具有云存储功能的智能化脊柱侧凸康复机器人的制作方法
1.本发明涉及脊柱侧凸智能康复机器人技术领域,更具体地说,本发明涉及具有云存储功能的智能化脊柱侧凸康复机器人。
背景技术:
2.现有的脊柱侧凸治疗设备中,推力臂的自由度通常不够,或者采用手动调整位置等方式,限制了推力的组合情况,也增加了医护人员的工作量;脊柱侧凸/脊柱侧弯是指脊柱的一个或数个节段侧方弯曲,或伴有椎体旋转的脊柱三维畸形,包括冠状面、矢状面和水平面上的序列异常;正常人的脊柱从后面看应该是一条直线,并且躯干两侧对称;轻度的脊柱侧凸通常没有明显的不适,外观上也看不到明显的躯体畸形;较重的脊柱侧凸则会影响婴幼儿或青少年的生长发育,使身体变形,严重者可以影响心肺功能、甚至累及脊髓,造成瘫痪;轻度的脊柱侧凸可以观察,中度的脊柱侧凸需要及时的康复治疗,而严重者则需要手术治疗;
3.脊柱侧凸是常发于青少年群体,国际上有2%~3%的发病率;在中国,脊柱侧凸的发病率高达5%;临床上常用cobb角来衡量脊柱侧凸的严重程度,当脊柱侧凸在一定的严重程度时(cobb角大于20度,且小于40度),宜采用保守治疗,常用一定的手段使脊柱侧凸处因受力而缓解侧凸程度并维持一定时间,使用持续推力或间歇推力,均能起到一定的治疗效果;现有的方案(如cn 112168452 a一种脊柱侧凸三维推力矫正装置及其应用、cn 215081530 u一种脊柱侧弯治疗用辅助装置、cn 114041910 a一种人工智能型脊柱侧弯治疗仪及其使用方法、cn 109172082 a一种脊柱侧弯三维矫正训练架、cn 113974937 a一种脊柱侧弯矫正装置、cn 213310693 u一种辅助脊柱侧弯治疗的仪器、cn 210990977 u一种用于脊柱侧弯矫形的定点加压装置)中,常采用在治疗床或治疗设备框架中,先让患者躺在床上或坐在椅子上,并将身体的部分部位(如骨盆、腋窝等)进行固定,再利用矫正推力臂,以人工、电动、气动为动力源,对脊柱侧凸的不同点施力,从而使侧凸程度缓解以得到治疗的效果,并在治疗结束后,辅以支具,以便患者居家使用;在现有设备中,常沿冠状面布置2~4点推力臂,即从患者的左右利用推力臂施力进行治疗;例如,在凸起侧放置一个推力臂,在凹陷侧放置二个推力臂,即可达到施力效果;如果患者出现反方向的脊柱侧凸情况,则将患者更换一个方向,仍可采用类似的三点施力方案,进行治疗;
4.现有技术存在的问题包括:
5.c型侧凸治疗时,三点受力即能达到较好治疗效果;但针对s型侧凸,仅三个推力臂不足以同时将两处甚至多处侧凸进行治疗;因此,需要更多个推力臂,才能既满足c型侧凸又能满足s型侧凸的患者情况;同时,由于脊柱侧凸不仅限于冠状面的侧凸,若推力臂安装在固定的框架上,或仅提供升降、左右移动等少量的自由度时,无法针对三维空间中的脊柱侧凸实施更好的推力方案;即需要更科学的方法,让推力臂的施力方向,提供更多的自由度,既可以上下升降,还可以沿垂直轴旋转;使用多自由度的推力矫正装置,已有的方案中,要么矫正装置的方向固定,自由度有限;要么矫正装置需要人工调节其方向,以便满足不同
方向施力的需求;这种全部手动或部分手动调节的过程,势必费时繁琐才能达到效果;现有的治疗设备中,推力臂的自由度不够,甚至采用手动调整位置等方式,限制了推力的组合情况,也增加了医护人员的工作量;需要采用自动化程度更高的多自由度机器人为脊柱侧凸患者提供康复治疗方案;采用自动化的调节过程,才能提高方案的操作效率;
6.另外,患者坐在椅子上进行脊柱侧凸治疗时,为了更好的配合治疗,需要将患者的骨盆进行固定;另外,部分患者的骨盆存在左右、前后甚至更多角度的倾斜情况,因此需要在固定患者骨盆的情况下,还需要能让座椅倾斜,以便让患者的骨盆调整到正常解剖位后再对患者进行脊椎侧凸治疗,以达到更好的矫正治疗效果;现有的方案中,椅子仅提供用户的骨盆固定作用,或左右倾斜的功能;实际上,骨盆的倾斜不一定局限于左右方向,可能存在任意方向的倾斜;
7.现有的治疗设备中,限制了推力的组合情况,也增加了医护人员的工作量;需要采用自动化程度更高的多自由度机器人为脊柱侧凸患者提供康复治疗方案;治疗过程中,部分临床工作者,还需要在患者的背部进行检测,以便获得脊柱侧凸的矫正情况;因此,还需要治疗设备允许患者祼露后背,并允许临床工作者有空间去操作影像设备监测cobb角等脊柱侧凸参数;现有的床式方案、环式方案,则不能很好的满足这一临床需求;
8.现有的方案中,患者治疗时,不知道治疗过程,或者不知道矫正到什么形态;若可以通过视觉或听觉上知晓正在进行的治疗阶段,以及矫正后的情况,则有利于从心理上增强患者的治疗效果;
9.另外,患者治疗过程中,主要由医务人员进行监控陪同整个治疗过程,在出现紧急情况时做出相应的处置,增加了医务人员的工作量;另一项主要原因是相应的健康参数没有得到监测,如果能够同步检测患者的脑电、脉率、血氧饱和度、心率变异性、光神经快信号等生理参数,则能为身体意外情况的客观评估,提供数据来源;同时,如能够进行生理参数监测则能够客观监测患者的治疗过程中的感受,为治疗方案的及时调整,提升治疗效果;
10.脊椎侧凸的治疗是一个综合工程,一部分患者需要手术治疗,一部分患者需要居家继续治疗或佩戴支具;然而,支具的设计,往往依赖于临床工作者的经验;若能利用脊柱侧凸康复机器人治疗过程中治疗达到较佳效果时的受力组合作为参考,则有望使支具的设计更为科学合理;但脊柱侧凸康复机器人施力组合数据,尚没有适当的方法传递到支具设计师的手中;需要采用自动化程度更高的多自由度机器人为脊柱侧凸患者提供康复治疗方案;因此,有必要提出具有云存储功能的智能化脊柱侧凸康复机器人,至少部分地解决现有技术中存在的问题。
技术实现要素:
11.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明;本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
12.为至少部分地解决上述问题,本发明提供了一种具有云存储功能的智能化脊柱侧凸康复机器人,包括:
