作过程。
2、本发明提供如下技术方案:
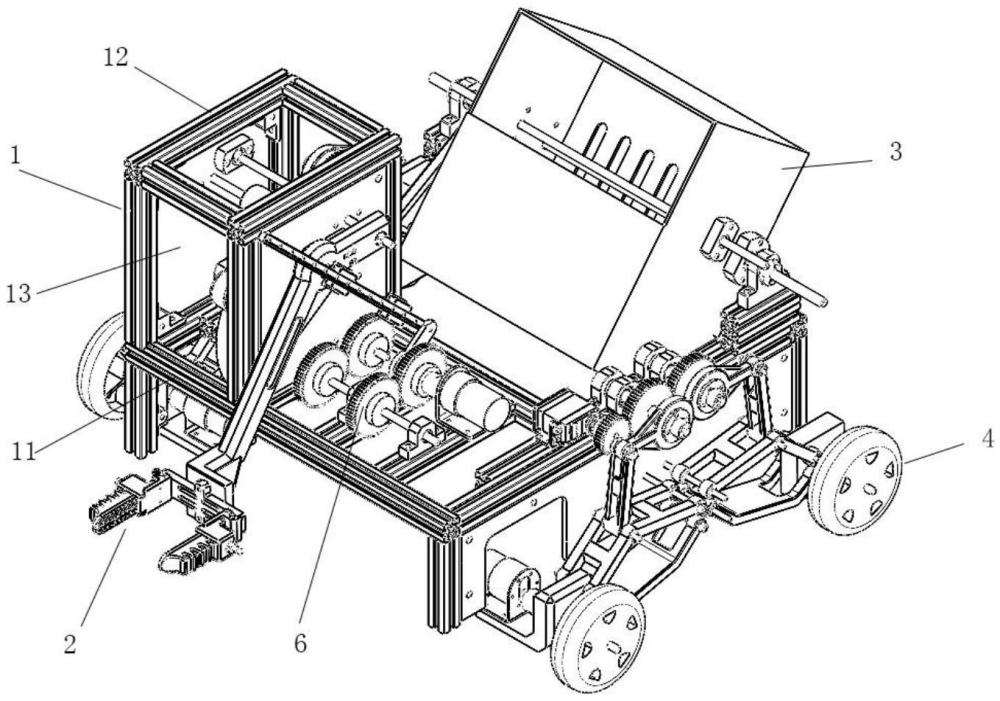
3、一种自平衡式高效节能的农作物收获装置,包括主体框架,所述主体框架上设有用于抓取农作物的抓取机构及用于放置农作物并对农作物进行筛土的筛土机构,筛土机构可摆动设置在主体框架上,且与抓取机构联动运动;所述主体框架的两侧均设有行走机构,两侧的行走机构能够分别实现独立行走及升降运动。
4、进一步的,所述抓取机构包括抓取驱动件及机械臂,抓取驱动件的输出端通过曲柄摇杆机构与机械臂相连接,机械臂活动设置在主体框架上,其上设有柔性夹爪。
5、进一步的,所述抓取驱动件通过第一齿轮传动组件、凸轮机构与筛土机构相连接;所述凸轮结构包括共轭凸轮机构、从动件及摆动臂,抓取驱动件的输出端与共轭凸轮机构之间通过第一齿轮传动组件传动连接,共轭凸轮机构与从动件之间配合设置,从动件通过摆动臂与筛土机构相连接;所述筛土机构包括箱体,箱体的一侧开设有入口,箱体的侧部及底部开设有一组筛槽。
6、进一步的,所述共轭凸轮机构活动设置在主体框架上,从动件的一侧与共轭凸轮机构配合设置,其中部与主体框架活动连接,另一侧与摆动臂的一端铰接连接,摆动臂的另一端铰接设置在箱体上。
7、进一步的,所述共轭凸轮机构中的两个凸轮在驱动机构的驱动下移动至休止圆时,柔性夹爪运动至箱体上入口的正上方,以保证在静止状态下将抓取的农作物放入箱体中。
8、进一步的,两侧的行走机构通过外部控制系统实现自平衡控制,行走机构包括升降驱动件及前后设置的两个行走轮机构,升降驱动件经由第二齿轮传动组件传动驱动两个行走轮机构同步升降;所述行走轮机构包括行走轮,所述行走轮依次通过稳定连杆机构、升降连杆机构与第二齿轮传动组件相连接,且至少一个行走轮上设置有行走驱动件。
9、进一步的,所述行走轮机构还包括车轮安装座,行走轮活动安装在车轮安装座上;所述稳定连杆机构包括上连杆及下连杆,上、下连杆的一端分别与主体框架活动连接,另一端分别与车轮安装座活动连接,四个活动连接副组合形成平行四边形连杆结构;所述升降连杆机构包括第一连杆及第二连杆,第一连杆的一端与第二齿轮传动组件传动连接,另一端与第二连杆相连接,第二连杆的另一端与上连杆活动连接。
10、进一步的,还包括能源回收结构,其包括随动器及棘轮传动机构,随动器与棘轮传动机构之间通过齿轮传动机构传动连接,随动器与抓取机构固定连接,棘轮传动机构与外部发电机的转子相连接。
11、一种自平衡式高效节能的农作物收获装置的工作过程,包括以下步骤:
