仿生手智能控制系统及方法以及智能仿生手装置与流程
1.本发明属于仿生装置技术领域,涉及一种仿生装置,尤其涉及一种仿生手智能控制系统及方法以及智能仿生手装置。
背景技术:
2.仿生机械手作为现如今解决病人截肢后生活自理的主要手段,仍是一个较为新兴热门的产品,市场上产品种类参差不齐,行业中尚未有对此类产品明确的要求和标准。
3.仿生机械手通常设有按钮,但该按钮的作用单一,通常只具备开机关机的作用。在一些场景下,仿生机械手在使用时存在不便。
4.有鉴于此,如今迫切需要设计一种新的仿生机械手,以便克服现有仿生机械手存在的上述至少部分缺陷。
技术实现要素:
5.本发明提供一种仿生手智能控制系统及方法以及智能仿生手装置,可通过在单一按钮开机、关机的基础上,不增加硬件成本和占用空间,增加智能仿生手义肢的动作切换和动作锁定功能,实现一键多功能。
6.为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
7.一种仿生手智能控制系统,所述智能控制系统包括:
8.按压持续时间获取模块,用以获取按键被持续按压的时间;
9.按压持续时间分类模块,用以分配所述按压持续时间获取模块获取的按压持续时间所在的持续时间区间;
10.当前状态获取模块,用以获取仿生手当前的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态;
11.控制命令获取模块,用以按照所述按压持续时间分类模块获取的对应类别及所述当前状态获取模块获取的仿生手的状态,生成按压动作对应的控制命令。
12.作为本发明的一种实施方式,所述智能控制系统包括:
13.仿生手状态获取模块,用以获取仿生手所处的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态;
14.控制命令分类模块,用以对仿生手的控制命令进行分类;控制命令的类别包括:动作锁定控制命令、解除锁定控制命令、动作切换控制命令及开关机命令;
15.控制模式设定模块,用以设定仿生手在各个状态下,不同的按压持续时间区间对应不同的控制命令。
16.作为本发明的一种实施方式,所述控制模式设定模块的控制模式设定包括:
17.对于仿生手处于展开状态下,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作切换控制命令,按设定顺序切换仿生手的待执行动作;
18.对于仿生手处于动作执行状态下,对于仿生手处于未被锁定动作时,针对按键被
按压第一持续时间区间内,设定其对应的控制命令为动作锁定控制命令,用以锁定仿生手的动作;
19.对于仿生手处于动作执行状态下,对于仿生手处于被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为解除锁定控制命令,用以解除锁定。
20.作为本发明的一种实施方式,所述仿生手智能控制系统进一步包括:
21.仿生手电机电流获取电路,用以获取流过仿生手各驱动电机的电流;
22.仿生手持握压力分析模块,用以根据所述仿生手电机电流获取电路获取的电流分析仿生手持握物体的压力数据;
23.仿生手电机反馈控制电路,用以根据所述仿生手持握压力分析模块分析得到的压力数据控制仿生手各驱动电机的动作。
24.根据本发明的另一个方面,采用如下技术方案:一种智能仿生手装置,所述智能仿生手装置包括上述的仿生手智能控制系统。
25.作为本发明的一种实施方式,所述智能仿生手装置进一步包括仿生手本体、控制电路,所述仿生手本体设有按键;
26.所述控制电路包括微处理器及信号处理电路,所述微处理器连接所述信号处理电路,所述信号处理电路连接所述按键;
27.所述信号处理电路包括按键信号输出端、电源保持信号输入端、电源使能信号输出端及按键连接端;
28.所述电源使能信号输出端连接电源电路,所述按键信号输出端、电源保持信号输入端分别连接微处理器,所述按键连接端连接按键;
29.在所述按键处于第一状态下,所述按键信号输出端的电平状态为第一电平状态;在所述按键处于第二状态下,所述按键信号输出端的电平状态为第二电平状态;
30.所述微处理器用以根据所述按键信号输出端为第一电平状态的持续时间控制所述电源保持信号输入端及电源使能信号输出端的输出。
31.根据本发明的又一个方面,采用如下技术方案:一种仿生手智能控制方法,所述智能控制方法包括:
32.按压持续时间获取步骤;获取按键被持续按压的时间;
33.按压持续时间分类步骤;分配所述按压持续时间获取步骤获取的按压持续时间所在的持续时间区间;
34.当前状态获取步骤;获取仿生手当前的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态;
35.控制命令获取步骤;按照所述按压持续时间分类模块获取的对应类别、所述当前状态获取模块获取的仿生手的状态,结合所述控制模式设定步骤设定的仿生手在各个状态下不同的按压持续时间区间对应不同的控制命令,生成按压动作对应的控制命令。
