一种自动剥虾装置的制作方法
一种自动剥虾装置
【技术领域】
1.本发明涉及剥虾设备技术领域,尤其涉及一种自动剥虾装置。
背景技术:
2.虾仁具有营养丰富、蛋白质含量高、肉质松软、易消化等多种优点,是一道美味的食材。中国是最大的虾产品生产国和主要贸易国,随着生活水平的提高,国内对虾的需求量也在不断增加,但剥虾是一个十分繁琐的步骤,费时费力且难操作,同时虾头部分的虾刺对人的手部可能会造成一定损伤,而国内仍以手工剥虾为主,且质量参差不齐,因此设计该自动或半自动的剥虾机,为人们的生活提供便利。
技术实现要素:
3.针对上述技术的不足,本发明专利的目的是提供一种自动剥虾装置,实现机械化、自动化操作,提高剥虾效率。
4.为实现上述目的,本发明提供如下技术方案:一种自动剥虾装置,包括支撑台、设于所述支撑台上并用于放置小龙虾的工作台、固定于所述支撑台前端并用于带动所述工作台在所述支撑台上做往复运动的传动装置、以及沿所述传动装置的传动方向由近及远依次设于所述支撑台上的第一龙门架、第二龙门架、第三龙门架和第四龙门架;所述第一龙门架、第二龙门架、第三龙门架和第四龙门架上依次分别固定有虾头去除装置、虾身分片装置、虾仁分离装置以及虾壳清理装置;所述第二龙门架、第三龙门架和第四龙门架的底端均设有用于带动相应龙门架上下运动的升降气缸。
5.优选地,所述工作台上设有一对用于加持、固定虾身的虾身夹片,所述的一对虾身夹片相对设置,且虾身夹片之间形成虾身夹槽,所述虾身夹片的内侧上设有防滑纹路;所述虾身夹片一端的中部均开设有长条状缺口。
6.优选地,所述传动装置包括水平固定在所述支撑台上的多位标准气缸,所述多位标准气缸的活塞杆与所述工作台固定连接,所述多位标准气缸的两端还分别固定有用于加固所述多位标准气缸的气缸安装板和气缸固定板,所述气缸安装板和气缸固定板均固定于所述支撑台上。
7.优选地,所述支撑台上沿所述传动装置的传动方向固定有导轨,所述工作台的底端开设有与所述导轨相适配的导轨槽,所述工作台通过所述导轨槽与所述导轨滑动连接。
8.优选地,所述虾头去除装置包括虾头夹具、带动所述虾头夹具在水平方向上做往复运动的第一气缸,所述第一气缸固定在所述第一龙门架的一侧,所述虾头夹具固定在所述第一气缸的活塞杆上。所述虾身夹片靠近所述虾头夹具一端的内侧开设有豁槽,以方便虾头夹具伸入到虾身夹槽中。
9.优选地,所述虾头夹具为具有自动加持功能的机械手。
10.优选地,所述虾身分片装置包括切割装置和翻转装置;所述切割装置包括水平设置的切割刀片、带动所述切割刀片在水平方向上做往复运动的第二气缸,所述第二气缸固
定在所述第二龙门架的一侧,所述切割刀片固定在所述第二气缸的活塞杆上;所述翻转装置包括固定在所述第二龙门架上端的旋转气缸,所述旋转气缸的活塞杆上固定连接有旋转吊钩。
11.优选地,所述虾仁分离装置包括沿所述第三龙门架顶端设置的第一横向导轨,分别滑动连接在所述第一横向导轨上的左滑块和右滑块,所述左滑块和右滑块上分别固定有竖直向下的左连接杆和右连接杆,所述左连接杆和右连接杆下端分别固定有左分离片和右分离片;所述第三龙门架顶端的左右两侧分别水平固定有用于带动所述左滑块做往复运动的第三气缸和用于带动所述右滑块做往复运动的第四气缸。
12.优选地,所述虾壳清理装置包括沿所述第四龙门架顶端设置的第二横向导轨,滑动连接在所述第二横向导轨上的运动滑块,所述运动滑块上固定有竖直向下的清扫连接杆,所述清扫连接杆的下端固定有清扫毛刷,所述第四龙门架的顶端水平固定有用于带动所述运动滑块沿所述第二横向导轨做往复运动的第五气缸。
13.本发明至少有以下有益效果:本发明提供的自动剥虾装置,其根据剥虾操作流程设置,能实现虾头的去除、虾仁与虾壳的分离。使用本装置可以取代人工剥虾工作,实现剥虾过程的机械化、自动化,从而提高剥虾的工作效率,节约人力成本。该装置结构简单、设计巧妙,可以运用简单的机构通过plc控制,完成剥虾工作,极大地降低了剥虾成本。