13.头部支撑脑电及近红外监测模块,用于在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并监测脊柱侧凸患者脑电、脉搏、血氧、光神经快信号等生理信号,辅助调校矫正施
力;
14.脊柱侧凸体态检测模块,用于检测脊柱侧凸患者的脊柱侧凸状态及体型状态;
15.特定性参数云分析模块,用于将脊柱侧凸体态检测结果及医疗检查数据传输到云存储分析系统,自动生成脊柱侧凸患者特定适应性参数;
16.程控及执行机器人模块,用于将特定个体化参数导入脊柱侧凸康复控制程序,控制康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正。
17.优选的,所述头部支撑脑电及近红外监测模块包括:
18.头部支撑悬挂升降子模块,用于通过头部牵引装置在在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并通过头部牵引装置的牵引力传感器采集牵引力数据;
19.脑电信号采集电极子模块,用于通过信号采集电极采集脊柱侧凸患者脑电信号;
20.近红外光监测传感器模块,用于通过光学传感器采集脊柱侧凸患者脉搏、血氧饱和度、光神经快信号;
21.电极及近红外光监测传感器连接监测跟踪子模块,用于根据脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号辅助分析治疗过程是否适当,紧急状况及脊柱侧凸患者无法呼救时的紧急状况监护,医生通过脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号监控脊柱侧凸患者状态,进一步调校矫正施力。
22.优选的,所述脊柱侧凸体态检测模块包括:
23.脊柱侧凸状态检测子模块,用于读取脊柱侧凸医疗影像,辅助医生检测脊柱侧凸状态;
24.患者体型状态检测子模块,用于对脊柱侧凸患者的体型状态进行检测,检测患者身高、体重、bmi、皮脂厚度及三围数据;
25.康复状态监控检测子模块,用于对脊柱侧凸患者的治疗状态进行监控并检测治疗效果。
26.优选的,所述特定性参数云分析模块包括:
27.云平台及数据传输子模块,用于将脊柱侧凸体态检测数据上传到云端,为患者自身及其他患者的脊柱侧凸康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据;
28.医疗检查数据存储子模块,用于对医疗检查数据进行传输,并将脊柱侧凸体态检测数据和医疗检查数据进行云端存储;
29.云端参数分析存储子模块,用于对脊柱侧凸体态检测数据和医疗检查数据进行云分析,自动生成脊柱侧凸患者特定适应性参数。
30.优选的,所述程控及执行机器人模块包括:
31.云端数据导入程序子模块,用于将特定个体化参数及云存储数据导入控制单元;控制单元包括:存储单元、网络发送单元和工控卡组;参数数据通过网络发送单元导入控制单元并存储在本地存储单元;
32.侧凸康复程序控制子模块,用于读取本地存储单元的特定个体化参数并将特定个体化参数输入工控卡组侧凸康复程序,生成特定个体化侧凸康复程序;
33.控制与机器人执行子模块,用于通过特定个体化侧凸康复程序,控制脊柱侧凸康复机器人执行脊柱侧凸康复治疗过程,启动脊柱侧凸康复控制程序,控制脊柱侧凸康复机
器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正。
34.优选的,所述控制与机器人执行子模块包括:
35.脊柱侧凸矫正机构,用于为患者脊柱侧凸矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;
36.多倾角骨盆固定机构,用于自动固定患者的骨盆,调整患者的骨盆位置,并进行多倾斜角度的调节;
37.承载框架及护手机构,用于脊柱侧凸康复过程护手架,以便让患者在治疗过程中放置双手,缓解疲劳以坚持治疗过程所需时间;
38.双面触屏显示机构,用于通过朝向脊柱侧凸患者面和朝向医务人员面的双面触屏显示机构,进行触屏操作和治疗过程状态显示。
39.优选的,所述脊柱侧凸矫正机构包括:
40.升降模组单元,用于带动脊柱侧凸康复机器人的机械臂进行升降上下移动;升降模组单元至少包括2个升降模组;每个升降模组包括:升降电机组和限位传感器组;
41.多轴机械臂组单元,用于带动脊柱侧凸矫正腕手进行水平方向移动,推动脊柱侧凸矫正腕手;多轴机械臂组单元至少包括4个多轴机械臂组;多轴机械臂组包括:机械转轴组和力传感器组;机械转轴组连接安装在升降模组上,力传感器组具有多个力传感器,安装于机械转轴组的转动支点及其连杆连接处;多轴机械臂组具有空间三维xyz 3个方向转轴,带动脊柱侧凸矫正腕手,使脊柱侧凸矫正腕手施力点达到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转;为患者矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;并通过医护人员在医务操作双面触屏显示机构的界面设置,同时控制机械臂自动沿垂直轴升降、旋转并为患者提供多自由度的矫正力;
42.脊柱侧凸矫正腕手,用于在机械臂的带动下定位到脊柱侧凸患者矫正治疗的位置,进行脊柱侧凸矫正;
43.摄像采集模块,用于通过设置可调角度摄像头,采集多角度治疗过程图像。
44.优选的,所述多倾角骨盆固定机构包括:
45.多自由度座椅单元,用于脊柱侧凸患者进行多体姿受力矫正治疗;多自由度座椅单元包括:座椅电机组、座椅夹板电机模组、座椅电机限位传感器组、座椅夹板电机限位传感器组和座椅夹板力传感器组;座椅电机组包括:座椅调节驱动电机和座椅调节支撑电缸,座椅调节支撑电缸通过螺栓固定连接座椅调节驱动电机的转动轴;多体姿受力矫正治疗包括:坐姿受力矫正治疗、站姿受力矫正治疗、斜躺受力矫正治疗;多自由度座椅单元的椅面由抽拉式多层板组成,抽拉式多层板的外层板连接座椅调节支撑电缸,内层板通过滑轨连接外层板,内层板拉出后椅面伸长延伸成床形板面,并通过板面角度调整用于脊柱侧凸患者进行斜躺受力矫正治疗;多自由度座椅单元移出治疗位后,脊柱侧凸患者进行站姿受力矫正治疗;
46.多自由度座椅单元上设置有骨盆固定夹板,用于通过座椅夹板电机模组驱动固定脊柱侧凸患者的骨盆;
