一种残疾人下肢机器人运动检测系统的制作方法
:
[0001]
本实用新型涉及一种残疾人下肢机器人运动检测系统,属于医疗机械系统领域。
背景技术:
:
[0002]
随着人口老龄化社会的到来,由于生理机能衰退或因事故而引起的下肢运动障碍患者的数量急剧上升,这就为下肢机器人技术的发展提供了契机,而下肢是人行走等日常生活中最重要的部位,因此通过下肢机器人辅助患者进行站立及行走,帮助患者减轻并发症及痛苦,使其最大限度地回归正常生活已成下肢机器人领域中的迫切需求。
[0003]
下肢机器人作为一种新型的智能穿戴设备,融入了机械、控制、人机工程等领域先进的研究成果,能够增强人体的感官及力量,强化人体的运动能力和耐力,在军事、民用、医疗、护理及抢险等多方面具有极其广阔的应用前景。随着研究的逐渐深入和市场需求的日渐增长,如何获取下肢机器人运动的传感信息是值得关注的问题。
[0004]
目前大多数采用基于mems的姿态测量方法,但是由于低成本mems姿态测量精度低,很容易造成数据的虚假。
技术实现要素:
:
[0005]
在此前提下,本实用新型提出一种残疾人下肢机器人运动检测系统,基于高精度滑动编码器技术,提高下肢运动检测的准确性和稳定性。
[0006]
上述的目的通过以下的技术方案实现:
[0007]
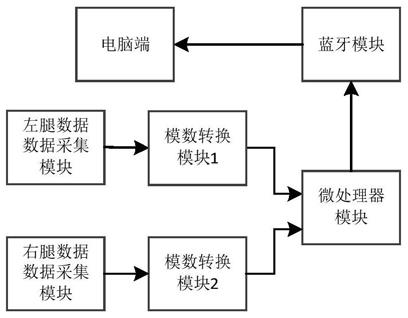
一种残疾人下肢机器人运动检测系统,包括左腿数据采集模块、右腿数据采集模块、模数转换模块1、模数转换模块2、微处理器模块、蓝牙模块以及电脑端;所述左腿数据采集模块与模数转换模块1电连接;所述右腿数据采集模块与模数转换模块2电连接;所述模数转换模块1与所述模数转换模块2都与微处理器模块电连接;所述蓝牙模块与微处理器模块电连接。
[0008]
所述的残疾人下肢机器人运动检测系统,所述左腿数据采集模块包括两个多圈可调电位器,两个多圈可调电位器分别用于检测左腿的下肢关节和大腿关节处的电位信号。
[0009]
所述的残疾人下肢机器人运动检测系统,所述右腿数据采集模块包括两个个多圈可调电位器,两个多圈可调电位器分别用于检测右腿的下肢关节和大腿关节处的电位信号。
[0010]
所述的残疾人下肢机器人运动检测系统,所述多圈可调电位器采用型号wxd3-13-2w的多圈可调电位器。
[0011]
所述的残疾人下肢机器人运动检测系统,所述模数转换模块1和所述模数转换模块2均包括一个14位模数转换芯片ad9240及外围电路。
[0012]
有益效果:
[0013]
1、本实用新型进一步提高下肢运动检测的准确性和稳定性。
[0014]
2、本实用新型能够实现蓝牙无线传输,使用方便。
附图说明:
[0015]
图1:本实用新型的系统结构图。
[0016]
图2:本实用新型的传感器安装示意图。
[0017]
图3:本实用新型的检测方法流程图。
具体实施方式:
[0018]
下面结合附图和具体实施方式对本实用新型详细说明。
[0019]
如图1-2所示:本实施例的一种残疾人下肢机器人运动检测系统,包括左腿数据采集模块、右腿数据采集模块、模数转换模块1、模数转换模块2、微处理器模块、蓝牙模块以及电脑端;所述左腿数据采集模块与模数转换模块1电连接;所述右腿数据采集模块与模数转换模块2电连接;所述模数转换模块1与所述模数转换模块2都与微处理器模块电连接;所述蓝牙模块与微处理器模块电连接。本实施例中的微处理器模块采用stm32f407处理器,蓝牙模块型号为rsbrs02aa。
[0020]
所述的残疾人下肢机器人运动检测系统,所述左腿数据采集模块包括两个多圈可调电位器,两个多圈可调电位器分别用于检测左腿的下肢关节和大腿关节处的电位信号。
[0021]
