用于密封组织的电外科系统和方法与流程
用于密封组织的电外科系统和方法
1.相关申请的交叉引用
2.本技术要求在2021年2月11日提交的美国临时专利申请第63/148,418号的权益和优先权,所述申请的全部内容在此以引用的方式并入本文中。
技术领域
3.本公开涉及电外科,且更确切地说,涉及用于密封组织的电外科系统和方法。
背景技术:
4.在双极电外科中,电流通过定位在不同极性的电极之间的组织传导以加热且由此处理组织。双极电外科通常涉及使用电外科钳,所述电外科钳为依靠其钳口之间的机械动作来抓取、夹持和收缩组织的钳子类器械。更确切地说,电外科钳利用机械夹持动作和电能来处理例如烧灼、凝结和/或密封的所夹持组织。
5.烧灼涉及使用热量来破坏组织,且凝结是使组织干燥以使得组织细胞破裂和干燥的过程,而组织密封是使组织中的胶原蛋白、弹性蛋白和磨制物质液化以使得其重新形成为熔体的过程,其中相对组织结构之间的分界明显减少。为了产生有效组织密封,必须准确地控制两个主要机械参数:施加到组织的压力和电极之间的间隙距离。另外,必须在受控条件(例如,控制向组织施加的电外科能量的强度、频率和持续时间)下向组织施加电外科能量,以确保产生有效组织密封。
技术实现要素:
6.如本文中所使用,术语“远侧”是指所描述的离操作员(无论是人类外科医生还是外科机器人)较远的部分,而术语“近侧”是指所描述的较接近操作员的部分。如本文中所使用,包含“通常”、“约”、“大体上”等的术语意在涵盖高达且包含正负10%的变化,例如制造公差、材料公差、使用和环境公差、测量变化、设计变化和/或其它变化。此外,在一致的程度上,本文详述的任何或所有方面可以与本文详述的任何或所有其它方面结合使用。
7.根据本公开的密封组织的方法包含:在第一钳口部件与第二钳口部件之间抓取组织;根据预处理算法向所抓取组织施加能量以在预期组织密封时对所抓取组织进行预处理;和根据组织密封算法向预处理的所抓取组织施加能量以密封预处理的所抓取组织。
8.在本公开的方面中,组织密封算法独立于预处理算法。
9.在本公开的另一方面中,以第一方式控制预处理算法且以第二不同种方式控制组织密封算法。预处理算法的至少一部分可为电压控制的。预处理算法的至少一部分可遵循电压-时间图,在一方面中,所述电压-时间图包含固定的正电压斜坡。组织密封算法的至少一部分可调整能量输出以追踪阻抗-时间轨迹。
10.在本公开的又另一方面中,方法还包含在根据组织密封算法向预处理的所抓取组织施加能量之前确定预处理算法是否完成。
11.在本公开的又另一方面中,确定预处理算法是否完成包含将总阻抗变化与阻抗变
化阈值进行比较。
12.在本公开的又另一方面中,方法还包含,在根据预处理算法向所抓取组织施加能量之后且在根据组织密封算法向预处理的所抓取组织施加能量之前算法,实施不施加能量的延迟周期。
13.根据本公开的方面的密封组织的另一方法包含在第一钳口部件与第二钳口部件之间抓取组织,且确定是否将执行对所抓取组织的预处理。在确定将执行所抓取组织的预处理的情况下,方法包含根据预处理算法向所抓取组织施加能量以在预期组织密封时对所抓取组织进行预处理,且根据组织密封算法向预处理的所抓取组织施加能量以密封预处理的所抓取组织。在不确定将执行对所抓取组织的预处理的情况下,方法包含根据组织密封算法向所抓取组织施加能量以密封所抓取组织。
14.在本公开的方面中,组织密封算法独立于预处理算法。
15.在本公开的另一方面中,基于以下确定是否将执行对所抓取组织的预处理:传感器反馈、所抓取组织的所确定大小、手动输入、由第一钳口部件和第二钳口部件向所抓取组织施加的夹持力,和/或其间有所抓取组织的第一钳口部件与第二钳口部件的相对表面之间的间隙距离。
16.在本公开的又另一方面中,在确定将执行对所抓取组织的预处理的情况下,方法还包含在根据组织密封算法向预处理的所抓取组织施加能量之前确定预处理算法是否完成。
17.在本公开的又另一方面中,确定预处理算法是否完成包含:确定预处理期间的总阻抗变化、确定预处理期间所抓取组织的大小、确定预处理期间由第一钳口部件和第二钳口部件向所抓取组织施加的夹持力,和/或确定预处理期间第一钳口部件与第二钳口部件的相对表面之间的间隙距离。
18.在本公开的又另一方面中,预处理算法的至少一部分为电压控制的,和/或组织密封算法的至少一部分调整能量输出以追踪阻抗-时间轨迹。
19.根据本公开还提供了用于实施上述方法的电外科系统,例如,包含电外科发生器和电外科钳。
附图说明
