基于绳索驱动的手部康复外骨骼及其康复训练方法
本发明涉及外骨骼机器人,特别是涉及一种基于绳索驱动的手部康复外骨骼及其康复训练方法。
背景技术:
1、根据世界卫生组织报告,全球每年新增有数千万个中风患者,我国约占1/3,近年来,中风病在我国的发病率继续增加,具有极其高的致残率和致死率,多发于中老年人。在脑卒中的诸多后遗症中,手部功能障碍是脑卒中后偏痛患者最常见的障碍之一。中风后偏瘫患者容易出现瘫痪的手部肿痛,患侧手的关节屈伸困难,后期则容易出现手部肌肉萎缩,手掌变平,最后导致手的运动功能永久性的丧失。手部精细运动发生障碍,会严重影响患者日常生活活动。传统的康复方法一般有医生和医疗师进行辅助康复,然而随着脑中卒发病率的增加,康复医师和康复资源却十分置乏,除此之外,这种被动的接受康复,不仅不能让患者得到实时的治疗效果反馈信息,还缺乏主动性。因此,许多患者选择在家里自行训练,可能会导致训练强度不够、训练方法不够科学性,从而贻误了康复的最佳时机。
2、随着机器人计算机科学技术的发展,机器人辅助康复技术开始应用于康复医疗领域,手部康复机器人目前已经成为一个有效的解决方案,手部外骨骼康复机器人,一种机电一体化装置,可以穿戴在患者手部,帮助患者康复,提供可控的力和力矩。利用手部医疗机器人可以减轻医生的负担,并且解决康复医师和康复资源紧缺的问题。通过穿戴手部外骨骼康复机器人,患者可以根据强度自行训练,也可以长时间,重复性锻炼。由于力和力矩由电机产生,可以自己制定康复方案和内容,可以实时得到自己的康复信息,根据得到的康复信息,康复数据,不断优化适合自己训练强度和科学的训练方法。基于机器人的康复方案和传统疗法对患者事实上产生类似的积极效果。但机器人和辅助设备的主要优势是执行高治疗剂量同时提供半独立运动,这已被证明可以增加动力。
3、现有的手部外骨骼机器人,在手上安装方式来看,主要有两种,分别是,外骨骼式和内置手掌式,分别在手背一侧和手心一侧,它们的牵引方式也不一样,外骨骼式康复机器人一般由转动关节牵引,即每一个生物手的关节都有转动关节,都需要牵引。而内置手掌式康复机器人大多是末端牵引运动,因为手指的掌指关节、近端指间关节、远端指间关节之间具有耦合关系,因此该种康复机器人可驱动手指运动的范围较小,且手部无法触及和操纵物体而进行抓取训练。传统的纯刚性外骨骼手部康复机器人,质量大、自适应差、刚性冲击严重,而柔性外骨骼机器人虽然质量轻、贴合度高,但是其运动传递不准确、控制难度大,且它们通常无法在康复训练中提供足够的输出力,而手部运动障碍的中风患者,通常伸展手指比弯曲手指更加困难,有更大的阻力。
4、因此,需要研究运动传递准确,提供手指伸展过程中到每一个关节上的力或力矩,并兼具柔性的手部外骨骼机器人。
技术实现思路
