一种滚刀交错橘子去皮机
1.本实用新型涉及自动化技术领域,涉及农产品加工领域,更具体的说,尤其涉及一种滚刀交错橘子去皮机。
背景技术:
2.柑橘的产量很大,而且柑橘又不易保存,因此,需要对多余柑橘进行罐装处理。而传统的柑橘剥皮大多数还是采用的人工剥皮,但传统的人工剥皮效率低,成本高。
3.针对现有的技术问题,需要一种操作简单、快捷的柑橘去皮装置,用以解决现在在柑橘剥皮市场存在的问题。
技术实现要素:
4.本实用新型的目的在于解决现有的对橘子进行去皮需要人工或者去皮不够完全的问题,提出了一种滚刀交错橘子去皮机,可以完全自动的、高效的对放入的橘子进行去皮。
5.本实用新型通过以下技术方案来实现上述目的:一种滚刀交错橘子去皮机,包括橘子总支撑架、橘子输送机构、橘子承载机构、橘子入料机构、橘子切皮机构、橘子分皮机构、橘子推进机构、橘子出料机构、橘皮收集盒和橘肉收集盒;所述橘子输送机构水平安装在所述橘子总支撑架上,橘子承载机构设置在橘子输送机构上;所述橘子总支撑架上沿着橘子承载机构的运动方向依次设置有入料工位、切皮工位、分皮工位和皮肉分离工位,橘子承载机构在橘子输送机构的驱动下依次经过入料工位、切皮工位、分皮工位和皮肉分离工位;所述橘子入料机构横跨整个入料工位的上方并固定在橘子总支撑架上,所述橘子切皮机构横跨整个切皮工位上方并固定在橘子总支撑架上,所述橘子分皮机构横跨整个分皮工位上方并固定在橘子总支撑架上,所述橘子推进机构和橘子出料机构分别设置在皮肉分离工位两侧的橘子总支撑架上;所述橘皮收集盒设置在橘子分皮机构和橘子推进机构正下方的橘子总支撑架上,橘肉收集盒设置在橘皮收集盒下方的橘子总支撑架上且橘肉收集盒的入口连接橘子出料机构的出口;
6.所述橘子承载机构为带有橘子定位孔的承载台;
7.所述橘子输送机构包括导轨第一气缸、导轨第一推板、导轨轨道、导轨第二气缸和导轨第二推板,所述导轨轨道通过两圈口字型的入料挡板围成回形导轨槽,回形导轨槽的入口端和出口端沿着纵向依次放置六个橘子承载机构,回形导轨槽的上下两条边为宽度与夹具机构宽度相同的横向单通槽,导轨第一气缸固定在导轨轨道上且导轨第一气缸的输出端连接导轨第一推板,导轨第一气缸工作时通过导轨第一推板推动橘子承载机构沿着回形导轨槽的上下两条横向单通槽移动;所述导轨第二气缸固定在导轨轨道上且导轨第二气缸的输出端连接导轨第二推板,导轨第二气缸工作时通过导轨第二推板推动橘子承载机构在回形导轨槽的入口端和出口端沿着纵向运动;
8.所述橘子入料机构包括橘子进料支撑架、橘子进料红外线传感器、橘子进料导管、
橘子进料电机、橘子进料三角挡板和橘子进料支撑轴,所述橘子进料支撑架固定连接在橘子总支撑架上,橘子进料导管竖直安装在所述橘子进料支撑架上且橘子进料导管设置在入料工位的正上方;所述橘子进料支撑架通过螺栓固定在橘子进料导管的侧面,橘子进料支撑架上设置有橘子进料支撑轴,所述橘子进料支撑轴中部与橘子进料三角挡板固定连接,橘子进料三角挡板设置有三根沿着周向均匀分布的橘子进料挡板,橘子进料电机固定在橘子进料支撑架上,橘子进料电机的输出轴连接橘子进料支撑轴的一端,橘子进料电机工作时通过橘子进料支撑轴驱动橘子进料三角挡板进行转动,橘子进料三角挡板的三根橘子进料挡板绕着橘子进料支撑轴旋转时依次从橘子进料导管经过实现橘子进料导管中的橘子依次进入下方的入料工位中;所述橘子进料红外线传感器固定连接在橘子进料支撑架的下方,橘子进料红外线传感器正对入料工位;
9.所述橘子切皮机构包括橘子切割第一支撑架、橘子切割旋转夹具、橘子切割第二气缸、橘子切割第二支撑架和橘子切割切刀,所述橘子切割第一支撑架整体呈龙门架状,橘子切割第一支撑架横跨切皮工位且固定在橘子总支撑架上;橘子切割第二气缸通过橘子切割第二支撑架固定在切片工位正上方的橘子切割第一支撑架上,橘子切割第二气缸竖直朝下设置,橘子切割第二气缸的输出端连接橘子切割切刀,橘子切割第二气缸工作时带动橘子切割切刀在橘子切割工位上方做上下运动;所述橘子切割旋转夹具设有左右对称的一对,两组橘子切割旋转夹具分别设置在橘子切割工位的两侧;所述橘子切割旋转夹具包括橘子切割电机、橘子切割第一气缸、橘子切割内轴、橘子切割连接架、橘子切割外轴、橘子切割电机固定架、橘子切割第一同步轮、橘子切割第二同步轮、橘子切割同步带和橘子切割吸盘,所述橘子切割第一支撑架上设置有竖直设置的第一气缸连接架,橘子切割第一气缸水平安装在第一气缸连接架上,橘子切割第一气缸的输出端连接水平设置