47.座椅调节支撑电缸,用于支撑多自由度座椅单元并进行一个或多个自由升降、倾斜,使多自由度座椅单元向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置;座椅调节支撑电缸数量为至少三个;当骨盆到正常位置时,基于骨盆在正常位置的情况下为患
者进行脊柱侧凸治疗;当三个电缸同步上升或下降,则抬高多自由度座椅单元或降低多自由度座椅单元;当三个电缸的降低或升高的程度不一样,进行多自由度座椅单元的多倾斜角度调节。
48.优选的,所述承载框架及护手机构包括:
49.系统支撑框架,用于提供系统所有机电气液部件的支撑框架,临床医务工作者从患者背部监测包括患者cobb角在内的各项脊柱侧凸参数;
50.手扶护手架,用于患者在治疗过程中放置双手,手扶护手架安装位置包括:机器人机械臂上方位置、机器人龙门立柱手扶位置、机器人龙门横梁手扶位置;
51.优选的,所述双面触屏显示机构包括:
52.医务操作面触屏显示单元,用于医务操作者观察脊柱侧凸康复治疗过程,通过医生触摸屏进行治疗过程操作;
53.急停按钮组安全防护单元,用于在紧急状况下对康复机器人系统进行急停安全防护;
54.患者观察面触屏显示单元,用于通过患者显示屏显示矫正康复过程,脊柱侧凸患者对自己的治疗过程和治疗效果进行观察,并通过触屏进行治疗过程医护需求操作。
55.相比现有技术,本发明至少包括以下有益效果:
56.能够利用读取的医疗影像数据、检测的患者体态数据、及患者的实时治疗状态,上传到云端并通过大数据分析计算出适宜的治疗方案参数并回传到本地;脊柱侧凸康复机器人能够提供精准三维矫正力;脊柱侧凸康复机器人能够提供夹紧骨盆并自由升降、座椅能够伸长延伸成矫正床并能多角度倾斜,使患者进行多方位受力矫正治疗;患者在治疗过程中,能够通过实时的反馈来知晓治疗过程及效果;利用机器人、大数据、云计算等技术,获得相关的治疗结果,可进一步用于后续治疗或其它患者的治疗参考,以及用于指导家用版治疗设备的治疗处方及日常佩戴的支具的设计;
57.本发明方案中,脊柱侧凸康复机器人可以同时胜任c型脊柱侧凸治疗和s型脊柱侧凸治疗;可以使施力点到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转,并为患者提供三维推力,从而实现三维空间上的多自由度自动化施力治疗,针对性地矫正脊柱侧凸的侧弯和椎体的旋转;同时,座椅向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置,为患者提供更加精准的脊柱侧凸治疗;并可以实现任意倾斜角度的调节;座椅还可以移动到治疗位外侧;使患者进行更多方位受力矫正治疗,多方位受力矫正治疗包括:坐位受力矫正治疗、站位受力矫正治疗以及斜躺位受力矫正治疗;脊柱侧凸康复机器人还提供护手架,以便让患者在治疗过程中放置双手,缓解疲劳以坚持治疗过程所需时间;患者治疗过程中,患者的后背可以正常暴露,相应的推力臂、座椅、显示屏、护手架等装置不影响临床工作者从患者背部监测患者的cobb角等脊柱侧凸参数;脊柱侧凸康复机器人还可提供头部牵引装置,以便消除头颅重力对脊柱的压迫,从而使治疗更有效果;脊柱侧凸康复机器人中的机械臂位置、施力大小及方向、座椅夹板夹力大小、倾斜角度等,均可通过控制界面进行设置,经操作者确认后,自动以患者舒适的方式达到预设效果,无需过多的手工调整;可以同时提供至少4点施力,满足c型和s型脊柱侧凸的治疗场景;
58.可以为脊柱侧凸患者提供多自由度的自动三维立体施力方案;即施力方向可沿垂直轴升降及旋转;可以在脊柱侧凸治疗时,提供让患者骨盆固定在正常解剖位的座椅;患者
在治疗过程中,可以祼露后背供临床工作者使用影像设备测量脊柱侧凸程度;患者可以在治疗设备中有较开阔的空间,更易于配合治疗;治疗过程中,施力大小、施力方向均可通过程序设定,无需临床工作者手动操作机械臂,即可实施自动矫正施力治疗;治疗过程中,为患者提供显示屏,可以显示正在实施的治疗步骤,并有显示患者后背图像,以便让患者知晓矫正后的形态,增强治疗信心;矫正效果的各项参数配置,可以保存本地、上传云端,用于后续患者的支具设计优化提供数据支持;可以根据患者脊柱侧凸的情况可提供坐姿、站姿以及斜躺等多种治疗方式;配置至少一个摄像头,并实时摄录患者治疗时的后背图像;可以让患者知晓正在实施的治疗步骤;脊柱侧凸康复机器人的相关设置参数,以及患者相关信息,可以存储在本地或上传到云端,为患者自身及其他患者的脊柱侧凸康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据。
59.本发明所述的具有云存储功能的智能化脊柱侧凸康复机器人,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
60.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
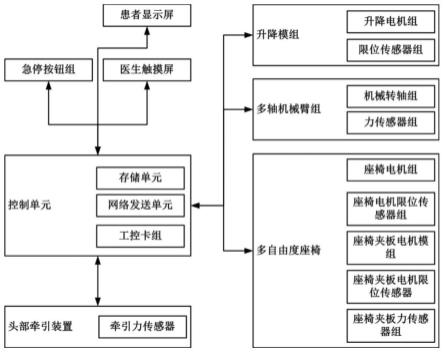
61.图1为本发明所述的具有云存储功能的智能化脊柱侧凸康复机器人系统框图。
62.图2为本发明所述的具有云存储功能的智能化脊柱侧凸康复机器人实施例1图。
63.图3为本发明所述的具有云存储功能的智能化脊柱侧凸康复机器人实施例2图。
64.图4为本发明所述的具有云存储功能的智能化脊柱侧凸康复机器人的多自由度座椅单元实施例图。
具体实施方式
65.下面结合附图以及实施例对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施;如图1-4所示,本发明提供了一种具有云存储功能的智能化脊柱侧凸康复机器人,包括:
66.头部支撑脑电及近红外监测模块,用于在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并监测脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号,调校矫正施力;
67.脊柱侧凸体态检测模块,用于检测脊柱侧凸患者的脊柱侧凸状态及体型状态;