1、本发明所要解决的技术问题是:针对以上问题,本发明的一种基于绳索驱动的手部康复外骨骼及其康复训练方法,采用绳索驱动的刚性连杆外骨骼机器人,可以通过绳索驱动杆关节,自适应人手关节,能为手部功能障碍患者提供期望的辅助力矩,帮助手部功能障碍患者康复训练。
2、为解决上述技术问题,本发明采用的一个技术方案是:
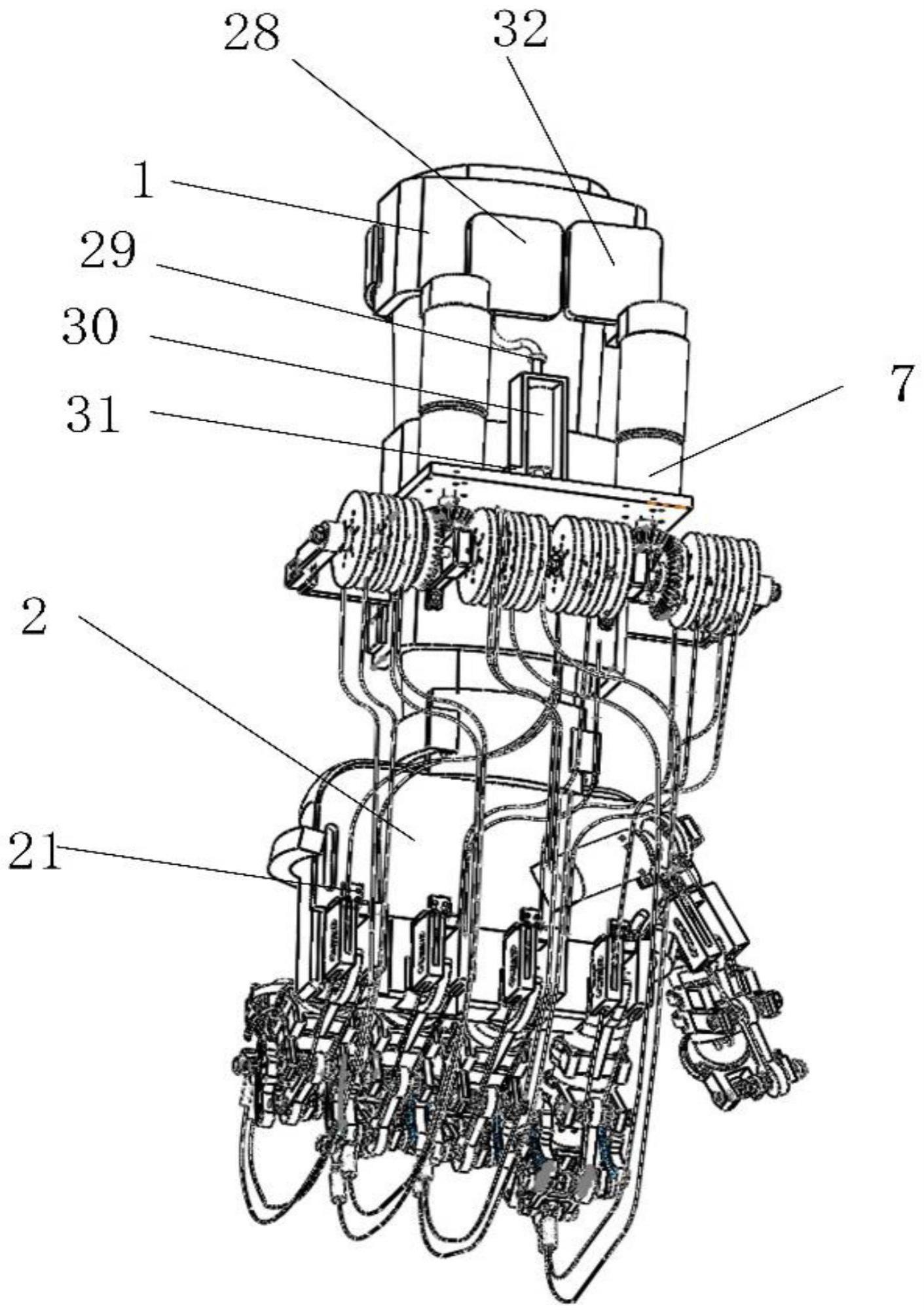
3、一种基于绳索驱动的手部康复外骨骼,包括控制系统、传感器系统、手指驱动器机构、佩戴于小臂部位的小臂杆件、佩戴于手背部位的手背杆件、分别佩戴于非大拇指上的四个手部康复外骨骼执行机构以及佩戴于大拇指上的大拇指康复机构;
4、所述手部康复外骨骼执行机构包括近端指间关节自适应机构和与近端指间关节自适应机构转动连接的远端指间关节康复闭环机构;
5、所述手指驱动机构包括分别固定设置于小臂杆件上的手指伸弯动力组件和指尖伸弯动力组件、固定设置于手背杆件上的大拇指伸弯动力组件、固定设置于手背杆件上的多组绳索传动机构,所述绳索传动机构包括绳索弹簧传动机构和滑轮组传动机构;
6、所述手指伸弯动力组件的动力输出端分别通过四组绳索传动机构的滑轮组传动机构与四个近端指间关节自适应机构的两个动力输入端对应传动连接,驱动四个近端指间关节自适应机构执行机构同步执行伸直动作或弯曲动作;
7、所述指尖伸弯动力组件的动力输出端分别通过四组绳索传动机构的绳索弹簧传动机构与四个远端指间关节康复闭环机构的两个动力输入端对应传动连接,驱动四个远端指间关节康复闭环机构同步执行伸直动作或弯曲动作;
8、所述大拇指伸弯动力组件的动力输出端通过一组滑轮组传动机构分别与大拇指康复机构的两个动力输入端对应传动连接,驱动大拇指康复机构执行伸直动作或弯曲动作;
9、所述控制系统固定设置于小臂杆件上并与手指驱动机构的控制端电连接,所述传感器系统安装于手指驱动机构的各个动力传动位置和指骨上并与控制系统传输连接,传感器系统检测手指驱动机构的运行状态信息并传送至控制系统。
10、进一步的,所述近端指间关节自适应机构包括佩戴于近指骨上的第三指套和佩戴于中指骨上的第二指套,所述第三指套的顶部转动连接有第一连杆,第一连杆的另一端转动连接有第二连杆,第二连接杆的另一端转动连接有滑块,所述第二指套的顶面固定设置有滑轨底座,所述滑块滑动嵌设于滑轨底座内;
11、所述滑块的顶部转动连接有推杆,推杆的另一端转动设置有滚子,所述第三指套的侧面固定连接有导向槽板,导向槽板上开设有第二凸轮槽,所述滚子滚动嵌设于第二凸轮槽内。
12、进一步的,所述远端指间关节康复闭环机构包括佩戴于远指骨上的第一指套,所述第一指套的顶部转动连接有第四连杆,第四连杆的另一端转动连接有第三连杆,且第四连杆的端部在该转动连接处的转轴两侧分别固定设置有绳索连接柱,第三连杆的另一端转动连接于滑块的顶部。