的橘子切割连接架的一端,所述橘子切割连接架的另一端连接橘子切割外轴的一端;所述橘子切割第一支撑架上还设有两块竖直且平行于第一气缸连接架设置的外轴支撑板,橘子切割外轴外部主干通过滚珠连接在两块外轴支撑板上,所述橘子切割电机固定架固定在橘子切割外轴的外部主干中部,橘子切割电机水平固定在橘子切割电机固定架上,橘子切割电机的输出端连接橘子切割第一同步轮;所述橘子切割内轴套装在橘子切割外轴内部且橘子切割内轴和橘子切割外轴通过轴承连接,橘子切割内轴的一端与橘子切割吸盘固定连接,橘子切割内轴靠近吸盘端通过螺钉固定橘子切割第二同步轮,所述橘子切割第一同步轮和橘子切割第二同步轮通过橘子切割同步带连接;所述橘子切割第一气缸工作时驱动橘子切割连接架、橘子切割外轴、橘子切割内轴、橘子切割电机和橘子切割吸盘组成的整体水平运动,所述橘子切割电机工作时通过橘子切割第一同步轮、橘子切割同步带和橘子切割第二同步轮组成的同步带机构带动橘子切割内轴和橘子切割吸盘组成的整体转动;
10.所述橘子分皮机构包括橘子分皮气缸、橘子分皮支撑架、橘子分皮推杆、橘子分皮外导轨、橘子分皮模块、橘子分皮旋转支撑板和橘子分皮中部支撑板;橘子分皮支撑架的底部通过螺栓固定在橘子总支撑架上,橘子分皮气缸水平安装在橘子分皮支撑架上,橘子分皮支撑架的中部设置有竖直设置的橘子分皮中部支撑板,橘子分皮外导轨固定在橘子分皮中部支撑板和橘子分皮支撑架之间,橘子分皮气缸的输出端连接橘子分皮推杆的一端,橘子分皮推杆的另一端穿过橘子分皮外导轨后连接橘子分皮旋转支撑板;所述橘子分皮模块设置有两组,两组橘子分皮模块并排设置在橘子分皮旋转支撑板上;所述橘子分皮模块包
括橘子分皮第一电机、橘子分皮第二电机、橘子分皮滚轮、橘子分皮滚轮轴、橘子分皮旋转轴和橘子分皮旋转板,所述橘子分皮第一电机固定在橘子分皮旋转支撑板上,橘子分皮第一电机的输出轴连接橘子分皮旋转轴的一端,所述橘子分皮旋转轴竖直设置且橘子分皮旋转轴的上端两端通过轴承支撑在橘子分皮旋转支撑板上,所述橘子分皮旋转板固定在橘子分皮旋转轴上,所述橘子分皮第二电机固定在橘子分皮旋转板上,橘子分皮第二电机的输出端连接橘子分皮滚轮轴,橘子分皮滚轮轴的两端通过轴承连接在橘子分皮旋转板上,橘子分皮滚轮固定在橘子分皮滚轮轴上;橘子分皮气缸工作时推动橘子分皮推杆沿着橘子分皮外导轨直线运动,进而带动橘子分皮旋转支撑板和两组橘子分皮模块组成的整体直线运动;所述橘子分皮第一电机工作时通过橘子分皮旋转轴带动橘子分皮旋转板、橘子分皮第二电机、橘子分皮滚轮和橘子分皮滚轮轴组成的整体绕着橘子分皮旋转轴的轴心线转动,实现两组橘子分皮模块的橘子分皮滚轮的靠近和远离;所述橘子分皮第二电机工作时驱动橘子分皮滚轮和橘子分皮滚轮轴组成的整体绕着橘子分皮滚轮轴的轴心线转动;
11.所述橘子推进机构包括橘子推进气缸、橘子推进支撑架、橘子推进推杆、橘子推进中部支撑板、橘子推进外导轨和橘子推进推盘;橘子推进支撑架固定在橘子总支撑架上,橘子推进气缸水平安装在橘子推进支撑架的一侧;所述橘子推进气缸的输出端连接橘子推进推杆的一端,橘子推进中部支撑板固定在橘子推进支撑架上,橘子推进外导轨固定在橘子推进中部支撑板和橘子推进支撑架之间,橘子推进推杆穿过橘子推进外导轨后连接橘子推进推盘;
12.所述橘子出料机构包括橘子导向导管支撑架和橘子导向导管,所述橘子导向导管支撑架底端通过螺栓固定连接在橘子总支撑架上,橘子导向导管固定安装在橘子导向导管支撑架的上端;所述橘子导向导管整体呈弧形管设置,橘子导向导管的入口口径大于橘子出料机构中橘子推进推盘的最大直径,橘子导向导管的入口的轴心线和橘子出料机构的橘子推进推盘的轴心线在同一条直线的,橘子出料机构的橘子推进推盘在橘子推进气缸的推动下将皮肉分离工位中的橘子推入橘子导向导管的入口中。
13.进一步的,还包括橘子转料机构,橘子转料机构设置在切皮工位正下方的橘子总支撑架上,所述橘子转料机构包括橘子转料推盘、橘子转料内轴、橘子转料第一同步轮、橘子转料同步带、橘子转料第二同步轮、橘子转料电机安装板、橘子转料电机、橘子转料电机支撑架、橘子转料支撑架、橘子转料气缸、橘子转料推杆、橘子转料第一中部支撑板、橘子转料外导轨、橘子转料第二中部支撑板,所述橘子转料支撑架固定在切皮工位正下方的橘子总支撑架上,橘子转料第一中部支撑板和橘子转料第二中部支撑板均水平固定在橘子转料支撑架上,橘子转料外导轨的两端分别固定在橘子转料第一中部支撑板和橘子转料第二中部支撑板上,橘