68.特定性参数云分析模块,用于将脊柱侧凸体态检测结果及医疗检查数据传输到云存储分析系统,自动生成脊柱侧凸患者特定适应性参数;
69.程控及执行机器人模块,用于将特定个体化参数导入脊柱侧凸康复控制程序,控制康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正。
70.上述技术方案的工作原理为,本发明提出了一种具有云存储功能的智能化脊柱侧凸康复机器人,包括:头部支撑脑电及近红外监测模块,用于在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并监测脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号,调校矫正施力;脊柱侧凸体态检测模块,用于检测脊柱侧凸患者的脊柱侧凸状态及
体型状态;特定性参数云分析模块,用于将脊柱侧凸体态检测结果及医疗检查数据传输到云存储分析系统,自动生成脊柱侧凸患者特定适应性参数;程控及执行机器人模块,用于将特定个体化参数导入脊柱侧凸康复控制程序,控制康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正;本发明方案中,脊柱侧凸康复机器人的矫正机构中至少2个升降模组及4个机械臂,可以同时胜任c型脊柱侧凸治疗和s型脊柱侧凸治疗;每个机械臂均可以沿升降模组上下移动,同时机械臂具有至少3个转轴,从而可以使施力点到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转,并为患者提供三维推力,从而实现三维空间上的多自由度自动化施力治疗;同时,脊柱侧凸康复机器还提供座椅,座椅上有夹板,可以自动固定患者的骨盆;座椅由三个电缸支撑,并且可以一个或多个自由度升降、倾斜,使座椅向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置后,再为患者提供脊柱侧凸治疗;若三个电缸同步上升或下降,则可以抬高座椅或降低座椅;若三个电缸的降低或升高的程度不一样,则可以实现任意倾斜角度的调节;座椅还可以移走,方便患者进行更多姿势如站位等情况下的受力矫正治疗;脊柱侧凸康复机器人还提供护手架,让患者在治疗过程中放置双手;患者治疗过程中,患者的后背可以正常暴露,相应的推力臂、座椅、显示屏、护手架等装置不影响临床工作者从患者背部利用脊柱侧凸评估设备监测患者的cobb角等脊柱侧凸参数;脊柱侧凸康复机器人还可提供头部牵引装置,以便消除头颅重力对脊柱的压迫;脊柱侧凸康复机器人中的机械臂位置、施力大小及方向、座椅夹板夹力大小、倾斜角度等,均可通过控制界面进行设置,经操作者确认后,自动以患者舒适的方式达到预设效果。
71.上述技术方案的有益效果为,本发明一种具有云存储功能的智能化脊柱侧凸康复机器人,包括:头部支撑脑电及近红外监测模块,用于在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并监测脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号,调校矫正施力或反应治疗过程中的舒适度;脊柱侧凸体态检测模块,用于检测脊柱侧凸患者的脊柱侧凸状态及体型状态;特定性参数云分析模块,用于将脊柱侧凸体态检测结果及医疗检查数据传输到云存储分析系统,自动生成脊柱侧凸患者特定适应性参数;程控及执行机器人模块,用于将特定个体化参数导入脊柱侧凸康复控制程序,控制康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正;本发明方案中,脊柱侧凸康复机器人的矫正机构中至少2个升降模组及4个机械臂,可以同时胜任c型脊柱侧凸治疗和s型脊柱侧凸治疗;每个机械臂均可以沿升降模组上下移动,同时机械臂具有至少3个转轴,从而可以使施力点到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转,并为患者提供三维推力,从而实现三维空间上的多自由度自动化施力治疗;
72.同时,脊柱侧凸康复机器还提供座椅,座椅上有夹板,可以自动固定患者的骨盆;座椅由三个电缸支撑,并且可以一个或多个自由升降、倾斜,使座椅向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置后,再为患者提供脊柱侧凸治疗;若三个电缸同步上升或下降,则可以抬高座椅或降低座椅;若三个电缸的降低或升高的程度不一样,则可以实现任意倾斜角度的调节;
73.座椅还可以移走,方便患者进行更多姿势如站位等情况下的受力矫正治疗;脊柱侧凸康复机器人还提供护手架,以便让患者在治疗过程中放置双手,缓解疲劳以坚持治疗过程所需时间;患者治疗过程中,患者的后背可以正常暴露,相应的推力臂、座椅、显示屏、护手架等装置不影响临床工作者从患者背部监测患者的cobb角等脊柱侧凸参数;脊柱侧凸
康复机器人还可提供头部牵引装置,以便消除头颅重力对脊柱的压迫,从而使治疗更有效果;脊柱侧凸康复机器人中的机械臂位置、施力大小及方向、座椅夹板夹力大小、倾斜角度等,均可通过控制界面进行设置,经操作者确认后,自动以患者舒适的方式达到预设效果,无需过多的手工调整;可以同时提供至少4点施力,满足c型和s型脊柱侧凸的治疗场景;
74.可以为脊柱侧凸患者提供多自由度的自动三维立体施力方案;即施力方向可沿垂直轴升降及旋转;可以在脊柱侧凸治疗时,提供让患者骨盆固定在正常解剖位的座椅;患者在治疗过程中,可以祼露后背供临床工作者使用影像设备测量脊柱侧凸程度;患者可以在治疗设备中有较开阔的空间,更易于配合治疗;治疗过程中,施力大小、施力方向均可通过程序设定,无需临床工作者手动操作机械臂,即可实施自动矫正施力治疗;治疗过程中,为患者提供显示屏,可以显示正在实施的治疗步骤,并有显示患者后背图像,以便让患者知晓矫正后的形态,增强治疗信心;治疗过程中,尤其是矫正效果较好时的设备参数配置,可以保存本地、上传云端,用于后续患者的支具设计;可以根据患者脊柱侧凸的情况可提供坐姿、站姿以及斜躺等多种治疗方式;脊柱侧凸康复机器人,配置一个摄像头,并实时在患者屏幕上显示治疗时的后背图像;以便让患者知晓正在实施的治疗步骤;脊柱侧凸康复机器人的相关设置参数,以及患者相关信息,可以存储在本地或上传到云端,为患者自身及其他患者的脊柱侧凸康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据。