20.当结合附图考虑以下详细描述时,本公开的以上和其它方面和特征将变得更显而易见,其中相同的附图标号标号相似或相同的元件。
21.图1为根据本公开的包含电外科钳和电外科发生器的电外科系统的透视图;
22.图2a和2b是图1的钳子的远端部分的放大透视图,其中其末端执行器组件分别安置在间隔开的位置和接近位置;
23.图3为根据本公开的配置成使用的机器人外科系统的示意性图示;
24.图4为图1的发生器的框图;
25.图5为配置成与图1的钳子或图3的系统一起使用的另一末端执行器组件的纵向横截面图;
26.图6为图5的末端执行器组件的横向横截面图,其中传感器与末端执行器组件分离;
27.图7为配置成与图5和图6的末端执行器组件一起使用的发生器的框图;
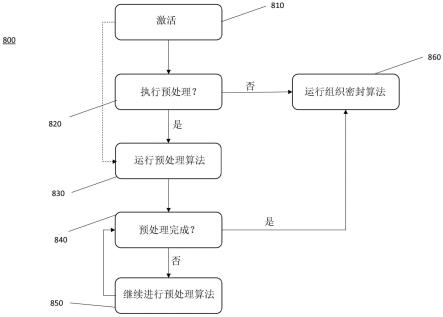
28.图8为说明根据本公开的密封组织的方法的流程图;
29.图9a为说明根据本公开的密封组织的方法的流程图,其中总是实施预处理;
30.图9b为说明根据本公开的密封组织的方法的流程图,其中利用基于传感器的反馈来确定是否将执行预处理;
31.图9c为说明根据本公开的密封组织的方法的流程图,其中用户选择指示是否执行预处理;和
32.图10为与本公开的算法相比,使用控制算法密封的各种容器大小的爆破压力的实验结果的图。
具体实施方式
33.参看图1,展示通常由附图标号2标识的根据本公开的电外科系统。电外科系统2包含电外科钳10和电外科发生器40。电外科钳10在本文中展示和描述为基于轴的手动装置。然而,根据本公开可使用任何其它合适的电外科钳,无论是基于轴的、止血钳式的、手动的、部分电动的、完全电动的、机器人等。显然,不同连接和考虑因素适用于每一特定类型的器械;然而,本公开关于密封组织的方面和特征与关于任何合适的器械的方面和特征通常保持一致。
34.继续图1,钳子10包含轴12、外壳20、手柄组件22、触发器组件25、旋转组件28和末端执行器组件100。轴12具有配置成机械接合末端执行器组件100的远端部分16和机械接合外壳20的近端部分14。电缆34将钳子10耦合到电外科发生器40,以用于在发生器40与钳子10之间传输能量和控制信号。电缆34容纳多根导线56,所述导线56在手柄组件22内和/或在轴12中内部地分为导线56a到56c,其将末端执行器组件100、激活开关30和/或发生器40彼此电互连。
35.手柄组件22包含可移动手柄24和固定手柄26。固定手柄26与外壳20整体地相关联,且可移动手柄24可相对于固定手柄26移动。可移动手柄24最终连接到驱动组件70,所述驱动组件70一起机械地协作以赋予末端执行器组件100的钳口部件110、120中的一个或两个在间隔开的位置与接近位置之间相对于另一个的运动,以抓取其间的组织。如图1中所展示,可移动手柄24最初与固定手柄26间隔开,且对应地,末端执行器钳口部件110、120安置在间隔开的位置中(还参见图2a)。可移动手柄24可从这一初始位置移动到对应于钳口部件110、120的一个或多个接近位置的一或多个压缩位置(参见图2b)。
36.驱动组件70可配置成调节分别施加到在钳口部件110、120的表面112与122之间抓取的组织的夹持力。更确切地说,手柄组件22和/或闩锁组件27可与驱动组件70一起配置成使得钳口部件110、120将特定夹持力或特定的夹持力范围内的夹持力分别施加到在钳口部件110、120的表面112与122之间抓取的组织。这可以手动地实现,例如经由将可移动手柄24从初始位置移动到特定压缩位置(或多个位置),例如完全压缩位置;经由机械闩锁,例如,其中闩锁组件27配置成将可移动手柄24闩锁在特定位置(或多个位置);经由具有基于反馈的控制的电动致动器,例如,经由将电动机控制的致动器驱动或反转到特定位置(或多个位置);和/或经由任何其它合适的机构。在上文详述的任何配置或任何其它合适的配置中,驱动组件70可包含一或多个无源调节组件(例如弹簧、弹性特征等)和/或有源调节组件(例如
电动机、手动驱动器等)。
37.用作驱动组件70的合适机构或与所述驱动组件70结合以用于夹持力控制的合适机构包含美国专利第5,776,130号;第7,766,910号;第7,771,426号;和第8,226,650号;和/或美国专利申请公开案第2009/0292283号;第2012/0172873号;和第2012/0184988号中所描述的那些机构,所述所有专利的全部内容在此以引用的方式并入本文中。也可提供用于将特定夹持力或特定夹持力范围内的夹持力施加到在钳口部件110与120之间抓取的组织的其它合适机构。当在特定夹持力或特定夹持力范围内的夹持力下,在钳口部件110与120之间抓取组织的情况下,可将能量分别供应到钳口部件110、120的任一或两个组织接触表面112、122,以例如经由激活开关30的激活来密封组织。