子转料气缸固定在橘子转料支撑架上,橘子转料气缸的输出端连接橘子转料推杆的一端,橘子转料推杆的另一端穿过橘子转料外导轨后伸出到橘子转料第二中部支撑板外,所述橘子转料电机支撑架通过两块竖直设置的侧板固定在橘子转料推杆上,橘子转料电机通过橘子转料电机安装板固定在橘子转料电机支撑架,所述橘子转料电机的输出端连接橘子转料第二同步轮;橘子转料推杆的前端设置有前端通孔,所述橘子转料内轴通过轴承套装在橘子转料推杆的前端通孔内,橘子转料第一同步轮固定在橘子转料内轴上,橘子转料第一同步轮和橘子转料第二同步轮通过橘子转料同步带连接,橘子转料推盘安装在橘子转料内轴的端部,橘子转料推盘正对橘子承载机构上的橘子定位孔;橘子转料气缸
工作时通过橘子转料推杆推动橘子转料推盘、橘子转料内轴、橘子转料第一同步轮、橘子转料同步带、橘子转料第二同步轮、橘子转料电机安装板、橘子转料电机和橘子转料电机支撑架组成的整体沿着橘子转料外导轨直线运动,橘子转料电机工作时通过橘子转料第一同步轮、橘子转料同步带和橘子转料第二同步轮组成的同步带机构带动橘子转料内轴和推动橘子转料推盘组成的整体做旋转运动。
14.进一步的,所述橘子入料红外线传感器安装的位置高于橘子输送机构上的橘子承载机构放置原料的最低点低于原料的最高点。
15.进一步的,所述橘子进料三角挡板位于橘子进料导管的中下部。橘子进料三角挡板的高度保证橘子进料导管内应恰好容下一个原料,同时橘子进料三角挡板的尖端应比较平滑,橘子进料三角挡板转动时不会对橘子产生损伤。
16.进一步的,所述橘子切皮机构的两组橘子切割旋转夹具对称分布,两组橘子切割旋转夹具的中间位置为原料的中心,橘子切割旋转夹具中橘子切割外轴的形成满足两个橘子切割吸盘吸紧原料。
17.进一步的,所述橘子切割第一同步轮和橘子切割第二同步轮的前后两端面分别位于同一平面内。
18.进一步的,所述橘子切割切刀放置在原料的中心位置上方,橘子切割切刀的刀口方向与橘子切割吸盘旋转方向相反。在切料之前橘子切割切刀不与原料发生干涉。
19.进一步的,整个橘子总支撑架设置有两套橘子分皮机构,两套橘子分皮机构相邻设置。由于橘子分皮的工序是整个设备最耗时的,因此设置两套橘子分皮机构能够有效的提升整个装置的剥皮效率。
20.进一步的,所述橘子转料推盘的行程至末端时原料离开橘子承载机构的橘子定位孔。随着橘子转料推杆移动的橘子转料第一同步轮、橘子转料第二同步轮、橘子转料同步带等结构不会在运动末端与橘子总支撑架发生干涉。
21.本实用新型的控制系统包括plc控制器、十四个伺服驱动器、十四个伺服电机、十四个编码盘、十四个伸缩气缸、十四个电磁控制阀、十九个限位器;十四个伺服驱动器分别为第一伺服驱动器、第二伺服驱动器、第三伺服驱动器、第四伺服驱动器、第五伺服驱动器、第六伺服驱动器、第七伺服驱动器、第八伺服驱动器、第九伺服驱动器、第十伺服驱动器、第十一伺服驱动器、第十二伺服驱动器、第十三伺服驱动器、第十四伺服驱动器;十四个编码盘分别为第一编码盘、第二编码盘、第三编码盘、第四编码盘、第五编码盘、第六编码盘、第七编码盘、第八编码盘、第九编码盘、第十编码盘、第十一编码盘、第十二编码盘、第十三编码盘、第十四编码盘;十四个电磁控制阀分别为第一电磁控制阀、第二电磁控制阀、第三电磁控制阀、第四电磁控制阀、第五电磁控制阀、第六电磁控制阀、第七电磁控制阀、第八电磁控制阀、第九电磁控制阀、第十电磁控制阀、第十一电磁控制阀、第十二电磁控制阀、第十三电磁控制阀、第十四电磁控制阀;二十个限位器分别为第一限位器、第二限位器、第三限位器、第四限位器、第五限位器、第六限位器、第七限位器、第八限位器、第九限位器、第十限位器、第十一限位器、第十二限位器、第十三限位器、第十四限位器、第十五限位器、第十六限位器、第十七限位器、第十八限位器、第十九限位器;plc控制器的输出端与十四个伺服驱动器、十四个电磁控制阀的输入端分别连接;plc控制器的输入端与十九个限位器的输出端分别相连;所述第一伺服驱动器的输出端与橘子入料电机的信号输入端相连接;所述第一编