75.在一个实施中,所述头部支撑脑电及近红外监测模块包括:
76.头部支撑悬挂升降子模块,用于通过头部牵引装置在在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并通过头部牵引装置的牵引力传感器采集牵引力数据;
77.脑电及近红外信号采集传感器子模块,用于通过信号采集电极、近红外光传感器采集脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号;
78.电极、近红外光传感器连接监测跟踪子模块,用于根据脊柱侧凸患者脑电、脉搏、血氧饱和度及光神经快信号等生理信号辅助分析治疗过程是否适当,紧急状况及脊柱侧凸患者无法呼救时的紧急状况监护,医生通过脑电、脉搏、血氧饱和度及光神经快信号等生理信号监控脊柱侧凸患者状态,进一步调校矫正施力。
79.上述技术方案的工作原理为,利用机械牵引升降支撑与脑电及近红外信号采集传感检测,所述头部支撑脑电及近红外监测模块包括:头部支撑悬挂升降子模块,用于通过头部牵引装置在在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并通过头部牵引装置的牵引力传感器采集牵引力数据;脑电及近红外信号采集传感器子模块,用于通过信号采集传感器采集脊柱侧凸患者脑电、脉搏、血氧饱和度及光神经快信号;电极、近红外光传感器连接监测跟踪子模块,用于根据脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号辅助分析治疗过程是否适当,紧急状况及脊柱侧凸患者无法呼救时的紧急状况监护,医生通过脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号监控脊柱侧凸患者状态,进一步调校矫正施力。
80.上述技术方案的有益效果为,所述头部支撑脑电及近红外监测模块包括:头部支撑悬挂升降子模块,用于通过头部牵引装置在在脊柱矫正过程中对脊柱侧凸患者头部进行支撑,并通过头部牵引装置的牵引力传感器采集牵引数据;脑电及近红外信号采集传感器子模块,用于通过信号采集电极采集脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号
及大脑生理信号;脑电电极及近红外光传感器连接监测跟踪子模块,用于根据脊柱侧凸患者脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号辅助分析治疗过程是否适当,紧急状况及脊柱侧凸患者无法呼救时的紧急状况监护,医生通过脑电、脉搏、血氧饱和度、光神经快信号及大脑生理信号监控脊柱侧凸患者状态,进一步调校矫正施力。
81.在一个实施例中,所述脊柱侧凸体态检测模块包括:
82.脊柱侧凸状态检测子模块,用于读取脊柱侧凸医疗影像,辅助医生检测脊柱侧凸状态;
83.患者体型状态检测子模块,用于对脊柱侧凸患者的体型状态进行检测,检测患者身高、体重、bmi、皮脂厚度及三围数据;
84.康复状态监控检测子模块,用于对脊柱侧凸患者的治疗状态进行监控并检测治疗效果。
85.上述技术方案的工作原理为,利用脊柱侧凸状态检测与患者体型状态检测及康复状态监控检测进行监控并检测;所述脊柱侧凸体态检测模块包括:脊柱侧凸状态检测子模块,用于读取脊柱侧凸医疗影像数据,辅助医生检测脊柱侧凸状态;患者体型状态检测子模块,用于对脊柱侧凸患者的体型状态进行检测,检测患者身高、体重、bmi、皮脂厚度及三围数据;康复状态监控检测子模块,用于对脊柱侧凸患者的治疗状态进行监控并检测治疗效果。
86.上述技术方案的有益效果为,所述脊柱侧凸体态检测模块包括:脊柱侧凸状态检测子模块,用于读取脊柱侧凸医疗影像数据,辅助医生检测脊柱侧凸状态;患者体型状态检测子模块,用于对脊柱侧凸患者的体型状态进行检测,检测患者身高、体重、bmi、皮脂厚度及三围数据;康复状态监控检测子模块,用于对脊柱侧凸患者的治疗状态进行监控并检测治疗效果。
87.在一个实施中,所述特定性参数云分析模块包括:
88.云平台及数据传输子模块,用于将脊柱侧凸体态检测数据上传到云端,为患者自身及其他患者的脊柱侧凸康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据;
89.医疗检查数据存储子模块,用于对医疗检查数据进行传输,并将脊柱侧凸体态检测数据和医疗检查数据进行云端存储;
90.云端参数分析存储子模块,用于对脊柱侧凸体态检测数据和医疗检查数据进行云分析,自动生成脊柱侧凸患者特定适应性参数。
91.上述技术方案的工作原理为,根据云端数据传输、云存储及云分析进行脊柱侧凸体态检测数据云处理;所述特定性参数云分析模块包括:云平台及数据传输子模块,用于将脊柱侧凸体态检测数据上传到云端,为患者自身及其他患者的脊柱侧凸康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据;医疗检查数据存储子模块,用于对医疗检查数据进行传输,并将脊柱侧凸体态检测数据和医疗检查数据进行云端存储;云端参数分析存储子模块,用于对脊柱侧凸体态检测数据和医疗检查数据进行云分析,自动生成脊柱侧凸患者特定适应性参数。
92.上述技术方案的有益效果为,所述特定性参数云分析模块包括:云平台及数据传输子模块,用于将脊柱侧凸体态检测数据上传到云端,为患者自身及其他患者的脊柱侧凸