38.在沿着钳口部件110、120的长度的中点处测量到的钳口夹持力可在(或钳口力范围可为)约7.0lbf到约11.0lbf;在其它方面中,在约8.0lbf到约10.0lbf;且在又其它方面中,在约8.5lbf到约9.5lbf的范围内。
39.可提供闩锁组件27以用于相对于固定手柄26将可移动手柄24选择性地锁定在初始位置与压缩位置之间的各个位置处,以在枢转期间将钳口部件110、120对应地锁定在各个不同位置(例如,一或多个接近位置)处。旋转组件28可在任一方向上旋转,以相对于外壳20类似地旋转轴12和末端执行器组件100。
40.还参看图2a和图2b,末端执行器组件100展示为附接在轴12的远端部分16处且包含相对的钳口部件110和120。每一钳口部件110、120分别包含导电组织接触表面112、122,所述组织接触表面协作以抓取其间(例如在钳口部件110、120的一或多个接近位置中)的组织,且有助于经由在其间传导来自发生器40的能量来密封所抓取组织。更确切地说,组织接触表面112、122例如经由导线56a、56b电耦合到发生器40,且配置成激励到不同电势以使得由发生器40提供的射频(rf)电外科能量能够在组织接触表面112与122之间传导且通过在其间抓取的组织,以密封组织。组织接触表面112、122可由固定到钳口部件110、120的导电板限定,可由钳口部件110、120本身的表面限定,可经由将材料沉积到钳口部件110、120上而形成,或可以任何其它合适的方式限定和/或形成。
41.任一或两个钳口部件110、120还可以包含一或多个止动部件124(图2a),所述一或多个止动部件124安置在任一或两个组织接触表面112、122上或以其它方式与任一或两个组织接触表面112、122相关联,以在钳口部件110、120安置在完全接近位置处时维持组织接触表面112与122之间的最小间隙距离,从而防止电短路。止动部件124可以是绝缘的、部分绝缘的和/或与任一或两个组织接触表面112、122电隔离。在各方面中,在钳口部件110、120的接近位置处,希望将间隙距离维持在合适的间隙距离范围内以确保一致且有效的组织密封。间隙距离可由止动部件124、可移动手柄24、闩锁组件27和/或驱动组件70控制,且在各方面中,可为约0.001英寸到约0.010英寸;在其它方面中,为约0.001英寸到约0.008英寸;且在又其它方面中,为约0.001英寸到约0.006英寸。还涵盖其它合适的间隙距离范围。间隙距离可确定为组织接触表面112与122之间在其任意点处的最大间隙距离。
42.激活开关30安置在外壳20上且经由导线56c耦合在发生器40和/或组织接触表面112、122之间或以其它方式耦合到发生器40和/或组织接触表面112、122。激活开关30可选择性地激活以启动将能量从发生器40分别供应到末端执行器组件100的钳口部件110、120的组织接触表面112、122。更确切地说,激活开关30的按下由发生器40识别为例如电阻降,
以向发生器40发信号以启动组织密封,例如向钳口部件110、120供应能量。
43.末端执行器组件100设计为双侧组件,例如,其中钳口部件110和钳口部件120两者均可围绕枢轴19相对于彼此且相对于轴12移动。然而,末端执行器组件100可替代地配置为单侧组件,例如,其中钳口部件110、120中的一个相对于轴12固定,且另一钳口部件110、120可围绕枢轴19相对于轴12和固定的钳口部件移动。
44.在一些配置中,刀组件(未展示)设置在轴12内且刀沟道115限定在一个或两个钳口部件110、120内以允许刀片(未展示)通过其往复运动(例如,经由触发器组件25的致动),以机械地切割在钳口部件110与120之间抓取的组织。在各方面中,刀片可激励以实现基于动态能量的组织切割。替代地,末端执行器组件100可包含基于静态能量的组织切割器(未展示),例如安置在钳口部件110、120中的一个中或其中。无论是静态的还是动态的,基于能量的切割器可配置成向组织供应任何合适的能量,例如rf、微波、红外线、光、超声波、热等,以用于基于能量的组织切割。可在组织密封之后经由触发器组件25自动地、经由开关30的不同(或另外)激活、经由单独的致动按钮、经由脚踏开关(未展示)或以任何其它合适的方式启动用于组织切割的能量激活。