13、进一步的,所述手指伸弯动力组件和指尖伸弯动力组件均包括固定安装于小臂杆件上的减速器、固定连接于减速器动力输入端上的电机、固定连接于减速器动力输出端上的主动锥齿轮、转动安装于小臂杆件上并与主动锥齿轮啮合传动的从动锥齿轮以及与从动锥齿轮同轴设置的滑轮组;
14、所述大拇指伸弯动力组件包括固定安装于手背杆件上的第三减速器、固定连接于减速器动力输入端上的第三电机以及固定连接于第三减速器动力输出端上的第九滑轮。
15、进一步的,所述主动锥齿轮和从动锥齿轮的传动比为5~2:1。
16、进一步的,所述绳索弹簧传动机构包括用于拉伸手指的第一绳索和用于弯曲手指的第二绳索,所述第一绳索的一端和第二绳索的一端分别固定连接于指尖伸弯动力组件输出端的滑轮组中同一个滑轮的转轴两侧,第一绳索的另一端和第二绳索的另一端分别固定连接于同一个第四连杆转轴两侧的绳索连接柱上。
17、进一步的,所述滑轮组传动机构包括滑轮安装架、用于拉伸手指的第三绳索和用于弯曲手指的第四绳索,所述滑轮安装架的侧壁内开设有第一凸轮槽,所述第三指套靠近滑轮安装架的一侧设置有佩戴于近指骨上的上固定杆指套,固定杆指套上固定连接有固定杆,固定杆的端部两侧分别转动安装有第一动滑轮和第二动滑轮,第一动滑轮和第二动滑轮分别滚动嵌设于两侧的第一凸轮槽内;
18、滑轮安装架的一侧侧壁内分别转动安装有位于第一动滑轮上方的第一定滑轮、位于第一动滑轮下方的第二定滑轮和第三定滑轮,滑轮安装架的另一侧侧壁内分别转动安装有位于第二动滑轮上方的第四定滑轮和第五定滑轮、位于第二动滑轮下方的第六定滑轮,所述第一连杆的端部两侧分别固定连接有同轴设置的第七定滑轮和第八定滑轮;
19、所述第三绳索的一端和第四绳索的一端分别固定连接于手指伸弯动力组件输出端的滑轮组中同一个滑轮的转轴两侧,第三绳索的另一端经第一定滑轮的上侧依次绕过第一动滑轮和第二定滑轮再由第三定滑轮的上侧经第七定滑轮的顶部绕至第七定滑轮的底部并固定连接,所述第四绳索的另一端经第四定滑轮的下侧依次绕过第五定滑轮和第二动滑轮再由第六定滑轮的上侧经第八定滑轮的底部绕至第八定滑轮的顶部并固定连接。
20、进一步的,所述控制系统包括分别固定安装于小臂杆件上的单片机、电机控制器、锂电池、单片机开关和外骨骼急停开关,所述单片机与电机控制器连接,电机控制器分别与手指驱动器机构的动力源连接,所述传感器系统的各个信号输出端分别与单片机的信号输入端连接,所述锂电池分别单片机和电机控制器连接,所述外骨骼急停开关串接于锂电池的输出端,单片机开关串接于单片机的供电端。
21、还提出了一种基于绳索驱动的手部康复外骨骼的康复训练方法,包括以下步骤:
22、s10、手部功能障碍患者穿戴手部康复外骨骼后,启动单片机开关和外骨骼急停开关,进行系统的初始化;
23、s20、传感系统和控制系统启动运行;
24、s30、传感器系统中的各个角度传感器、拉力传感器、压力传感器和编码器采集穿戴者手部动作信息和手指驱动器机构的运动信息,并将采集的信息发送给单片机,单片机对接收到的信息数据进行实时分析处理,单片机发送指令控制至电机控制器;