康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据;医疗检查数据存储子模块,用于对医疗检查数据进行传输,并将脊柱侧凸体态检测数据和医疗检查数据进行云端存储;云端参数分析存储子模块,用于对脊柱侧凸体态检测数据和医疗检查数据进行云分析,自动生成脊柱侧凸患者特定适应性参数;脊柱侧凸康复机器人,配置一个摄像头,并实时在患者屏幕上显示治疗时的后背图像;以便让患者知晓正在实施的治疗步骤;脊柱侧凸康复机器人的相关设置参数,以及患者相关信息,可以存储在本地或上传到云端,为患者自身及其他患者的脊柱侧凸康复机器人治疗、后续患者居家治疗、支具设计及调整提供参考及指导依据。
93.在一个实施中,所述程控及执行机器人模块包括:
94.云端数据导入程序子模块,用于将特定个体化参数及云存储数据导入控制单元;控制单元包括:存储单元、网络发送单元和工控卡组;参数数据通过网络发送单元导入控制单元并存储在本地存储单元;
95.侧凸康复程序控制子模块,用于读取本地存储单元的特定个体化参数并将特定个体化参数输入工控卡组侧凸康复程序,生成特定个体化侧凸康复程序;
96.控制与机器人执行子模块,用于通过特定个体化侧凸康复程序,控制脊柱侧凸康复机器人执行脊柱侧凸康复治疗过程,启动脊柱侧凸康复控制程序,控制脊柱侧凸康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正。
97.上述技术方案的工作原理为,通过网络数据传输及工控板组,将特定个体化参数及云存储数据导入控制单元的标准程序,并进行生成特定个体化侧凸康复程序生成;所述程控及执行机器人模块包括:云端数据导入程序子模块,用于将特定个体化参数及云存储数据导入控制单元;控制单元包括:存储单元、网络发送单元和工控卡组;参数数据通过网络发送单元导入控制单元并存储在本地存储单元;侧凸康复程序控制子模块,用于读取本地存储单元的特定个体化参数并将特定个体化参数输入工控卡组侧凸康复程序,生成特定个体化侧凸康复程序;控制与机器人执行子模块,用于通过特定个体化侧凸康复程序,控制脊柱侧凸康复机器人执行脊柱侧凸康复治疗过程,启动脊柱侧凸康复控制程序,控制脊柱侧凸康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正。
98.上述技术方案的有益效果为,所述程控及执行机器人模块包括:云端数据导入程序子模块,用于将特定个体化参数及云存储数据导入控制单元;控制单元包括:存储单元、网络发送单元和工控卡组;参数数据通过网络发送单元导入控制单元并存储在本地存储单元;侧凸康复程序控制子模块,用于读取本地存储单元的特定个体化参数并将特定个体化参数输入工控卡组侧凸康复程序,生成特定个体化侧凸康复程序;控制与机器人执行子模块,用于通过特定个体化侧凸康复程序,控制脊柱侧凸康复机器人执行脊柱侧凸康复治疗过程,启动脊柱侧凸康复控制程序,控制脊柱侧凸康复机器人执行机构,对脊柱侧凸患者进行特定智能化康复矫正。
99.在一个实施中,所述控制与机器人执行子模块包括:
100.脊柱侧凸矫正机构,用于为患者脊柱侧凸矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;
101.多倾角骨盆固定机构,用于自动固定患者的骨盆,调整患者的骨盆位置,并进行多倾斜角度的调节;
102.承载框架及护手机构,用于脊柱侧凸康复过程护手架,以便让患者在治疗过程中放置双手,缓解疲劳以坚持治疗过程所需时间;
103.双面触屏显示机构,用于通过朝向脊柱侧凸患者面和朝向医务人员面的双面触屏显示机构,进行触屏操作和治疗过程状态显示。
104.上述技术方案的工作原理为,根据三维空间多向受力及等效应力计算;所述控制与机器人执行子模块包括:脊柱侧凸矫正机构,用于为患者脊柱侧凸矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;多倾角骨盆固定机构,用于自动固定患者的骨盆,调整患者的骨盆位置,并进行多倾斜角度的调节;承载框架及护手机构,用于脊柱侧凸康复过程护手架,以便让患者在治疗过程中放置双手,缓解疲劳以坚持治疗过程所需时间;
105.双面触屏显示机构,用于通过朝向脊柱侧凸患者面和朝向医务人员面的双面触屏显示机构,进行触屏操作和治疗过程状态显示;计算脊柱侧凸矫正脊柱受力的等效应力,计算公式如下:
[0106][0107]
其中,fvmn表示脊柱侧凸矫正脊柱受力的等效应力,stc表示等效应力调整系数,此系数与脊柱侧凸患者侧凸程度、身体状态、患者体型、骨密度及肌耐力相关,基于医生医疗分析并结合云存储脊柱侧凸医疗大数据统计得出,fvm1表示脊柱侧凸第一矫正主应力,fvm2表示脊柱侧凸第二矫正主应力,fvm3表示脊柱侧凸第三矫正主应力;通过计算脊柱侧凸矫正脊柱受力的等效应力,矫正过程中的多矫正力应尽量达到矫正脊柱侧凸所需的最低矫正力,且不超过损伤脊柱的等效应力。
[0108]
上述技术方案的有益效果为,所述控制与机器人执行子模块包括:脊柱侧凸矫正机构,用于为患者脊柱侧凸矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;多倾角骨盆固定机构,用于自动固定患者的骨盆,调整患者的骨盆位置,并进行多倾斜角度的调节;承载框架及护手机构,用于脊柱侧凸康复过程护手架,以便让患者在治疗过程中放置双手,缓解疲劳以坚持治疗过程所需时间;双面触屏显示机构,用于通过朝向脊柱侧凸患者面和朝向医务人员面的双面触屏显示机构,进行触屏操作和治疗过程状态显示;计算脊柱侧凸矫正脊柱受力的等效应力,其中,fvmn表示脊柱侧凸矫正脊柱受力的等效应力,stc表示等效应力调整系数,此系数与脊柱侧凸患者侧凸程度、身体状态、患者体型、骨密度及肌耐力相关,基于医生医疗分析并结合云存储脊柱侧凸医疗大数据统计得出,fvm1表示脊柱侧凸第一矫正主应力,fvm2表示脊柱侧凸第二矫正主应力,fvm3表示脊柱侧凸第三矫正主应力;通过计算脊柱侧凸矫正脊柱受力的等效应力,矫正过程中的多矫正力应尽量达到矫正脊柱侧凸所需的最低矫正力,且不超过损伤脊柱的等效应力;从而提高矫正力精度及患者身体适应性。
[0109]
在一个实施中,所述脊柱侧凸矫正机构包括:
[0110]
升降模组单元,用于带动脊柱侧凸康复机器人的机械臂进行升降上下移动;升降模组单元至少包括2个升降模组;每个升降模组包括:升降电机组和限位传感器组;
[0111]