45.转向图3,展示通常由附图标号1000标识的根据本公开提供的机器人外科器械。省略了与本公开的理解无密切关系的机器人外科器械1000的方面和特征,以避免在不必要的细节中混淆本公开的方面和特征。
46.机器人外科器械1000包含多个机器人臂1002、1003;控制装置1004;和与控制装置1004耦合的操作控制台1005。操作控制台1005可包含:可特别设置成显示三维图像的显示装置1006;和手动输入装置1007、1008,外科医生借助于手动输入装置1007、1008能够在操作模式下远程操纵机器人臂1002、1003。机器人外科器械1000可配置成用于躺在患者床台1012上的患者1013,以便以微创方式进行处理。机器人外科器械1000可还包含或能够存取数据库1014,特别是耦合到控制装置1004的数据库,其中存储例如来自患者1013的术前数据和/或解剖图集。
47.机器人臂1002、1003中的每一个可包含通过接头连接的多个部件,和附接装置1009、1011,例如末端执行器组件1100、1200可分别附接到附接装置1009、1011。举例来说,末端执行器组件1100可类似于且包含末端执行器组件100(图1到图2b)的特征中的任一个,且除以机器人致动和控制方式以外,与机械臂1002一起如上文关于钳子10详述类似地起作用。也涵盖用于耦合到附接装置1009的其它合适的末端执行器组件。末端执行器组件1200可为任何末端执行器组件,例如外科摄像机、其它外科工具等。机器人臂1002、1003和末端执行器组件1100、1200可由连接到控制装置1004的电驱动器(例如,电动机)驱动。控制装置1004(例如,计算机)可配置成以使得机器人臂1002、1003、其附接装置1009、1011和末端执行器组件1100、1200分别根据来自手动输入装置1007、1008的对应输入来执行所要移动和/或功能的方式而特别借助于计算机程序来激活电动机。控制装置1004还可以调节机器人臂1002、1003和/或电动机的移动的这种方式配置。
48.参看图4,发生器40可配置为与钳子10(图1)、机器人外科系统1000(图3)和/或任何其它合适的外科器械或系统一起使用。发生器40包含传感器电路系统42、控制器44、高压dc电源(“hvps”)47和rf输出级48。hvps 47向rf输出级48提供高压dc电源,rf输出级48将高压dc电源转换成rf能量以传递到末端执行器组件,例如末端执行器组件100的分别的钳口
部件110、120的组织接触表面112、122(图1到图2b)。确切地说,rf输出级48产生高频rf能量的正弦波形。rf输出级48配置成根据特定操作模式产生具有各种占空比、峰值电压、波峰因数和其它参数的多个波形。
49.控制器44包含可操作地连接到存储器46的微处理器45,所述存储器46可为易失性类型的存储器(例如,ram)和/或非易失性类型的存储器(例如,闪存媒体、磁盘媒体等)。微处理器45可操作地连接到hvps 47和/或rf输出级48,从而允许微处理器45例如根据从传感器电路系统42接收到的反馈来控制发生器40的输出。传感器电路系统42可操作地耦合到向/从组织接触表面112、122(图1到2b)供应能量的导线56a、56b。根据导线56a、56b(且更确切地说,沿其传输的信号),传感器电路系统42可确定一或多个参数,例如组织阻抗、输出电流和/或电压等。传感器电路系统42例如基于所感测参数向控制器44提供反馈,控制器44依次选择能量传递算法、修改能量传递算法和/或基于其调整能量传递参数。传感器电路系统42或控制器44还可监视导线56c以确定激活(和/或去激活)开关30(图1),以响应于此,基于其启动(或终止)能量供应。
50.图5说明通常由附图标号300标识的所展示的根据本公开提供的另一末端执行器组件。末端执行器组件300类似于末端执行器组件100(图1到图2b)且可包含其特征中的任一个。末端执行器组件300可与钳子10(图1)、机器人外科系统1000(图3)或任何其它合适的外科器械或系统一起使用。末端执行器组件300包含第一和第二钳口部件310、320,每一钳口部件包含相应的导电组织接触表面312、322。任一或两个钳口部件310、320可在间隔开的位置与一或多个接近位置之间相对于另一个移动,以在组织接触表面312、322之间抓取组织。导线314、324将组织接触表面312、322电耦合到能量源,例如发生器400(图7),以用于使rf能量在组织接触表面312与322之间传导且通过在其间抓取的组织,以密封组织。