【附图说明】
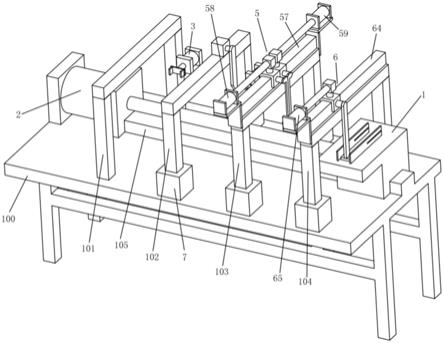
14.图1是剥虾装置的整体结构示意图;
15.图2是传动装置与工作台的结构示意图;
16.图3是工作台的结构示意图;
17.图4是虾头去除装置在第一龙门架上的结构示意图;
18.图5是虾身分片装置的部分结构示意图;
19.图6是虾仁分离装置的部分结构示意图;
20.图7是虾壳清理装置的部分结构示意图。
21.标注说明:1
‑
工作台,11
‑
虾身夹片,111
‑
长条状缺口,112
‑
豁槽,12
‑
虾身夹槽,13
‑
导轨槽,2
‑
传动装置,21
‑
多位标准气缸,22
‑
活塞杆,23
‑
气缸安装板,24
‑
气缸固定板,3
‑
虾头去除装置,31
‑
虾头夹具,32
‑
第一气缸,4
‑
虾身分片装置,41
‑
切割刀片,42
‑
第二气缸,43
‑
旋转气缸,44
‑
旋转吊钩,5
‑
虾仁分离装置,51
‑
左滑块,52
‑
右滑块,53
‑
左连接杆,54
‑
右连接杆,55
‑
左分离片,56
‑
右分离片,57
‑
第一横向导轨,58
‑
第三气缸,59
‑
第四气缸,6
‑
虾壳清理装置,61
‑
运动滑块,62
‑
清扫连接杆,63
‑
清扫毛刷,64
‑
第二横向导轨,65
‑
第五气缸,7
‑
升降气缸,100
‑
支撑台,101
‑
第一龙门架,102
‑
第二龙门架,103
‑
第三龙门架,104
‑
第四龙门架,105
‑
导轨。
【具体实施方式】
22.下面通过具体实施例并结合附图,对本发明做进一步详细说明,但本发明不仅局限于以下具体实施例。
23.以下所提供的实施例并非用以限制本发明所涵盖的范围,所描述的步骤也不是用以限制其执行顺序,所描述的方向仅限于附图。本领域技术人员结合现有公知常识对本发
明做显而易见的改进,亦落入本发明要求的保护范围之内。
24.一种自动剥虾装置,如图1~7所示,包括支撑台100、设于所述支撑台100上并用于放置小龙虾的工作台1、固定于所述支撑台100前端并用于带动所述工作台1在所述支撑台100上做往复运动的传动装置2、以及沿所述传动装置2的传动方向由近及远依次设于所述支撑台100上的第一龙门架101、第二龙门架102、第三龙门架103和第四龙门架104;所述第一龙门架101、第二龙门架102、第三龙门架103和第四龙门架104上依次分别固定有虾头去除装置3、虾身分片装置4、虾仁分离装置5以及虾壳清理装置6;所述第二龙门架102、第三龙门架103和第四龙门架104的底端均设有用于带动相应龙门架上下运动的升降气缸7。
25.进一步参阅图3所示,在有些实施例中,所述工作台1上设有一对用于加持、固定虾身的虾身夹片11,所述的一对虾身夹片11相对设置,且虾身夹片11之间形成虾身夹槽12,所述虾身夹片11的内侧上设有防滑纹路;所述虾身夹片11一端的中部均开设有长条状缺口111,以方便切割刀片41工作。
26.如图2、图3所示,在有些实施例中,所述传动装置2包括水平固定在所述支撑台100上的多位标准气缸21,所述多位标准气缸21的活塞杆22与所述工作台1固定连接,所述多位标准气缸21的两端还分别固定有用于加固所述多位标准气缸21的气缸安装板23和气缸固定板24,所述气缸安装板23和气缸固定板24均固定于所述支撑台100上。
27.在本实施例中,所述支撑台100上沿所述传动装置2的传动方向固定有导轨105,所述工作台1的底端开设有与所述导轨105相适配的导轨槽13,所述工作台1通过所述导轨槽13与所述导轨105滑动连接。