多轴机械臂组单元,用于带动脊柱侧凸矫正腕手进行水平方向移动,推动脊柱侧凸矫正腕手;多轴机械臂组单元至少包括4个多轴机械臂组;多轴机械臂组包括:机械转轴
组和力传感器组;机械转轴组连接安装在升降模组上,力传感器组具有多个力传感器,安装于机械转轴组的转动支点及其连杆连接处;多轴机械臂组具有空间三维xyz 3个方向转轴,带动脊柱侧凸矫正腕手,使脊柱侧凸矫正腕手施力点达到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转;为患者矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;并通过医护人员在医务操作双面触屏显示机构的界面设置,同时控制机械臂自动沿垂直轴升降、旋转并为患者提供多自由度的矫正力;
[0112]
脊柱侧凸矫正腕手,用于在机械臂的带动下定位到脊柱侧凸患者矫正治疗的位置,进行脊柱侧凸矫正;
[0113]
摄像采集模块,用于通过设置可调角度摄像头,采集多角度治疗过程图像。
[0114]
上述技术方案的工作原理为,根据牵引升降及多自由度支点连杆和摄像采集;所述脊柱侧凸矫正机构包括:升降模组单元,用于带动脊柱侧凸康复机器人的机械臂进行升降上下移动;升降模组单元至少包括2个升降模组;每个升降模组包括:升降电机组和限位传感器组;多轴机械臂组单元,用于带动脊柱侧凸矫正腕手进行水平方向移动,推动脊柱侧凸矫正腕手;多轴机械臂组单元至少包括4个多轴机械臂组;多轴机械臂组包括:机械转轴组和力传感器组;机械转轴组连接安装在升降模组上,力传感器组具有多个力传感器,安装于机械转轴组的转动支点及其连杆连接处;多轴机械臂组具有空间三维xyz 3个方向转轴,带动脊柱侧凸矫正腕手,使脊柱侧凸矫正腕手施力点达到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转;为患者矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗;并通过医护人员在医务操作双面触屏显示机构的界面设置,同时控制机械臂自动沿垂直轴升降、旋转并为患者提供多自由度的矫正力;脊柱侧凸矫正腕手,用于在机械臂的带动下定位到脊柱侧凸患者矫正治疗的位置,进行脊柱侧凸矫正;摄像采集模块,用于通过设置可调角度摄像头,采集多角度治疗过程图像。
[0115]
上述技术方案的有益效果为,所述脊柱侧凸矫正机构包括:升降模组单元,用于带动脊柱侧凸康复机器人的机械臂进行升降上下移动;升降模组单元至少包括2个升降模组;每个升降模组包括:升降电机组和限位传感器组;多轴机械臂组单元,用于带动脊柱侧凸矫正腕手进行水平方向移动,推动脊柱侧凸矫正腕手;多轴机械臂组单元至少包括4个多轴机械臂组;多轴机械臂组包括:机械转轴组和力传感器组;机械转轴组连接安装在升降模组上,力传感器组具有多个力传感器,安装于机械转轴组的转动支点及其连杆连接处;多轴机械臂组具有空间三维xyz 3个方向转轴,带动脊柱侧凸矫正腕手,使脊柱侧凸矫正腕手施力点达到患者的躯干任意部位,并且使推力方向沿垂直轴升降或旋转;为患者矫正提供三维推力,实现三维空间上的多自由度自动化施力治疗,并保障推力安全有效;并通过医护人员在医务操作双面触屏显示机构的界面设置,同时控制机械臂自动沿垂直轴升降、旋转并为患者提供多自由度的矫正力;脊柱侧凸矫正腕手,用于在机械臂的带动下定位到脊柱侧凸患者矫正治疗的位置,进行脊柱侧凸矫正;摄像采集模块,用于通过设置可调角度摄像头,采集多角度治疗过程图像;可以为脊柱侧凸患者提供多自由度的自动三维立体施力方案;即施力方向可沿垂直轴升降及旋转;可以在脊柱侧凸治疗时,提供让患者骨盆固定在正常解剖位的座椅;患者在治疗过程中,可以祼露后背供临床工作者使用影像设备测量脊柱侧凸程度;患者可以在治疗设备中有较开阔的空间,更易于配合治疗;治疗过程中,施力大小、施力方向均可通过程序设定,无需临床工作者手动操作机械臂,即可实施自动矫正施力治
疗;治疗过程中,为患者提供显示屏,可以显示正在实施的治疗步骤,并有显示患者后背图像,以便让患者知晓矫正后的形态,增强治疗信心。
[0116]
在一个实施例中,所述多倾角骨盆固定机构包括:
[0117]
多自由度座椅单元,用于脊柱侧凸患者进行多体姿受力矫正治疗;多自由度座椅单元包括:座椅电机组、座椅夹板电机模组、座椅电机限位传感器组、座椅夹板电机限位传感器组和座椅夹板力传感器组;座椅电机组包括:座椅调节驱动电机和座椅调节支撑电缸,座椅调节支撑电缸通过螺栓固定连接座椅调节驱动电机的转动轴;多体姿受力矫正治疗包括:坐姿受力矫正治疗、站姿受力矫正治疗、斜躺受力矫正治疗;多自由度座椅单元的椅面由抽拉式多层板组成,抽拉式多层板的外层板连接座椅调节支撑电缸,内层板通过滑轨连接外层板,内层板拉出后椅面伸长延伸成床形板面,并通过板面角度调整用于脊柱侧凸患者进行斜躺受力矫正治疗;多自由度座椅单元移出治疗位后,脊柱侧凸患者进行站姿受力矫正治疗;
[0118]
多自由度座椅单元上设置有骨盆固定夹板,用于通过座椅夹板电机模组驱动固定脊柱侧凸患者的骨盆;
[0119]
座椅调节支撑电缸,用于支撑多自由度座椅单元并进行一个或多个自由升降、倾斜,使多自由度座椅单元向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置;座椅调节支撑电缸数量为至少三个;当骨盆到正常位置时,基于骨盆在正常位置的情况下为患者进行脊柱侧凸治疗;当三个电缸同步上升或下降,则抬高多自由度座椅单元或降低多自由度座椅单元;当三个电缸的降低或升高的程度不一样,进行多自由度座椅单元的多倾斜角度调节。
[0120]
