手术机器人及其控制方法、控制系统与流程
本技术涉及医疗器械领域,特别是涉及一种手术机器人、手术机器人的控制方法及手术机器人的控制系统。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式,微创手术具有创伤小、疼痛轻、恢复快等优势。
2、随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作台及从操作设备,主操作台用于根据医生的操作向从操作设备发送控制命令,以控制从操作设备,从操作设备用于响应主操作台发送的控制命令,并进行相应的手术操作。
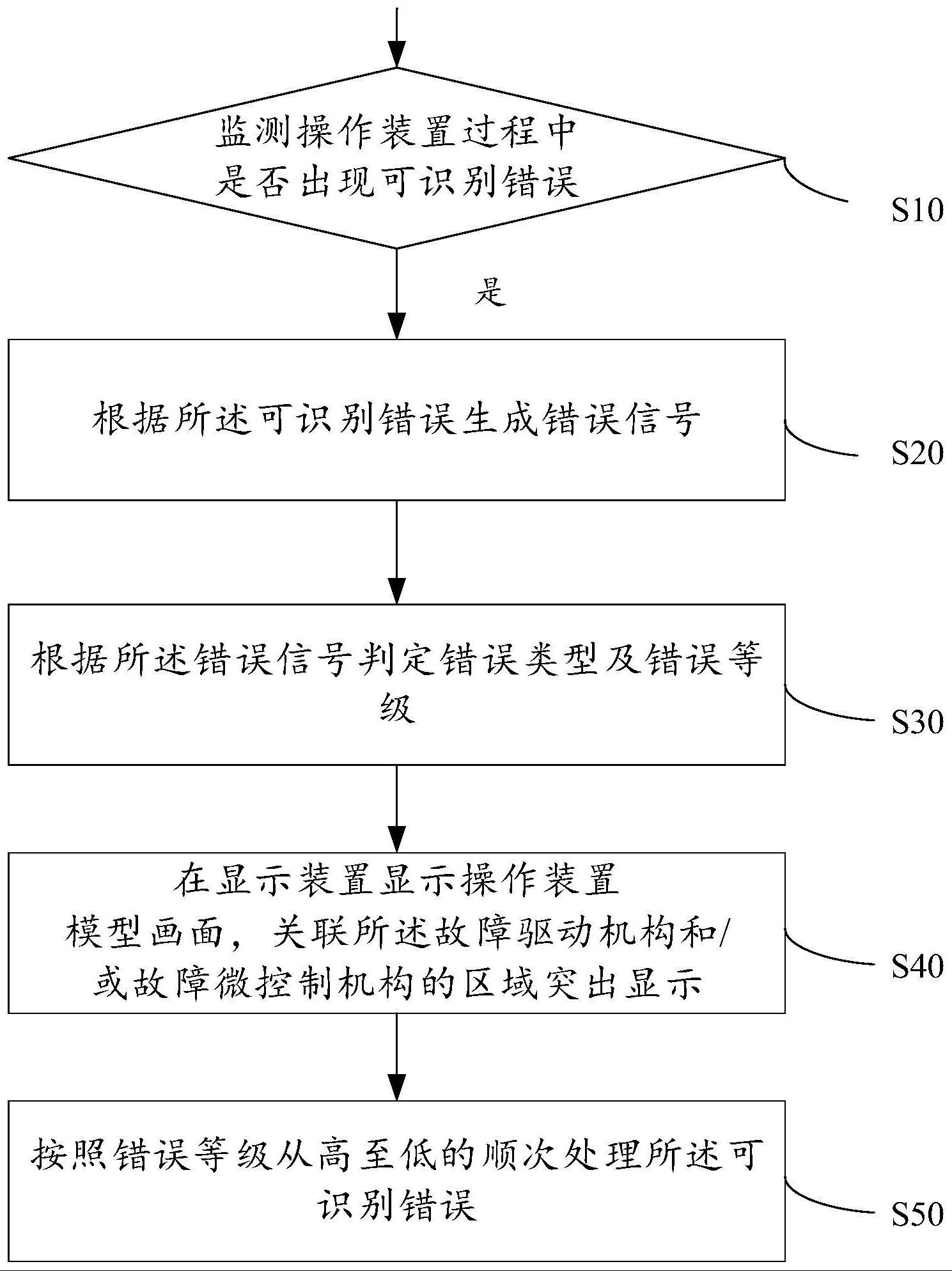
3、手术机器人在日常使用过程中控制系统难免会遇到出错的情况,包括运行错误和运动错误等,因此,如何对错误进行指示从而提高系统的可用性和可靠性成为亟需解决的问题。
技术实现思路
1、基于此,为解决上述术问题,本技术提供一种手术机器人及其控制方法、控制系统。
2、本技术实施例的第一方面提供一种手术机器人,包括:
3、操作装置,包括驱动机构和/或微控制机构;
4、显示装置;以及
5、控制装置,与所述显示装置耦接,并与所述驱动机构和/或所述微控制机构耦接,并被配置成用于执行:
6、监测到所述驱动机构和/或所述微控制机构在运行过程中出现可识别错误时,识别所述可识别错误关联的故障驱动机构和/或故障微控制机构;
7、获取所述操作装置的模型图像;
8、在所述显示装置中突出地显示所述模型图像中关联所述故障驱动机构和/或故障微控制机构的区域。
9、在一个具体的实施例中,所述操作装置包括主操作控制台,所述主操作控制台包括所述驱动机构和/或所述微控制机构。
10、在一个具体的实施例中,所述操作装置包括从操作设备,所述从操作设备包括所述驱动机构和/或所述微控制机构。
11、在一个具体的实施例中,所述操作装置包括手术床,所述手术床包括所述驱动机构和/或所述微控制机构。
12、在一个具体的实施例中,所述可识别错误包括所述驱动机构的运动错误。
13、在一个具体的实施例中,所述可识别错误包括所述微控制机构的运行错误。
14、在一个具体的实施例中,所述控制装置被配置成用于执行:
15、判定所述可识别错误的错误类型;
16、其中,所述错误类型包括跟随误差错误、电流过载错误、微控制器错误、数字控制轴错误、编码器错误及驱动器错误中的至少一种。
17、在一个具体的实施例中,所述控制装置被配置成用于执行:
18、根据所述可识别错误的错误类型判定错误等级;