51.末端执行器组件300的任一或两个钳口部件310、320还包含定位在其上或其中的传感器316、326。传感器316、326可为配置成感测一或多个参数、可感测相似或不同参数,和/或可独立或共同地操作的任何合适的传感器。传感器316、326可配置为例如:电传感器,其例如配置成感测阻抗、电流、功率、电压等;光学传感器,其例如配置成感测末端执行器组件300、组织和/或周围环境的一或多种光学特性,例如颜色、清晰度、透明度等;距离(直线或角度)传感器,其配置成确定钳口部件310、320和/或其它组件之间的直线距离或角度;接近传感器,例如霍尔效应传感器,其配置成确定钳口部件310、320和/或其它组件之间的距离,以例如能够确定物理组织特性(直径、质量、密度、可压缩性等);粒子传感器,例如电离检测器或光电检测器,其配置成检测烟雾和/或其它粒子;电子鼻传感器,其配置成以电子方式感测组织和/或周围环境的一或多种基于气味的特性;化学传感器,例如分子传感器、气相色谱仪等,其配置成感测组织和/或周围环境的一或多种化学特性;湿度传感器;压力/力传感器;密度传感器;温度和/或热传感器;超声波传感器;音频传感器;等。此外,可利用传感器的组合,例如两个或更多个上述或其它合适的传感器。
52.替代地,如图6所展示,一或多个传感器336(其配置成类似于上述传感器中的任一个或任何其它合适的传感器)可安置在与末端执行器组件300分离的装置330上,且配置成感测末端执行器组件300、与其接触(由此抓取)的组织和/或周围环境的一或多种特性。在各方面中,传感器336为可见图像外科摄像机,所述摄像机配置成感测钳口部件310与320之间的位置和/或角度。传感器336可替代地配置为红外摄像机、热摄像机或其它合适的摄像
机,或其它传感器。
53.参看图5到图7,根据本公开提供的另一发生器400类似于发生器40(图4)且可包含其特征中的任一个。发生器400配置为与末端执行器组件300一起使用,且与发生器40(图4)类似地包含传感器电路系统422、控制器424(包含微处理器425和存储器426)、hvps 427和rf输出级428。发生器400配置成经由导线314、324向末端执行器组件300供应能量。传感器电路系统422可操作地耦合到导线318、328(和/或到传感器336的导线或其它有线或无线连接),且由此配置成从传感器316、326(和传感器336)接收感测参数。传感器电路系统422例如基于所感测参数向控制器424提供反馈,控制器424依次选择能量传递算法、修改能量传递算法和/或基于其来调整能量传递参数。
54.在一般参看图1到图7的情况下,通过控制机械和电气因素来实现密封组织,例如血管、包含血管的组织、其它组织结构等。更确切地说,关于机械因素,通过控制在其间抓取组织的相对导电表面之间的间隙距离和通过控制施加到所抓取组织的夹持力来促进实现有效且一致的组织密封。关于电气因素,控制施加到所夹持组织的电外科能量的强度、频率和持续时间对于密封组织而言是重要的电气考虑因素。
55.控制与某些组织的组织密封相关联的机械因素,例如一些组织类型、状况和/或组织大小(例如,小于或等于约7.0mm的血管直径或组织结构直径)、电外科器械(诸如上文详述的器械、末端执行器组件或系统中的任一个)本身可能够将机械因素控制在合适范围内。更确切地说,器械可配置成在钳口部件的接近位置处将夹持力控制在适当的夹持力范围内(诸如上文详述的那些夹持力范围),且将间隙距离控制在适当的间隙距离范围内(诸如上文详述的那些间隙距离范围)。在这种情况下,可针对能量的受控传递实施组织密封算法,以实现有效且一致的组织密封。
56.控制其它组织的机械因素,例如某些组织类型、状况和/或组织大小(例如,等于或大于约7.1mm的血管直径或组织结构直径)可能无法仅通过电外科器械机械配置而一致且有效地完成。确切地说,在这种情况下,可能有必要(例如通过实施预处理算法)对组织进行预处理,以便收缩组织,使组织更可压缩,或以其它方式修改组织,使得电外科器械能够实现其适当范围内的夹持力和/或间隙距离。替代地或另外,预处理可以使得适用于密封组织的夹持力和/或间隙距离范围更改(例如放大)为能够通过作用于预处理的组织的电外科器械来实现的范围的这种方式来修改组织。取决于手术条件、组织类型、组织状况、组织大小等,在其它情况下也可能需要预处理(无论是否可充分控制机械因素)。一旦完成预处理算法和/或确定将完成预处理,就可针对能量的受控传递实施组织密封算法,以实现有效且一致的组织密封。