码盘的一端与橘子入料电机的输出端相连接,另外一端与第一伺服驱动器相连接;所述第二伺服驱动器、第三伺服驱动器、第四伺服驱动器、第五伺服驱动器的输出端分别与四个橘子切皮电机的信号输入端相连接;所述第二编码盘、第三编码盘、第四编码盘、第五编码盘的一端分别与四个橘子切皮电机的输出端相连接,另外一端分别与第二伺服驱动器、第三伺服驱动器、第四伺服驱动器、第五伺服驱动器相连接;所述第六伺服驱动器、第七伺服驱动器、第八伺服驱动器、第九伺服驱动器的输出端分别与四个橘子分皮第一电机的信号输入端相连接;所述第六编码盘、第七编码盘、第八编码盘、第九编码盘的一端分别与四个橘子分皮第一电机的输出端相连接,另外一端分别与第六伺服驱动器、第七伺服驱动器、第八伺服驱动器、第九伺服驱动器相连接;所述第十伺服驱动器、第十一伺服驱动器、第十二伺服驱动器、第十三伺服驱动器的输出端分别与四个橘子分皮第二电机的信号输入端相连接;所述第十编码盘、第十一编码盘、第十二编码盘、第十三编码盘的一端分别与四个橘子分皮第二电机的输出端相连接,另外一端分别与第十伺服驱动器、第十一伺服驱动器、第十二伺服驱动器、第十三伺服驱动器相连接;所述第十四伺服驱动器的输出端分别与橘子转料电机的信号输入端相连接;所述第十四编码盘的一端与橘子转料电机的输出端相连接,另外一端分别与第十四伺服驱动器相连接;所述第一电磁控制阀、第二电磁控制阀的输出端分别与两个橘子输送第一气缸的输入端连接;所述第三电磁控制阀、第四电磁控制阀的输出端分别与两个橘子输送第二气缸的输入端连接;所述第五电磁控制阀、第六电磁控制阀、第七电磁控制阀、第八电磁控制阀的输出端分别与四个橘子切皮第一气缸的输入端连接;所述第九电磁控制阀、第十电磁控制阀的输出端分别与两个橘子切皮第二气缸的输入端连接;所述第十一电磁控制阀、第十二电磁控制阀的输出端分别与两个橘子分皮气缸的输入端连接;所述第十三电磁控制阀的输出端与橘子推进气缸的输入端连接;所述第十四电磁控制阀的输出端与橘子转料气缸的输入端连接;所述第一限位器、第二限位器的输入端分别置于两个橘子输送第一气缸的进程末端;所述第三限位器、第四限位器的输入端分别置于两个橘子输送第二气缸的进程末端;所述第五限位器、第六限位器、第七限位器、第八限位器的输入端分别置于四个入料第一气缸的进程末端;所述第九限位器、第十限位器的输入端分别置于两个入料第二气缸的进程末端;所述第十一限位器、第十二限位器的输入端分别置于两个橘子分皮气缸的进程末端;所述第十三限位器的输入端置于橘子推进气缸的进程末端;所述第十四限位器的输入端置于橘子推进气缸的进程末端;所述第十五限位器、第十六限位器的输入端分别置于两个橘子切皮第一气缸的回程末端;所述第十七限位器的输入端置于橘子分皮气缸的回程末端;所述第十八限位器的输入端置于橘子推进气缸的回程末端;所述第十九限位器的输入端置于橘子转料气缸的回程末端。
22.所述plc控制器能够根据给定的角度值,通过算法计算得到相应各个电机的转角,进而可以得到需要给各个伺服电机输入的脉冲和脉冲频率;所述伺服驱动器接收到控制器所发出的脉冲信号,进而控制各个电机进行相应的运转;所述编码盘可以采集各个电机的转角信息,并将采集到的信息传输给伺服驱动器,伺服驱动器通过将初始信息和反馈信息进行比较,进而调整相应电机的转角和转速;所述限位器可以收集到各个气缸的位置,然后反馈信号给控制器,控制器通过接收的信号,进行下一工序,从而使各个功能达到预想的效果。
23.本实用新型的工作过程如下:当橘子入料红外线传感器检测到夹具到达橘子入料
机构下方时,反馈信号到plc控制器,控制器发出脉冲到第一伺服驱动器,第一伺服驱动器控制橘子入料电机转动一定的角度;在橘子入料红外线传感器感应到有橘子承载机构进入的同时,控制器发送指令到第五电磁控制阀、第六电磁控制阀,两电磁控制阀控制两个橘子切皮第一气缸进程直到接触第五限位器、第六限位器,两个限位器反馈信号到控制器,然后控制器发送指令到第九电磁控制阀,第九电磁控制阀控制橘子切皮第二气缸进程运动直到接触第九限位器,第九限位器反馈信号到控制器,控制器发送脉冲信号到第二伺服驱动器、第三伺服驱动器,两伺服驱动器驱动橘子切皮电机转动一定的角度,然后控制器发送指令到第五电磁控制阀、第六电磁控制阀、第九电磁控制阀分别控制橘子切皮第一气缸、橘子切皮第二气缸进行回程运动直到接触第十五限位器,该限位器反馈信号到控制器,然后控制器发送指令到第十四电磁控制阀,该电磁控制阀控制橘子转料气缸进程直到接触第十四限位器,该限位器反馈信号到控制器,控制器发送脉冲信号到第十四伺服驱动器,该伺服驱动器驱动橘子转料电机带动原料转动一定的角度,然后控制器发送指令到第十四电磁控制阀,该电磁控制阀控制橘子转料气缸回程直到接触第十九限位器,该限位器反馈信号给控制器;在橘子入料红外线传感器感应到有橘子承载机构进入的同时,控制器发送指令到第七电磁控制阀、第八电