19、其中,编码器错误、驱动器错误的错误等级高于微控制器错误、所述跟随误差错误的错误等级,所述微控制器错误、所述跟随误差错误的错误等级高于所述电流过载错误的错误等级和所述数字控制轴错误的错误等级。
20、在一个具体的实施例中,所述监测所述驱动机构和/或微控制机构在运行过程中出现可识别错误的步骤中,执行:
21、监测所述驱动机构当前的跟随误差是否超过设定的跟随误差阈值;
22、在所述驱动机构的当前跟随误差超过跟随误差阈值时,所述手术机器人被配置成,执行:
23、停止所述驱动机构运行;
24、清除所述跟随误差错误;
25、若清除次数超过预设清除次数阈值,所述跟随误差错误清除仍不成功,停止所述驱动机构所属的模块单元运行,将所述跟随误差错误的错误等级设为最高错误等级。
26、在一个具体的实施例中,所述监测所述驱动机构和/或微控制机构在运行过程中出现可识别错误的步骤中,执行:
27、监测所述驱动机构在预设时长内的电流平均值是否超过设定的电流阈值;
28、在所述驱动机构在预设时长内的电流平均值超过所述电流阈值时,所述手术机器人被配置成执行:
29、检测故障驱动机构所属的模块单元关联的驱动机构是否处于运动状态;
30、在检测到故障驱动机构所属的模块单元的驱动机构处于运动状态时,制动所述驱动机构。
31、在一个具体的实施例中,所述监测所述驱动机构和/或微控制机构在运行过程中出现可识别错误的步骤中,执行:
32、监测微控制器是否处于运行状态;
33、在识别到出所述故障微控制机构时,检测所述故障微控制器所属的模块单元关联的驱动机构是否处于运动状态;
34、在检测到所述故障微控制器所属的模块单元的驱动机构处于运动状态时,制动所述驱动机构。
35、在一个具体的实施例中,所述判定所述可识别错误的错误类型的步骤中,当错误类型为数字控制轴错误时执行:
36、重置数字控制轴状态;
37、若重置次数超过预设重置次数阈值,所述数字控制轴状态仍重置不成功,停止所述数字控制轴对应的驱动机构运行,将所述数字控制轴错误的错误等级升高一级;
38、重复上述两个步骤,直到所述数字控制轴错误的错误等级升高到最高等级或者所述数字控制轴状态重置成功。
39、在一个具体的实施例中,所述判定所述可识别错误的错误类型的步骤中,当错误类型为编码器错误或驱动器错误时执行:
40、停止所述编码器错误或所述驱动器错误对应的驱动机构运行;
41、将所述驱动机构所属的模块单元的其它驱动机构停止运动,并控制所述驱动机构的制动机构锁死。