36.作为本发明的一种实施方式,所述智能控制方法包括:
37.仿生手状态获取步骤;获取仿生手所处的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态;
38.控制命令分类步骤;对仿生手的控制命令进行分类;控制命令的类别包括:动作锁定控制命令、解除锁定控制命令、动作切换控制命令及开关机命令;
39.控制模式设定步骤;设定仿生手在各个状态下,不同的按压持续时间区间对应不同的控制命令。
40.作为本发明的一种实施方式,所述控制模式设定步骤的控制模式设定过程包括:
41.对于仿生手处于展开状态下,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作切换控制命令,按设定顺序切换仿生手的待执行动作;
42.对于仿生手处于动作执行状态下,对于仿生手处于未被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作锁定控制命令,用以锁定仿生手的动作;
43.对于仿生手处于动作执行状态下,对于仿生手处于被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为解除锁定控制命令,用以解除锁定。
44.作为本发明的一种实施方式,所述仿生手智能控制方法进一步包括:
45.获取流过仿生手各驱动电机的电流;
46.根据获取电路获取的电流分析仿生手持握物体的压力数据;
47.根据分析得到的压力数据控制仿生手各驱动电机的动作。
48.本发明的有益效果在于:本发明提出的仿生手智能控制系统及方法以及智能仿生手装置,可通过在单一按钮开机、关机的基础上,不增加硬件成本和占用空间,增加智能仿生手义肢的动作切换和动作锁定功能,实现一键多功能。
附图说明
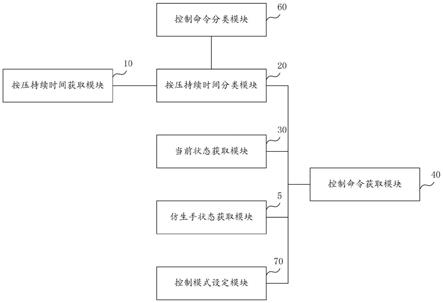
49.图1为本发明一实施例中仿生手智能控制系统的组成示意图。
50.图2为本发明一实施例中智能仿生手装置的结构示意图。
51.图3为本发明一实施例中智能仿生手装置的组成示意图。
52.图4为本发明一实施例中信号处理电路的电路示意图。
具体实施方式
53.下面结合附图详细说明本发明的优选实施例。
54.为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
55.该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
56.说明书中的“连接”既包含直接连接,也包含间接连接。
57.本发明揭示一种仿生手智能控制系统,图1为本发明一实施例中仿生手智能控制系统的组成示意图;请参阅图1,所述智能控制系统包括:按压持续时间获取模块10、按压持续时间分类模块20、当前状态获取模块30及控制命令获取模块40。
58.所述按压持续时间获取模块10用以获取按键被持续按压的时间。所述按压持续时间分类模块20用以分配所述按压持续时间获取模块获取的按压持续时间所在的持续时间区间。所述当前状态获取模块30用以获取仿生手当前的状态;仿生手所处的状态包括:展开
状态及至少一动作执行状态。所述控制命令获取模块40用以按照所述按压持续时间分类模块获取的对应类别及所述当前状态获取模块获取的仿生手的状态,生成按压动作对应的控制命令。
59.请继续参阅图1,在本发明的一实施例中,所述智能控制系统包括:仿生手状态获取模块50、控制命令分类模块60及控制模式设定模块70。所述仿生手状态获取模块50用以获取仿生手所处的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态。所述控制命令分类模块60用以对仿生手的控制命令进行分类(或设定);控制命令的类别包括:动作锁定控制命令、解除锁定控制命令、动作切换控制命令及开关机命令。所述控制模式设定模块70用以设定仿生手在各个状态下,不同的按压持续时间区间对应不同的控制命令。
60.在一实施例中,仿生手的状态包括:连通电源状态、未连通电源状态;连通电源状态下,进一步包括:动作执行状态、展开状态(可以是设定展开状态,如可以为设定放松姿态);动作执行状态下,可以包括伸直姿态、第一持握姿态(如持握饮料瓶)、第二持握姿态(如持握筷子)、第三持握姿态(如持握笔),当然也可以包括其他设定姿态,具体姿态可以根据需要设定。
61.在本发明的一实施例中,所述控制模式设定模块70的控制模式设定包括:对于仿生手处于展开状态下,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作切换控制命令,按设定顺序切换仿生手的待执行动作。
62.对于仿生手处于动作执行状态下,对于仿生手处于未被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作锁定控制命令,用以锁定仿生手的动作。