磁控制阀,两电磁控制阀控制两个橘子切皮第一气缸进程直到接触第七限位器、第八限位器,两个限位器反馈信号到控制器,然后控制器发送指令到第十电磁控制阀,第十电磁控制阀控制橘子切皮第二气缸进程运动直到接触第十限位器,第十限位器反馈信号到控制器,控制器发送脉冲信号到第四伺服驱动器、第五伺服驱动器,两伺服驱动器驱动橘子切皮电机转动一定的角度,然后控制器发送指令到第七电磁控制阀、第八电磁控制阀、第十电磁控制阀分别控制橘子切皮第一气缸、橘子切皮第二气缸进行回程运动直到接触第十六限位器,该限位器反馈信号到控制器;在橘子入料红外线传感器感应到有橘子承载机构进入的同时,控制器发送脉冲信号到第六伺服驱动器、第七伺服驱动器、第八伺服驱动器、第九伺服驱动器、第十伺服驱动器、第十一伺服驱动器、第十二伺服驱动器、第十三伺服驱动器,这些驱动器分别驱动四个橘子分皮第一电机和四个橘子分皮第二电机转动,与此同时,控制器发送指令到第十一电磁控制阀、第十二电磁控制阀,这两个电磁控制阀分别控制两个橘子分皮气缸进行进程运动直到接触到第十一限位器、第十二限位器,限位器反馈信号到控制器,然后控制器控发送指令给第十一电磁控制阀、第十二电磁控制阀,两电磁控制阀分别控制两个橘子分皮气缸进行回程运动直到接触第十七限位器,限位器反馈信号给控制器;在橘子入料红外线传感器感应到有橘子承载机构进入的同时,控制器发送指令到第十三电磁控制阀,该电磁控制阀控制橘子推进气缸进行进程运动直到接触第十三限位器,限位器反馈信号到控制器,控制器发送指令给第十三电磁控制阀,该电磁控制阀控制橘子推进气缸进行回程运动直到接触第十八限位器,限位器反馈信号到控制器;然后控制器发送指令到第一电磁控制阀、第二电磁控制阀,第一电磁控制阀控制橘子输送第一气缸进程直到接触第一限位器,第二电磁控制阀控制橘子输送第一气缸进程直到接触第二限位器,两限位器反馈信号到控制器,控制器控制第一电磁控制阀、第二电磁控制阀,两控制阀分别控制两个橘子输送第一气缸回程,然后控制器发送指令到第三电磁控制阀、第四电磁控制阀,第三电磁控制阀控制橘子输送第二气缸进程直到接触第三限位器,第四电磁控制阀控制橘子输送第二气缸进程直到接触第四限位器,两限位器反馈信号到控制器,控制器控制两个橘子输送第二气缸回程,至此一个循环周期结束。
24.本实用新型的有益效果在于:本实用新型采用多个电机和气缸做为动力源,并利用多个不同种类的传感器测量各个工序完成的进程,形成反馈,使控制器能够有序的对各个电机和气缸进行控制,从而能够完成对每个橘子的剥皮功能,并将果皮和果肉分类进行收集。本实用新型具有结构简单,设计合理,加工装配工艺良好的优点。
附图说明
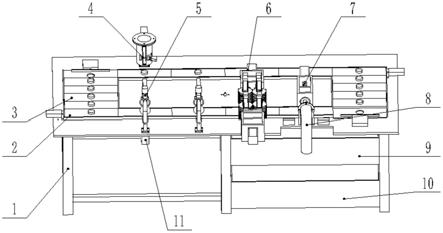
25.图1是本实用新型一种滚刀交错橘子去皮机的整体结构示意图。
26.图2是本实用新型橘子输送机构的结构示意图。
27.图3是本实用新型橘子入料机构的结构示意图。
28.图4是本实用新型橘子切皮机构的结构示意图。
29.图5是本实用新型橘子分皮机构的结构示意图。
30.图6是本实用新型橘子推进机构的结构示意图。
31.图7是本实用新型橘子出料机构的流程示意图。
32.图8是本实用新型橘子转料机构的结构示意图。
33.图中,1
‑
橘子总支撑架、2
‑
橘子输送机构、3
‑
橘子承载机构、4
‑
橘子入料机构、5
‑
橘子切皮机构、6
‑
橘子分皮机构、7
‑
橘子推进机构、8
‑
橘子出料机构、9
‑
橘皮收集盒、10
‑
橘肉收集盒、11
‑
橘子转料机构、21
‑
导轨第一气缸、22
‑
导轨第一推板、23
‑
导轨轨道、24
‑
橘导轨第二气缸、25
‑
导轨第二推板、41
‑
橘子进料支撑架、42
‑
橘子进料红外线传感器、43
‑
橘子进料导管、44
‑
橘子进料电机、45
‑
橘子进料三角挡板、46
‑
橘子进料支撑轴、51
‑
橘子切割第一支撑架、52
‑
橘子切割第一气缸、53
‑
橘子切割连接架、54
‑
橘子切割内轴、55
‑
橘子切割外轴、56
‑
橘子切割第二支撑架、57
‑
橘子切割第二气缸、58
‑
橘子切割切刀、59
‑
橘子切割吸盘、510
‑
橘子切割第一同步轮、511
‑
橘子切割第二同步轮、512
‑
橘子切割同步带、513
‑
橘子切割电机固定架、514
‑
橘子切割电机、61
‑
橘子分皮气缸、62
‑
橘子分皮支撑架、63
‑
橘子分皮推杆、64
‑