12、s1、将收获装置放置到田垄中时,通过外部自平衡控制系统,独立控制两侧行走机构中的升降驱动件,经由第二齿轮传动组件、稳定连杆机构及升降连杆机构带动行走轮升降至所需的高度,以适应田垄中不同高度的地形;然后,启动行走驱动件,控制行走轮带动整个装置前进至需要抓取农作物的位置;
13、s2、控制柔性抓夹上的抓夹动力件,使柔性抓夹处于张开的状态并保持;控制抓取驱动件运行,驱动曲柄摇杆机构带动机械臂向下移动至抓取位置;此时,与抓取驱动件相连的凸轮机构联动转动,带动筛土机构中的箱体倾倒;再通过控制抓夹动力件进行农作物的抓取,并保持柔性夹爪的抓夹姿势不变;
14、s3、利用曲柄摇杆机构的急回特性,机械臂向后方抬起,筛土机构与其联动,箱体回归水平状态,而此时抓夹的农作物正好处于箱体上入口的上方,且凸轮机构中共轭凸轮机构的两个凸轮均进入休止圆,控制抓夹动力件,松开柔性夹爪,农作物落入箱体内;同时能源回收结构对曲柄摇杆机构的急回复位运动进行能量转化;
15、s4、在下一次抓取时,凸轮机构与抓取机构联动,带动箱体摇晃实现筛土,循环往复完成所有农作物的收获。
16、进一步的,所述能源回收结构(7)对曲柄摇杆机构(23)的急回复位运动进行能量转化的具体过程如下:
17、曲柄摇杆机构(23)在急回特性的驱使下快速回位时,带动随动器(701)驱动齿轮传动机构经过一级加速,驱动棘轮棘爪机构(702)中的棘爪钩住棘轮带动棘轮旋转,棘轮带动发电机转子旋转进行发电;当抓抓取机构(2)工作时,棘爪反方向运动与棘轮不发生力的作用,不会阻碍抓取机构(2)的正常工作。
18、通过采用上述技术,与现有技术相比,本发明的有益效果如下:
19、1)本发明装置的行走机构通过连杆机构实现升降,可以适应不同高度的田垄;通过两侧独立的自平衡升降控制,能够借助已经收割完的田垄和旁边的地形适应不同宽度的田垄,提高装置的适应性;
20、2)本发明装置的抓取机构采用曲柄滑块机构配合机械臂的结构设计,利用曲柄滑块机构的急回特性使机械臂高效回位,提高了机械臂的工作效率,提高了操作连贯性;
21、3)本发明使用单一动力源控制抓取机构及筛土机构的联动运动,通过对传动与时序的设计,使得整体结构更加紧凑,能源利用率更高,控制更加精确;
22、4)本发明中,通过设置的凸轮机构,基于共轭凸轮机构的设计,能够在控制抓取机构移动的过程中,使得筛土机构中的箱体联动摇晃实现筛土;且当共轭凸轮机构中的两个凸轮运动进入休止圆时,抓取农作物后柔性夹爪的位置刚好与箱体的入口对应,能够在机构相对静止的状态下将农作物放置到箱体中,实现准确收集;
23、5)本发明中,通过设置的能量回收机构,配合曲柄滑块的急回运动,能够将急回时的动能转化为棘轮的转动运动,从而带动发电机转子旋转进行发电,实现了能量的充分回收。
- 还没有人留言评论。精彩留言会获得点赞!