42、在一个具体的实施例中,所述在所述显示装置中突出地显示所述模型图像中关联所述故障驱动机构和/或故障微控制机构的区域的步骤中,根据所述可识别错误的错误类型和/或错误等级的不同,采用不同的突出显示的方式显示不同错误类型和/或错误等级的可识别错误,所述不同的突出显示的方式包括颜色、图案、亮度、闪烁、标记其中一种或一种以上的组合。
43、在一个具体的实施例中,所述在所述显示装置中突出地显示所述模型图像中关联所述故障驱动机构和/或故障微控制机构的区域的步骤中,在所述显示装置中显示所述可识别错误的错误类型和/或错误等级对应的代码和/或所述可识别错误的故障驱动机构和/或故障微控制机构的位置编号。
44、本技术实施例的第二方面提供一种手术机器人控制方法,所述手术机器人包括:操作装置,包括驱动机构和/或微控制机构;显示装置;以及控制装置,与所述显示装置耦接,并与所述驱动机构和/或所述微控制机构耦接;其特征在于,所述手术机器人控制方法包括以下步骤:
45、监测到所述驱动机构和/或微控制机构在运行过程中出现可识别错误时,识别所述可识别错误关联的故障驱动机构和/或故障微控制机构;
46、生成所述操作装置的模型图像;
47、在所述显示装置中突出地显示所述模型图像中关联所述故障驱动机构和/或故障微控制机构的区域。
48、本技术第三方面提供一种手术机器人控制系统,包括:
49、存储器,用于存储计算机程序;
50、及控制器,用于加载并执行所述计算机程序;
51、其中,所述计算机程序被配置为由所述控制器加载并执行实现如前文所述的手术机器人控制方法的步骤。
52、本技术的另一方面提供一种计算机可读存储介质,其特征在于:所述计算机可读存储介质适用于手术机器人,所述手术机器人包括:操作装置,包括驱动机构和/或微控制机构;显示装置;以及控制装置,与所述显示装置耦接,并与所述驱动机构和/或所述微控制机构耦接;
53、所述手术机器人控制方法包括以下步骤:
54、监测到所述驱动机构和/或微控制机构在运行过程中出现可识别错误时,识别所述可识别错误关联的故障驱动机构和/或故障微控制机构;
55、生成所述操作装置的模型图像;
56、在所述显示装置中突出地显示所述模型图像中关联所述故障驱动机构和/或故障微控制机构的区域。
57、本技术的手术机器人及其控制方法、控制系统至少具有以下有益效果:本技术的手术机器人及其控制方法、控制系统,如果驱动机构出现运动错误或者微控制机构出现运行错误,在显示装置上产生的模型图像上对关联故障驱动机构和/或故障微控制机构的区域可识别错误进行关联的区域进行突出显示,极大方便错误排查。
- 还没有人留言评论。精彩留言会获得点赞!