63.对于仿生手处于动作执行状态下,对于仿生手处于被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为解除锁定控制命令,用以解除锁定将仿生手的动作。
64.在本发明的一实施例中,所述仿生手智能控制系统进一步包括:仿生手电机电流获取电路、仿生手持握压力分析模块及仿生手电机反馈控制电路。所述仿生手电机电流获取电路用以获取流过仿生手各驱动电机的电流;所述仿生手持握压力分析模块用以根据所述仿生手电机电流获取电路获取的电流分析仿生手持握物体的压力数据;所述仿生手电机反馈控制电路用以根据所述仿生手持握压力分析模块分析得到的压力数据控制仿生手各驱动电机的动作。在一实施例中,通过所述仿生手电机反馈控制电路控制电机的动作,从而控制仿生手的姿态,使仿生手持握的压力在设定压力范围内,避免压力过大或太小。
65.本发明还揭示一种仿生手智能控制方法,所述智能控制方法包括:
66.按压持续时间获取步骤;获取按键被持续按压的时间;
67.按压持续时间分类步骤;分配所述按压持续时间获取步骤获取的按压持续时间所在的持续时间区间;
68.当前状态获取步骤;获取仿生手当前的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态;
69.控制命令获取步骤;按照所述按压持续时间分类模块获取的对应类别、所述当前状态获取模块获取的仿生手的状态,结合所述控制模式设定步骤设定的仿生手在各个状态下不同的按压持续时间区间对应不同的控制命令,生成按压动作对应的控制命令。
70.在本发明的一实施例中,所述智能控制方法包括:
71.仿生手状态获取步骤;获取仿生手所处的状态;仿生手所处的状态包括:展开状态及至少一动作执行状态;
72.控制命令分类步骤;对仿生手的控制命令进行分类;控制命令的类别包括:动作锁定控制命令、解除锁定控制命令、动作切换控制命令及开关机命令;
73.控制模式设定步骤;设定仿生手在各个状态下,不同的按压持续时间区间对应不同的控制命令。
74.在一实施例中,所述控制模式设定步骤的控制模式设定过程包括:
75.对于仿生手处于展开状态下,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作切换控制命令,按设定顺序切换仿生手的待执行动作;
76.对于仿生手处于动作执行状态下,对于仿生手处于未被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为动作锁定控制命令,用以锁定仿生手的动作;
77.对于仿生手处于动作执行状态下,对于仿生手处于被锁定动作时,针对按键被按压第一持续时间区间内,设定其对应的控制命令为解除锁定控制命令,用以解除锁定将仿生手的动作。
78.在本发明的一实施例中,所述仿生手智能控制方法进一步包括:获取流过仿生手各驱动电机的电流;根据获取电路获取的电流分析仿生手持握物体的压力数据;根据分析得到的压力数据控制仿生手各驱动电机的动作。在一实施例中,通过控制电机的动作,从而控制仿生手的姿态,使仿生手持握的压力在设定压力范围内,避免压力过大或太小。
79.本发明进一步揭示一种智能仿生手装置,所述智能仿生手装置包括上述的仿生手智能控制系统。
80.图2为本发明一实施例中智能仿生手装置的结构示意图,图3为本发明一实施例中智能仿生手装置的组成示意图;请参阅图2、图3,所述智能仿生手装置包括仿生手本体1、控制电路3,所述仿生手本体1设有按键2。所述控制电路3包括微处理器31及信号处理电路32,所述微处理器31连接所述信号处理电路32,所述信号处理电路32连接所述按键2。
81.所述信号处理电路32包括按键信号输出端p_in、电源保持信号输入端on、电源使能信号输出端so及按键连接端;所述电源使能信号输出端so连接电源电压,所述按键信号输出端p_in、电源保持信号输入端on分别连接微处理器31,所述按键连接端连接按键2。在所述按键2处于第一状态下,所述按键信号输出端p_in的电平状态为第一电平状态;在所述按键2处于第二状态下,所述按键信号输出端p_in的电平状态为第二电平状态。
82.所述微处理器31用以根据所述按键信号输出端p_in为第一电平状态的持续时间控制所述电源保持信号输入端on及电源使能信号输出端so的输出。
83.在本发明的一实施例中,所述按键2的第一端连接所述信号处理电路32,所述按键2的第二端接地。
84.图4为本发明一实施例中信号处理电路的电路示意图;请参阅图4,在本发明的一实施例中,所述信号处理电路32包括:按键信号输出单元321、电源控制信号输入单元322及电源控制信号输出单元333。所述按键信号输出单元321的输入端连接按键,所述按键信号输出单元321的输出端连接所述微处理器31,用以根据按键的状态输出按键信号至所述微