57.确定组织是否可能需要预处理以促进组织密封可基于用户在手术期间的手动输入,例如激活器械上的开关、发生器上的按钮等,或在此之前基于例如获得的术前信息,诸如患者数据、将执行的手术等。替代地或另外,确定组织是否可能需要预处理以促进组织密封可基于所感测参数,例如根据以上详述的各方面中的任一个或以任何其它合适的方式来自传感器和/或传感器电路系统。
58.举例来说,距离传感器、接近传感器和/或外科摄像机可用于能够基于钳口部件之间的距离和/或角度、基于所施加的夹持力和/或基于与耦合到钳口部件的其它机械组件相关联的运动、位置和/或力来确定组织的大小。更确切地说,可如在2009年4月7日作为美国
专利申请第12/419,735号提交的标题为“钳口闭合检测系统(jaw closure detection system)”的美国专利第8,357,158号中所详述来确定钳口角度,所述申请的全部内容在此以引用的方式并入本文中;更确切地说,可如在2017年1月9日作为美国专利申请第15/401,227号提交的标题为“具有传感器的外科器械(surgical instrument with sensor)”的美国专利第10,695,123号中所详述来确定钳口压力/力,所述申请的全部内容在此以引用的方式并入本文中;和更确切地说,可如在2017年1月30日作为美国专利申请第15/418,809号提交的标题为“用于电外科钳的钳口孔径位置传感器(jaw aperture position sensor for electrosurgical forceps)”的美国专利申请公开案第2017/0215944号中所详述来确定钳口孔径/角度,所述申请的全部内容在此以引用的方式并入本文中。在已确定的组织直径(例如,基于钳口角度、钳口压力/力等)或其它已确定的组织特性超过阈值上限或阈值下限(取决于所讨论的特定特性)时,可确定需要预处理;另一方面,当已确定的特性没有超过阈值限制时,可确定不需要预处理。
59.作为另一实例,例如可经由通过感测组织的电学特性、组织的物理特性、视觉识别、化学分析、光学分析、其组合和/或以任何其它合适的方式来进行组织类型或状况的确定。当识别到某些类型的组织或组织状况时,可确定需要预处理;另一方面,当识别到其它类型的组织或状况时,可确定不需要预处理。
60.任何或所有以上组织类型、状况和/或组织大小确定可通过使用存储或训练数据的一或多种算法、设定点、查找表、机器学习程序等(与传感器数据一起或不与这种传感器数据一起)来促进,所述存储或训练数据经由数学模拟、利用机器学习、使用理论公式、其组合等而以实验方式获得。同样地,确定识别到的组织特性、类型、状况和/或组织大小是否需要预处理可通过使用存储或训练数据的一或多种算法、设定点、查找表、机器学习程序等来促进,所述存储或训练数据经由数学模拟、利用机器学习、使用理论公式、其组合等而以实验方式获得。
61.还可响应于在不进行预处理的情况下尝试密封组织期间的发生器错误(诸如例如指示无法密封所抓取组织且用户应重新抓取组织的警报)来启动确定对预处理的需要。在这种情况下,激活开关的后续激活(进行或不进行重新抓取)可在实施密封算法之前启动预处理算法。
62.转到图8,根据本公开提供且展示通常由附图标号800标识的使用电外科器械密封组织的方法。当激活电外科器械时,例如当激活开关30由在钳口部件110与120(图1)之间抓取的组织激活时,方法800开始于810。
63.当激活电外科器械时,在820处确定是否将执行预处理。可基于(如上文详述)手动输入;基于组织类型、状况和/或组织大小,例如使用传感器反馈;或以任何其它合适的方式来确定是否将执行预处理。在820处确定将执行预处理(在820处为“是”)的情况下,在830处启动预处理算法。作为820处的确定是否将执行预处理的替代方案,所述方法可从810处的激活跳到830处的启动预处理算法。可例如在所有情况下或基于与器械或发生器相关联的预处理设置的激活自动地执行预处理。
64.预处理算法可为电压控制算法或任何其它合适的算法,例如功率控制、阻抗控制、电流控制、时间控制、其组合等。预处理算法可继续进行直到确定预处理算法已结束,这可以是基于阻抗的、基于时间的、基于电压的、基于功率的、基于电流的和/或基于传感器反馈
的(例如,其中达到阈值大小,达到阈值温度,达到阈值颜色等)。在利用多个结束指示符的情况下,预处理算法可在达到第一时间指示符时、仅在达到所有指示符之后或以任何其它合适的方式结束。