上述技术方案的工作原理为,根据多轴电机组、抽拉式多层板叠加及三角支点稳定;所述多倾角骨盆固定机构包括:多自由度座椅单元,用于脊柱侧凸患者进行多体姿受力矫正治疗;多自由度座椅单元包括:座椅电机组、座椅夹板电机模组、座椅电机限位传感器组、座椅夹板电机限位传感器组和座椅夹板力传感器组;座椅电机组包括:座椅调节驱动电机和座椅调节支撑电缸,座椅调节支撑电缸通过螺栓固定连接座椅调节驱动电机的转动轴;多体姿受力矫正治疗包括:坐姿受力矫正治疗、站姿受力矫正治疗、斜躺受力矫正治疗;多自由度座椅单元的椅面由抽拉式多层板组成,抽拉式多层板的外层板连接座椅调节支撑电缸,内层板通过滑轨连接外层板,内层板拉出后椅面伸长延伸成床形板面,并通过板面角度调整用于脊柱侧凸患者进行斜躺受力矫正治疗;多自由度座椅单元移出治疗位后,脊柱侧凸患者进行站姿受力矫正治疗;多自由度座椅单元上设置有骨盆固定夹板,用于通过座椅夹板电机模组驱动固定脊柱侧凸患者的骨盆;座椅调节支撑电缸,用于支撑多自由度座椅单元并进行一个或多个自由升降、倾斜,使多自由度座椅单元向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置;座椅调节支撑电缸数量为至少三个;当骨盆到正常位置时,基于骨盆在正常位置的情况下为患者进行脊柱侧凸治疗;当三个电缸同步上升或下降,则抬高多自由度座椅单元或降低多自由度座椅单元;当三个电缸的降低或升高的程度不一样,进行多自由度座椅单元的多倾斜角度调节。
[0121]
上述技术方案的有益效果为,所述多倾角骨盆固定机构包括:多自由度座椅单元,用于脊柱侧凸患者进行多体姿受力矫正治疗;多自由度座椅单元包括:座椅电机组、座椅夹板电机模组、座椅电机限位传感器组、座椅夹板电机限位传感器组和座椅夹板力传感器组;
座椅电机组包括:座椅调节驱动电机和座椅调节支撑电缸,座椅调节支撑电缸通过螺栓固定连接座椅调节驱动电机的转动轴;多体姿受力矫正治疗包括:坐姿受力矫正治疗、站姿受力矫正治疗、斜躺受力矫正治疗;多自由度座椅单元的椅面由抽拉式多层板组成,抽拉式多层板的外层板连接座椅调节支撑电缸,内层板通过滑轨连接外层板,内层板拉出后椅面伸长延伸成床形板面,并通过板面角度调整用于脊柱侧凸患者进行斜躺受力矫正治疗;多自由度座椅单元移出治疗位后,脊柱侧凸患者进行站姿受力矫正治疗;多自由度座椅单元上设置有骨盆固定夹板,用于通过座椅夹板电机模组驱动固定脊柱侧凸患者的骨盆;座椅调节支撑电缸,用于支撑多自由度座椅单元并进行一个或多个自由升降、倾斜,使多自由度座椅单元向任意方向倾斜一定角度,从而调整患者的骨盆到正常位置;座椅调节支撑电缸数量为至少三个;当骨盆到正常位置时,基于骨盆在正常位置的情况下为患者进行脊柱侧凸治疗;当三个电缸同步上升或下降,则抬高多自由度座椅单元或降低多自由度座椅单元;当三个电缸的降低或升高的程度不一样,进行多自由度座椅单元的多倾斜角度调节;治疗过程中,可以根据患者脊柱侧凸的情况可提供坐姿、站姿以及斜躺等多种治疗方式。
[0122]
在一个实施中,所述承载框架及护手机构包括:
[0123]
系统支撑框架,用于提供系统所有机电气液部件的支撑框架,临床医务工作者从患者背部监测包括患者cobb角在内的各项脊柱侧凸参数;
[0124]
手扶护手架,用于患者在治疗过程中放置双手,手扶护手架安装位置包括:机器人机械臂上方位置、机器人龙门立柱手扶位置、机器人龙门横梁手扶位置;
[0125]
上述技术方案的工作原理为,检查侧弯的上端椎与下端椎,为侧弯中向脊柱侧弯凹侧倾斜度最大的椎体;脊柱侧弯凸侧的椎间隙较宽,而在凹侧椎间隙开始变宽的第一个椎体被认为不属于该弯曲的一部分,因此其相邻的一个椎体被认为是该弯曲的端椎;在上端椎的椎体上缘划一横线,同样在下端椎椎体的下缘划一横线;对此两横线各做一垂直线该二垂直线的交角为cobb角;所述承载框架及护手机构包括:系统支撑框架,用于提供系统所有机电气液部件的支撑框架,临床医务工作者从患者背部监测包括患者cobb角在内的各项脊柱侧凸参数;手扶护手架,用于患者在治疗过程中放置双手,手扶护手架安装位置包括:机器人机械臂上方位置、机器人龙门立柱手扶位置、机器人龙门横梁手扶位置;
[0126]
上述技术方案的有益效果为,所述承载框架及护手机构包括:系统支撑框架,用于提供系统所有机电气液部件的支撑框架,临床医务工作者从患者背部监测包括患者cobb角在内的各项脊柱侧凸参数;手扶护手架,用于患者在治疗过程中放置双手,手扶护手架安装位置包括:机器人机械臂上方位置、机器人龙门立柱手扶位置、机器人龙门横梁手扶位置;可以提供系统所有机电气液部件的支撑框架,更全面的监测包括患者cobb角在内的各项脊柱侧凸参数;患者在治疗过程中放置双手可以使治疗过程身体肌肉群状态自然放松,避免长时间治疗肌肉疲劳,提高患者治疗治疗效果。
[0127]
在一个实施中,所述双面触屏显示机构包括:
[0128]
医务操作面触屏显示单元,用于医务操作者观察脊柱侧凸康复治疗过程,通过医生触摸屏进行治疗过程操作;
[0129]
急停按钮组安全防护单元,用于在紧急状况下对康复机器人系统进行急停安全防护;
[0130]
患者观察面触屏显示单元,用于通过患者显示屏显示矫正康复过程,脊柱侧凸患
者对自己的治疗过程和治疗效果进行观察,并通过触屏进行治疗过程医护需求操作。
[0131]
上述技术方案的工作原理为,根据双触控屏显示触控,急停按钮组安全防护;所述双面触屏显示机构包括:医务操作面触屏显示单元,用于医务操作者观察脊柱侧凸康复治疗过程,通过医生触摸屏进行治疗过程操作;急停按钮组安全防护单元,用于在紧急状况下对康复机器人系统进行急停安全防护;患者观察面触屏显示单元,用于通过患者显示屏显示矫正康复过程,脊柱侧凸患者对自己的治疗过程和治疗效果进行观察,并通过触屏进行治疗过程医护需求操作。
[0132]
上述技术方案的有益效果为,所述双面触屏显示机构包括:医务操作面触屏显示单元,用于医务操作者观察脊柱侧凸康复治疗过程,通过医生触摸屏进行治疗过程操作;急停按钮组安全防护单元,用于在紧急状况下对康复机器人系统进行急停安全防护;患者观察面触屏显示单元,用于通过患者显示屏显示矫正康复过程,脊柱侧凸患者对自己的治疗过程和治疗效果进行观察,并通过触屏进行治疗过程医护需求操作;能够进行医务操作及患者观察的及时交流互动,并能够在紧急状况下对系统及医护与患者进行全面及时安全防护。
[0133]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节与这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1