橘子分皮外导轨、65
‑
橘子分皮第一电机、66
‑
橘子分皮第二电机、67
‑
橘子分皮滚轮、68
‑
橘子分皮滚轮轴、69
‑
橘子分皮旋转轴、610
‑
橘子分皮旋转板、611
‑
橘子分皮旋转支撑板、612
‑
橘子分皮中部支撑板、71
‑
橘子推进气缸、72
‑
橘子推进支撑架、73
‑
橘子推进推杆、74
‑
橘子推进中部支撑板、75
‑
橘子推进外导轨、76
‑
橘子推进推盘、81
‑
橘子出料导管支撑架、82
‑
橘子导向导管、111
‑
橘子转料推盘、112
‑
橘子转料内轴、113
‑
橘子转料第一同步轮、114
‑
橘子转料同步带、115
‑
橘子转料第二同步轮、116
‑
橘子转料电机安装板、117
‑
橘子转料电机、118
‑
橘子转料电机支撑架、119
‑
橘子转料支撑架、1110
‑
橘子转料气缸、1111
‑
橘子转料推杆、1112
‑
橘子转料第一中部支撑板、1113
‑
橘子转料外导轨、1114
‑
橘子转料第二中部支撑板。
具体实施方式
34.下面结合附图对本实用新型作进一步说明:
35.如图1~7所示,一种滚刀交错橘子去皮机,包括橘子总支撑架1、橘子输送机构2、橘子承载机构3、橘子入料机构4、橘子切皮机构5、橘子分皮机构6、橘子推进机构7、橘子出料机构8、橘皮收集盒9和橘肉收集盒10;所述橘子输送机构2水平安装在所述橘子总支撑架1上,橘子承载机构3设置在橘子输送机构2上;所述橘子总支撑架1上沿着橘子承载机构3的
运动方向依次设置有入料工位、切皮工位、分皮工位和皮肉分离工位,橘子承载机构3在橘子输送机构2的驱动下依次经过入料工位、切皮工位、分皮工位和皮肉分离工位;所述橘子入料机构4横跨整个入料工位的上方并固定在橘子总支撑架1上,所述橘子切皮机构5横跨整个切皮工位上方并固定在橘子总支撑架1上,所述橘子分皮机构6横跨整个分皮工位上方并固定在橘子总支撑架1上,所述橘子推进机构7和橘子出料机构8分别设置在皮肉分离工位两侧的橘子总支撑架1上;所述橘皮收集盒9设置在橘子分皮机构6和橘子推进机构7正下方的橘子总支撑架1上,橘肉收集盒10设置在橘皮收集盒9下方的橘子总支撑架1上且橘肉收集盒10的入口连接橘子出料机构8的出口;
36.所述橘子承载机构3为带有橘子定位孔的承载台。
37.所述橘子输送机构2包括导轨第一气缸21、导轨第一推板22、导轨轨道23、导轨第二气缸24和导轨第二推板25,所述导轨轨道23通过两圈口字型的入料挡板围成回形导轨槽,回形导轨槽的入口端和出口端沿着纵向依次放置六个橘子承载机构3,回形导轨槽的上下两条边为宽度与夹具机构宽度相同的横向单通槽,导轨第一气缸21固定在导轨轨道23上且导轨第一气缸21的输出端连接导轨第一推板22,导轨第一气缸21工作时通过导轨第一推板22推动橘子承载机构3沿着回形导轨槽的上下两条横向单通槽移动;所述导轨第二气缸24固定在导轨轨道23上且导轨第二气缸24的输出端连接导轨第二推板25,导轨第二气缸24工作时通过导轨第二推板25推动橘子承载机构3在回形导轨槽的入口端和出口端沿着纵向运动。
38.所述橘子入料机构4包括橘子进料支撑架41、橘子进料红外线传感器42、橘子进料导管43、橘子进料电机44、橘子进料三角挡板45和橘子进料支撑轴46,所述橘子进料支撑架41固定连接在橘子总支撑架1上,橘子进料导管43竖直安装在所述橘子进料支撑架41上且橘子进料导管43设置在入料工位的正上方;所述橘子进料支撑架41通过螺栓固定在橘子进料导管43的侧面,橘子进料支撑架41上设置有橘子进料支撑轴46,所述橘子进料支撑轴46中部与橘子进料三角挡板45固定连接,橘子进料三角挡板45设置有三根沿着周向均匀分布的橘子进料挡板,橘子进料电机44固定在橘子进料支撑架41上,橘子进料电机44的输出轴连接橘子进料支撑轴46的一端,橘子进料电机44工作时通过橘子进料支撑轴46驱动橘子进料三角挡板45进行转动,橘子进料三角挡板45的三根橘子进料挡板绕着橘子进料支撑轴46旋转时依次从橘子进料导管43经过实现橘子进料导管43中的橘子依次进入下方的入料工位中;所述橘子进料红外线传感器42固定连接在橘子进料支撑架41的下方,橘子进料红外线传感器42正对入料工位。