65.更确切地说,预处理算法可为电压控制的,即在初始电压下提供能量且根据电压-时间图,例如根据线性电压斜坡、多项式函数或以任何其它合适的方式修改电压。举例来说,初始电压可以从约50v开始且以每秒约5v的速率线性斜升。在其它方面中,初始电压可以从约25v开始且以每秒约20v的速率线性斜升。在各方面中,初始电压可以从约20v到约80v,和/或斜坡可以从每秒约3v到每秒约25v。还涵盖其它初始电压和/或电压斜坡。举例来说,取决于钳口部件的大小和/或配置,可能需要修改适当电压。
66.可例如在组织的阻抗在初始阻抗和结束阻抗之间发生预定变化之后确定预处理算法的结束。在各方面中,预定阻抗变化可高达约100欧姆;在其它方面中,高达约150欧姆,且在又其它方面中,高达约200欧姆。如上所述,预处理算法的结束可另外或替代地基于传感器反馈,诸如例如,当达到适当间隙距离范围内的间隙距离时、当达到适当夹持力范围内的夹持力时、在预定时间周期结束时等。在840处,例如根据上述结束确定中的任一个或多个来确定预处理算法是否已完成。如果确定预处理算法已完成(在840处为“是”),那么方法进行到850,其中启动组织密封算法。如果确定预处理算法尚未完成(在840处为“否”),那么在850处继续运行预处理算法直到确定结束。
67.在达到预处理算法的结束时(在840处为“是”)的情况下,或在确定将不执行预处理(在820处为“否”)的情况下,所述方法进行到860,其中启动组织密封算法。在各方面中,在预处理算法与组织密封算法之间可出现延迟周期,例如从约10毫秒到约2秒,但也涵盖其它延迟周期。组织密封算法可独立于预处理算法且基于不同或相同的控制方案。举例来说,组织密封算法可为阻抗控制的或可利用任何其它合适的控制,例如电压控制、功率控制、电流控制、时间控制、其组合等。组织密封算法可包含利用不同控制和/或不同参数的多个阶段。示例性组织密封算法在下文详述,但可利用任何其它合适的组织密封算法。
68.组织密封算法可从阻抗感测阶段开始,在这期间,所述算法用询问阻抗感测脉冲来感测组织阻抗。在这一阶段期间,在不明显地改变组织的情况下确定组织阻抗。在这一询问或错误检查阶段期间,提供恒定功率以检查短路或开路,以便确定是否抓取组织。如果没有检测到短路或开路,那么算法继续进行。如果检测到短路或开路,那么返回错误。在各方面中,在已执行预处理的情况下可以跳过这一询问阶段;在各方面中,这一询问阶段可在预处理开始时执行,作为在组织密封算法开始时执行的替代方案或补充。
69.如果没有检测到短路或开路,那么算法以初始输出水平或根据初始控制启动向组织供应电外科能量,例如随时间线性地传递电流以加热组织。在这一能量输出期间,确定是否出现组织反应(例如,达到组织流体的沸点),作为最小阻抗值和阻抗的预定上升的函数。接着产生作为所测量阻抗和基于组织反应确定的所要变化率的函数的目标阻抗轨迹(例如,包含多个目标阻抗值),且调整输出能量以使组织阻抗与对应目标阻抗值大体上匹配,由此遵循目标阻抗轨迹。可控制输出能量直到达到终止阻抗值,能量在所述点处终止。在指示组织密封完成之前,可能出现冷却周期,例如用听觉和/或视觉音调。
70.在一些方面,并非或除在组织密封算法之前实施预处理算法以外,组织密封算法可在预定的、基于所感测反馈的或用户输入点处中断,且可接着在恢复组织密封算法完成
之前进行预处理算法。在组织密封算法包含多个阶段的方面中,预处理算法可在其任何合适的阶段之间执行。在又其它方面中,预处理算法可另外或替代地在组织密封算法之后执行。
71.根据本公开的适用的更详细的组织密封算法可在例如以下中找到:标题为“用于组织密封的系统和方法(system and method for tissue sealing)”且在2010年11月29日作为美国专利申请第12/995,042号提交的美国专利第8,920,421号,所述申请的全部内容在此以引用的方式并入本文中;和标题为“用于组织密封系统和方法”且在2009年2月23日作为美国专利申请第12/391,036号提交的美国专利第8,147,485号,所述申请的全部内容在此以引用的方式并入本文中。
72.参看图9a到图9c,分别详述了密封对始终预处理配置、基于传感器的预处理配置和基于用户输入的预处理配置特定的组织的方法。然而,还涵盖其它合适的配置。不详细地重复上文或本文中以其它方式详述的方面和特征以避免不必要的重复。