处理器31。所述电源控制信号输入单元322的输入端连接所述微处理器的输出端,所述电源控制信号输入单元的输出端连接一电源控制信号输出单元的输入端,用以向电源控制信号输出单元输入电源控制信号。所述电源控制信号输出单元323的输入端分别连接按键信号输出单元321及电源控制信号输入单元322,所述电源控制信号输出单元323的输出端连接电源电路34,用以接收所述按键信号输出单元321及电源控制信号输入单元322的输出信号,并向电源电路34输出控制信号。
85.在本发明的一实施例中,所述按键信号输出单元包括:第三三极管q3、第一一电阻r11、第一二电阻r12、第一四电阻r14及第一五电阻r15;所述第三三极管q3的发射极分别连接按键信号输出端及第一一电阻r11的第二端,第一一电阻r11的第一端连接第一电源电压;所述第三三极管q3的集电极接地;所述第三三极管q3的基极通过第一四电阻r14分别连接按键的第一端、第一二电阻r12的第二端及第一五电阻r15的第一端,第一二电阻r12的第二端连接第二电源电压;所述按键的第二端接地。
86.所述电源控制信号输入单元包括第五三极管q5、第二八电容c28、第一八电阻r18及第一九电阻r19;所述第一六电阻r16的第二端连接第五三极管q5的集电极,所述第五三极管q5的基极连接第一八电阻r18的第二端;所述第一八电阻r18的第一端分别连接按键信号输出端、第二八电容c28的第一端、第一九电阻r19的第一端;所述第五三极管q5的发射极、第二八电容c28的第二端、第一九电阻r19的第二端分别接地。
87.所述电源控制信号输出单元包括第四三极管q4、第二六电容c26、第一三电阻r13及第一七电阻r17。所述第一三电阻r13的第一端连接第四三极管q4的基极;所述第四三极管q4的发射极分别连接第二电源电压、第一三电阻r13的第二端、第二六电容c26的第一端;第二六电容c26的第二端接地;所述第四三极管q4的集电极分别连接电源使能信号输出端及第一七电阻r17的第一端,第一七电阻r17的第二端接地。
88.请参阅图3,在本发明的一实施例中,所述信号处理电路32包括:第三三极管q3、第四三极管q4、第五三极管q5、第二六电容c26、第二八电容c28及若干电阻。
89.所述第三三极管q3的发射极分别连接按键信号输出端及第一一电阻r11的第二端,第一一电阻r11的第一端连接第一电源电压;所述第三三极管q3的集电极接地。所述第三三极管q3的基极通过第一四电阻r14分别连接按键的第一端、第一二电阻r12的第二端及第一五电阻r15的第一端,第一二电阻r12的第二端连接第二电源电压;所述按键的第二端接地。所述第一五电阻r15的第二端分别连接第一三电阻r13的第一端、第四三极管q4的基极、第一六电阻r16的第一端。
90.所述第四三极管q4的发射极分别连接第二电源电压、第一三电阻r13的第二端、第二六电容c26的第一端;第二六电容c26的第二端接地。所述第四三极管q4的集电极分别连接电源使能信号输出端及第一七电阻r17的第一端,第一七电阻r17的第二端接地。
91.所述第一六电阻r16的第二端连接第五三极管q5的集电极,所述第五三极管q5的基极连接第一八电阻r18的第二端;所述第一八电阻r18的第一端分别连接按键信号输出端、第二八电容c28的第一端、第一九电阻r19的第一端。所述第五三极管q5的发射极、第二八电容c28的第二端、第一九电阻r19的第二端分别接地。
92.在一实施例中,所述第一电源电压低于所述第二电源电压。所述第一电源电压可以为3.3v,所述第二电源电压可以为7.4v。
93.在本发明的一种使用场景中,当vcc7v4有电压输入的时候,按键key1按下去,so输出接近vcc7v4的电压,控制电源电路开始工作,设备的mcu正常启动,并通过给on高电平来保持so输出,这时候松开按键,设备保持开机状态。
94.在开机状态下,按下key1,会在p_in处产生低电平。按住key1,则p_in维持低电平,经mcu判别p_in维持低电平超过一定时间t,则通过输出给on低电平,此时释放按钮key1,so输出接近0v的电压,控制电源电路关闭,从使得设备断电关机;若按下key1的时间不足t,经mcu判别后,视当前智能仿生手的动作状态,可以切换动作(智能仿生手放松状态)或者切换锁定/解锁状态(智能仿生手处于动作执行的状态,即非放松状态)。
95.综上所述,本发明提出的仿生手智能控制系统及方法以及智能仿生手装置,可通过在单一按钮开机、关机的基础上,不增加硬件成本和占用空间,增加智能仿生手义肢的动作切换和动作锁定功能,实现一键多功能。
96.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
97.这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。实施例中所涉及的效果或优点可因多种因素干扰而可能不能在实施例中体现,对于效果或优点的描述不用于对实施例进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1