所述的残疾人下肢机器人运动检测系统,所述右腿数据采集模块包括两个个多圈可调电位器,两个多圈可调电位器分别用于检测右腿的下肢关节和大腿关节处的电位信号。
[0022]
所述的残疾人下肢机器人运动检测系统,所述多圈可调电位器采用型号wxd3-13-2w的多圈可调电位器。
[0023]
所述的残疾人下肢机器人运动检测系统,所述模数转换模块1和所述模数转换模块2均包括一个14位模数转换芯片ad9240及外围电路。
[0024]
用上述的残疾人下肢机器人运动检测系统进行残疾人下肢机器人运动检测的方法,该方法包括如下步骤:
[0025]
s1.对左腿数据采集模块和右腿数据采集模块的多圈可调电位器采集并分别经过模数转换模块1与所述模数转换模块2转换后得到的数字信号分别做滑动窗均值处理;
[0026]
s2.将步骤s1中滑动窗均值处理后的数据转换到下肢运动角度;
[0027]
s3.利用步骤s2得到的下肢运动角度,根据建立的数据库匹配对应的运动模式;
[0028]
数据库如下:
[0029] 0~10(单位度)10~20(单位度)30以上(单位度)0~5(单位度)严重残疾中等程度残疾轻度残疾5~10(单位度)严重残疾中等程度残疾轻度残疾10以上(单位度)轻度残疾轻度残疾正常行走
[0030]
上表分别对左腿和右腿判断。左腿根据z1和z2的值判断;右腿根据z3和z4的值判断。
[0031]
上表格中横参数表示对应的z1或者z3,竖参数表示对应的z2或者z4。
[0032]
s4.步态计算:通过步骤s2中得到的下肢运动角度的变化检测行走步数。
[0033]
所述的残疾人下肢机器人运动检测的方法,步骤s1中所述的滑动窗均值处理的公式如下:
[0034][0035][0036][0037][0038]
其中,l
i
表示左腿多圈可调电位器1采集并经过模数转换后得到的数字信号;m
i
表示左腿多圈可调电位器2采集并经过模数转换后得到的数字信号;n
i
表示右腿多圈可调电位器1采集并经过模数转换后得到的数字信号;q
i
表示右腿多圈可调电位器2采集并经过模数转换后得到的数字信号;n表示滑动窗口宽度为150s;a1,a2,a3,a4分别表示l
i
、m
i
、n
i
、q
i
经过滑动窗均值处理后的数据。
[0039]
所述的残疾人下肢机器人运动检测的方法,步骤s2中所述的将滑动窗均值处理后的数据转换到下肢运动角度,转换公式如下:
[0040][0041][0042][0043][0044]
其中,p为多圈可调电位器对应的最大值;z1表示左腿多圈可调电位器1对应的角度值;z2表示左腿多圈可调电位器2对应的角度值;z3表示右腿多圈可调电位器1对应的角度值;z4表示右腿多圈可调电位器2对应的角度值。
[0045]
所述的残疾人下肢机器人运动检测的方法,步骤s4中所述的通过步骤s2中得到的下肢运动角度的变化检测行走步数的方法是根据左腿多圈可调电位器1对应的角度值z1,和右腿多圈可调电位器1对应的角度值z3判断行走步数,具体如下:
[0046]
s41.获取当前z1和z3的角度值;
[0047]
s42.寻找z1和z3的角度曲线的最大值和最小值;
[0048]
s43.当两条角度曲线在某时刻同时存在最大值或者最小值时,认为该时刻走了一步。
[0049]
最后需要说明的是:以上是本实用新型技术方案和具体实施的方法,但是并不是限制本实用新型所描述技术方案。尽管对其进行了详细具体的说明,但是具体实现的时候,技术人员可以根据实际情况对其进行相应的修改或者等同替换。一切不脱离本实用新型的
精神范围的技术方案改进,均应涵盖在本实用新型的权利要求之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1