28.进一步参阅图1、图4所示,在在有些实施例中,所述虾头去除装置3包括虾头夹具31、带动所述虾头夹具31在水平方向上做往复运动的第一气缸32,所述第一气缸32固定在所述第一龙门架101的一侧,所述虾头夹具31固定在所述第一气缸32的活塞杆上。所述虾身夹片11靠近所述虾头夹具31一端的内侧开设有豁槽112,以方便虾头夹具31伸入到虾身夹槽12中。
29.在有些实施例中,所述虾头夹具31为具有自动加持功能的机械手。
30.进一步参阅图1、图5所示,在有些实施例中,所述虾身分片装置4包括切割装置和翻转装置;所述切割装置包括水平设置的切割刀片41、带动所述切割刀片41在水平方向上做往复运动的第二气缸42,所述第二气缸42固定在所述第二龙门架102的一侧,所述切割刀片41固定在所述第二气缸42的活塞杆上;所述翻转装置包括固定在所述第二龙门架102上端的旋转气缸43,所述旋转气缸43的活塞杆上固定连接有旋转吊钩44。
31.进一步参阅图1、图6所示,在有些实施例中,所述虾仁分离装置5包括沿所述第三龙门架103顶端设置的第一横向导轨57,分别滑动连接在所述第一横向导轨57上的左滑块51和右滑块52,所述左滑块51和右滑块52上分别固定有竖直向下的左连接杆53和右连接杆54,所述左连接杆53和右连接杆54下端分别固定有左分离片55和右分离片56;所述第三龙门架103顶端的左右两侧分别水平固定有用于带动所述左滑块51做往复运动的第三气缸58和用于带动所述右滑块52做往复运动的第四气缸59。
32.进一步参阅图1、图7所示,在有些实施例中,所述虾壳清理装置6包括沿所述第四龙门架104顶端设置的第二横向导轨64,滑动连接在所述第二横向导轨64上的运动滑块61,所述运动滑块61上固定有竖直向下的清扫连接杆62,所述清扫连接杆62的下端固定有清扫
毛刷63,所述第四龙门架104的顶端水平固定有用于带动所述运动滑块61沿所述第二横向导轨64做往复运动的第五气缸65。
33.在有些实施例中,该装置中的机械动作元件均通过plc控制系统控制。
34.为了更加清楚的描述本发明的实施方案,现提供本专利申请的具体工作方式及原理:首先,虾身侧躺通过一对虾身夹片11固定在工作台1上,虾头朝前;然后通过传动装置2的多位标准气缸21使得工作台1沿导轨105作直线运动;当工作台1运动到第一龙门架101正下方位置时,虾头去除装置3开始工作,由第一气缸32实现虾头夹具31的推送运动,然后由虾头夹具31夹住虾头,并通过第一气缸32实现虾头夹具31的回程运动,从而实现虾头与虾身的分离;当虾头去除后,工作台1在多位标准气缸21的带动下继续运动到第二龙门架102的正下方位置,虾身分片装置4开始工作,通过第二气缸42控制切割刀片41作直线往复运动,从而使去头后的虾身被分为两部分;虾身被分为两部分后,翻转装置开始工作,旋转吊钩44末端的钩子钩住虾身的上半部分,并通过旋转气缸43带动旋转吊钩44作旋转运动使上半部分虾身绕虾尾部完成180
°
翻转,该部分完成后两部分虾身都保持着虾仁在上,虾壳在下的状态。接着,工作台1继续运动至第三龙门架103正下方位置处,虾仁分离装置5开始工作,左、右两个滑块(51/52)沿第三龙门架103上的第一横向导轨57分别向两端运动,通过左、右连接杆(53/54)分别带动左、右分离片(55/56)向两侧运动,分离片将虾仁从虾壳上分离出来;虾仁分离后,工作台1继续运动到第四龙门架104正下方处,虾壳清理装置6开始工作,运动滑块61沿第四龙门架104上的第二横向导轨64从一端向另一端运动,通过清扫连接杆62带动清扫毛刷63运动,从而将虾壳从工作台1上清理出去;至此,已完成虾的去头、虾仁分离操作,接着工作台1通过多位标准气缸21实现回程运动,回到起点位置,开始下一轮剥虾操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1