39.所述橘子切皮机构5包括橘子切割第一支撑架51、橘子切割旋转夹具、橘子切割第二气缸57、橘子切割第二支撑架56和橘子切割切刀58,所述橘子切割第一支撑架51整体呈龙门架状,橘子切割第一支撑架51横跨切皮工位且固定在橘子总支撑架1上;橘子切割第二气缸57通过橘子切割第二支撑架56固定在切片工位正上方的橘子切割第一支撑架51上,橘子切割第二气缸57竖直朝下设置,橘子切割第二气缸57的输出端连接橘子切割切刀58,橘子切割第二气缸57工作时带动橘子切割切刀58在橘子切割工位上方做上下运动;所述橘子切割旋转夹具设有左右对称的一对,两组橘子切割旋转夹具分别设置在橘子切割工位的两侧;所述橘子切割旋转夹具包括橘子切割电机515、橘子切割第一气缸52、橘子切割内轴54、橘子切割连接架53、橘子切割外轴55、橘子切割电机固定架514、橘子切割第一同步轮510、
橘子切割第二同步轮511、橘子切割同步带513和橘子切割吸盘59,所述橘子切割第一支撑架51上设置有竖直设置的第一气缸连接架,橘子切割第一气缸52水平安装在第一气缸连接架上,橘子切割第一气缸52的输出端连接水平设置的橘子切割连接架53的一端,所述橘子切割连接架53的另一端连接橘子切割外轴55的一端;所述橘子切割第一支撑架51上还设有两块竖直且平行于第一气缸连接架设置的外轴支撑板,橘子切割外轴55外部主干通过滚珠连接在两块外轴支撑板上,所述橘子切割电机固定架514固定在橘子切割外轴55的外部主干中部,橘子切割电机515水平固定在橘子切割电机固定架514上,橘子切割电机515的输出端连接橘子切割第一同步轮510;所述橘子切割内轴54套装在橘子切割外轴55内部且橘子切割内轴54和橘子切割外轴55通过轴承连接,橘子切割内轴54的一端与橘子切割吸盘59固定连接,橘子切割内轴54靠近吸盘端通过螺钉固定橘子切割第二同步轮511,所述橘子切割第一同步轮510和橘子切割第二同步轮511通过橘子切割同步带513连接;所述橘子切割第一气缸52工作时驱动橘子切割连接架53、橘子切割外轴55、橘子切割内轴54、橘子切割电机515和橘子切割吸盘59组成的整体水平运动,所述橘子切割电机515工作时通过橘子切割第一同步轮510、橘子切割同步带513和橘子切割第二同步轮511组成的同步带机构带动橘子切割内轴54和橘子切割吸盘59组成的整体转动。
40.所述橘子分皮机构6包括橘子分皮气缸61、橘子分皮支撑架62、橘子分皮推杆63、橘子分皮外导轨64、橘子分皮模块、橘子分皮旋转支撑板611和橘子分皮中部支撑板612;橘子分皮支撑架62的底部通过螺栓固定在橘子总支撑架1上,橘子分皮气缸61水平安装在橘子分皮支撑架62上,橘子分皮支撑架62的中部设置有竖直设置的橘子分皮中部支撑板612,橘子分皮外导轨64固定在橘子分皮中部支撑板612和橘子分皮支撑架62之间,橘子分皮气缸61的输出端连接橘子分皮推杆63的一端,橘子分皮推杆63的另一端穿过橘子分皮外导轨64后连接橘子分皮旋转支撑板611;所述橘子分皮模块设置有两组,两组橘子分皮模块并排设置在橘子分皮旋转支撑板611上;所述橘子分皮模块包括橘子分皮第一电机65、橘子分皮第二电机66、橘子分皮滚轮67、橘子分皮滚轮轴68、橘子分皮旋转轴69和橘子分皮旋转板610,所述橘子分皮第一电机65固定在橘子分皮旋转支撑板611上,橘子分皮第一电机65的输出轴连接橘子分皮旋转轴69的一端,所述橘子分皮旋转轴69竖直设置且橘子分皮旋转轴69的上端两端通过轴承支撑在橘子分皮旋转支撑板611上,所述橘子分皮旋转板610固定在橘子分皮旋转轴69上,所述橘子分皮第二电机66固定在橘子分皮旋转板610上,橘子分皮第二电机66的输出端连接橘子分皮滚轮轴68,橘子分皮滚轮轴68的两端通过轴承连接在橘子分皮旋转板610上,橘子分皮滚轮67固定在橘子分皮滚轮轴68上;橘子分皮气缸61工作时推动橘子分皮推杆63沿着橘子分皮外导轨64直线运动,进而带动橘子分皮旋转支撑板611和两组橘子分皮模块组成的整体直线运动;所述橘子分皮第一电机65工作时通过橘子分皮旋转轴69带动橘子分皮旋转板610、橘子分皮第二电机66、橘子分皮滚轮67和橘子分皮滚轮轴68组成的整体绕着橘子分皮旋转轴69的轴心线转动,实现两组橘子分皮模块的橘子分皮滚轮67的靠近和远离;所述橘子分皮第二电机66工作时驱动橘子分皮滚轮67和橘子分皮滚轮轴68组成的整体绕着橘子分皮滚轮轴68的轴心线转动。
41.所述橘子推进机构7包括橘子推进气缸71、橘子推进支撑架72、橘子推进推杆73、橘子推进中部支撑板74、橘子推进外导轨75和橘子推进推盘76;橘子推进支撑架72固定在橘子总支撑架1上,橘子推进气缸71水平安装在橘子推进支撑架72的一侧;所述橘子推进气