73.转到图9a,关于始终预处理配置,方法910在激活时(例如当激活开关30由在钳口部件110与120(图1)之间抓取的组织激活时)开始于912。方法继续到914,其中运行预处理算法,且在预处理算法期间,在916处确定是否存在任何错误状况,例如是否检测到短路,其中不存在阻抗变化或阻抗变化不充分等。如果检测到错误状况(在916处为“是”),那么终止预处理算法且在924处输出警报。如果没有检测到错误状况(在916处为“否”),那么所述方法继续进行。此外,在运行预处理算法期间,在918处,例如以上文详述的任何方式或以任何其它合适的方式来确定预处理是否完成。如果预处理未完成,那么预处理继续进行,且连续或定期确定预处理是否完成(在918处)和/或是否检测到错误状况(在916处)。换句话说,916和918在运行预处理算法期间同时、连续或以任何其它合适的方式重复。
74.当预处理完成时(在918处为“是”),在919处建立延迟,然后在920处启动组织密封算法。组织密封算法继续进行直到确定密封完成。如果完成(在922处为“是”),那么所述方法在923处结束。如果未完成(在922处为“否”),或当检测到错误状况时,终止组织密封算法且在924处输出警报。
75.参看图9b,关于基于传感器的预处理配置,方法930在激活时(例如当激活开关30由在钳口部件110与120(图1)之间抓取的组织激活时)开始于932。方法继续到933,其中例如基于(诸如例如,上文详述)传感器反馈确定是否将执行预处理。如果确定需要预处理(在933处为“是”),方法进行到934,其中运行预处理算法,且在预处理算法期间,在936处确定是否存在任何错误状况。如果检测到错误状况(在936处为“是”),那么终止预处理算法且在944处输出警报。如果没有检测到错误状况(在936处为“否”),那么所述方法继续进行。此外,在运行预处理算法期间,在938处确定预处理是否完成。如果预处理未完成,那么继续进行预处理,且连续或定期确定预处理是否完成(在938处)和/或是否检测到错误状况(在936处)。
76.当预处理完成时(在938处为“是”),在939处建立延迟,然后在940处启动组织密封算法。组织密封算法继续进行直到确定密封完成。如果完成(在942处为“是”),那么所述方法在943处结束。如果未完成(在942处为“否”),或当检测到错误状况时,终止组织密封算法且在944处输出警报。
77.参看图9c,关于基于用户输入的预处理配置,方法950在激活时(例如当激活开关
30由在钳口部件110与120(图1)之间抓取的组织激活时)开始于952。方法继续到953,其中确定用户是否已选择预处理。如果选择了预处理(在953处为“是”),那么方法进行到954,其中运行预处理算法,且在预处理算法期间,在956处确定是否存在任何错误状况。如果检测到错误状况(在956处为“是”),那么终止预处理算法且在964处输出警报。如果没有检测到错误状况(在956处为“否”),那么所述方法继续进行。此外,在运行预处理算法期间,在958处确定预处理是否完成。如果预处理未完成,那么继续进行预处理,且连续或定期确定预处理是否完成(在958处)和/或是否检测到错误状况(在956处)。
78.当预处理完成时(在958处为“是”),在959处建立延迟,然后在960处启动组织密封算法。组织密封算法继续进行直到确定密封完成。如果完成(在962处为“是”),那么所述方法在963处结束。如果未完成(在962处为“否”),或当检测到错误状况时,终止组织密封算法且在964处输出警报。
79.参看图10,展示与本公开的算法相比使用控制算法密封的各种容器大小的爆破压力的实验结果的图。所指示容器大小为:小“s”,直径可高达约3.0mm;中等“m”,直径为从约3.1mm到约5.0mm;大“l”,从约5.1mm到约7.0mm;和特大“xl”,从约7.1mm到约10.0mm。爆破压力以单位为mmhg显示。提供控制算法作为(例如,根据本公开的)组织密封算法,而不使用预处理算法。vpt50算法包含与控制算法相同的组织密封算法,但在此之前执行预处理算法。通过查看这些实验结果可了解:与控制算法相比,使用vpt50算法增加了爆破压力水平(特别是对于较大和超大容器)以及95%的置信区间水平。
80.虽然已在图式中展示本公开的若干方面,但不希望将本公开限于这些方面,因为希望本公开与本领域所允许的范围一样广泛且应以同样的方式阅读本说明书。因此,上文描述不应解释为限制性的,而仅是作为特定配置的例证。所属领域的技术人员将设想在本文所附的权利要求书的范围和精神内的其它修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1