缸71的输出端连接橘子推进推杆73的一端,橘子推进中部支撑板74固定在橘子推进支撑架72上,橘子推进外导轨75固定在橘子推进中部支撑板74和橘子推进支撑架72之间,橘子推进推杆73穿过橘子推进外导轨75后连接橘子推进推盘76。
42.所述橘子出料机构8包括橘子导向导管82支撑架81和橘子导向导管82,所述橘子导向导管82支撑架81底端通过螺栓固定连接在橘子总支撑架1上,橘子导向导管82固定安装在橘子导向导管82支撑架81的上端;所述橘子导向导管82整体呈弧形管设置,橘子导向导管82的入口口径大于橘子出料机构8中橘子推进推盘76的最大直径,橘子导向导管82的入口的轴心线和橘子出料机构8的橘子推进推盘76的轴心线在同一条直线的,橘子出料机构8的橘子推进推盘76在橘子推进气缸71的推动下将皮肉分离工位中的橘子推入橘子导向导管82的入口中。
43.本实用新型还包括橘子转料机构,橘子转料机构设置在切皮工位正下方的橘子总支撑架1上,所述橘子转料机构包括橘子转料推盘111、橘子转料内轴112、橘子转料第一同步轮113、橘子转料同步带114、橘子转料第二同步轮115、橘子转料电机安装板116、橘子转料电机117、橘子转料电机支撑架118、橘子转料支撑架119、橘子转料气缸1110、橘子转料推杆1111、橘子转料第一中部支撑板1112、橘子转料外导轨1113、橘子转料第二中部支撑板1114,所述橘子转料支撑架119固定在切皮工位正下方的橘子总支撑架1上,橘子转料第一中部支撑板1112和橘子转料第二中部支撑板1114均水平固定在橘子转料支撑架119上,橘子转料外导轨1113的两端分别固定在橘子转料第一中部支撑板1112和橘子转料第二中部支撑板1114上,橘子转料气缸1110固定在橘子转料支撑架119上,橘子转料气缸1110的输出端连接橘子转料推杆1111的一端,橘子转料推杆1111的另一端穿过橘子转料外导轨1113后伸出到橘子转料第二中部支撑板1114外,所述橘子转料电机支撑架118通过两块竖直设置的侧板固定在橘子转料推杆1111上,橘子转料电机117通过橘子转料电机安装板116固定在橘子转料电机支撑架118,所述橘子转料电机117的输出端连接橘子转料第二同步轮115;橘子转料推杆1111的前端设置有前端通孔,所述橘子转料内轴112通过轴承套装在橘子转料推杆1111的前端通孔内,橘子转料第一同步轮113固定在橘子转料内轴112上,橘子转料第一同步轮113和橘子转料第二同步轮115通过橘子转料同步带114连接,橘子转料推盘111安装在橘子转料内轴112的端部,橘子转料推盘111正对橘子承载机构3上的橘子定位孔;橘子转料气缸1110工作时通过橘子转料推杆1111推动橘子转料推盘111、橘子转料内轴112、橘子转料第一同步轮113、橘子转料同步带114、橘子转料第二同步轮115、橘子转料电机安装板116、橘子转料电机117和橘子转料电机支撑架118组成的整体沿着橘子转料外导轨1113直线运动,橘子转料电机117工作时通过橘子转料第一同步轮113、橘子转料同步带114和橘子转料第二同步轮115组成的同步带机构带动橘子转料内轴112和推动橘子转料推盘111组成的整体做旋转运动。
44.所述橘子入料红外线传感器安装的位置高于橘子输送机构2上的橘子承载机构3放置原料的最低点低于原料的最高点。
45.所述橘子进料三角挡板45位于橘子进料导管43的中下部。
46.所述橘子切皮机构5的两组橘子切割旋转夹具对称分布,两组橘子切割旋转夹具的中间位置为原料的中心,橘子切割旋转夹具中橘子切割外轴55的形成满足两个橘子切割吸盘59吸紧原料。
47.所述橘子切割第一同步轮510和橘子切割第二同步轮511的前后两端面分别位于同一平面内。
48.所述橘子切割切刀58放置在原料的中心位置上方,橘子切割切刀58的刀口方向与橘子切割吸盘59旋转方向相反。
49.整个橘子总支撑架1设置有两套橘子分皮机构6,两套橘子分皮机构6相邻设置。
50.所述橘子转料推盘111的行程至末端时原料离开橘子承载机构3的橘子定位孔。
51.上述实施例只是本实用新型的较佳实施例,并不是对本实用新型技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本实用新型专利的权利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1