25、s40、电机控制器根据接收的单片机的控制信号控制手指驱动器机构执行相应动作,辅助患者手指交替进行拉伸动作和弯曲动作;
26、s50、重复执行步骤s30和步骤s40,直至训练结束;
27、s60、训练结束后,关闭外骨骼急停开关和单片机开关,患者脱下手部康复外骨骼。
28、进一步的,步骤s40中,手指驱动器机构对控制信号的具体响应方式如下:
29、s401、手部康复外骨骼驱动手指进行弯曲动作:
30、手指伸弯动力组件通电并输出正向控制力矩,通过滑轮组传动机构驱动固定杆和近端指间关节自适应机构依次逆时针转动,固定杆驱动近指骨相对于手掌逆时针转动、近端指间关节自适应机构驱动中指骨相对于近指骨逆时针转动,从而驱动手指进行弯曲运动;
31、指尖伸弯动力组件通电并输出正向控制力矩,通过绳索弹簧传动机构驱动远端指间关节康复闭环机构逆时针转动,远端指间关节康复闭环机构驱动远指骨相对于中指古逆时针转动,从而驱动指尖进行弯曲运动;
32、大拇指伸弯动力组件通电并输出正向控制力矩,通过滑轮组传动机构驱动大拇指康复机构逆时针转动,大拇指康复机构驱动远指骨相对于近指骨逆时针转动,进而驱动大拇指进行弯曲运动;
33、s402、手部康复外骨骼驱动手指进行拉伸动作:
34、手指伸弯动力组件通电并输出反向控制力矩,通过滑轮组传动机构驱动固定杆和近端指间关节自适应机构依次顺时针转动,固定杆驱动近指骨相对于手掌顺时针转动、近端指间关节自适应机构驱动中指骨相对于近指骨顺时针转动,从而驱动手指进行拉伸运动;
35、指尖伸弯动力组件通电并输出反向控制力矩,通过绳索弹簧传动机构驱动远端指间关节康复闭环机构顺时针转动,远端指间关节康复闭环机构驱动远指骨相对于中指骨顺时针转动,从而驱动指尖进行拉伸运动;
36、大拇指伸弯动力组件通电并输出反向控制力矩,通过滑轮组传动机构驱动大拇指康复机构顺时针转动,大拇指康复机构驱动远指骨相对于近指骨顺时针转动,从而驱动大拇指进行拉伸运动。
37、与现有技术相比较,本发明的有益效果如下:
38、本发明主要用外骨骼式,相比于内置式,外骨骼式运动范围更大,手指得到大的运动范围,同时允许用手触及和操纵物体,这会使康复效果更好。绳索将力传递到杆关节,辅助手指屈曲、伸展,在手指弯曲和伸展的过程中,连杆运动传递准确。根据掌指关节关节和近端指间关节运动轨迹,设有运动轨迹凸轮,自适应曲柄滑块,提高患者在康复过程中的适应性和舒适性。
39、1.相较于现有的刚性执行器,本发明基于绳索驱动的手部康复外骨骼由绳索驱动,绳索驱动的执行器设计更加灵活,不需要与生物关节共线,有足够的绳索布线空间,执行器的动力驱动机构可以与执行器分别独立放置固定,从而提高使用者的使用舒适度以及减少执行器的重量,降低使用者的手部负担。
40、2.与现有技术中的由多个电机驱动一个手指进行运动相比较,本发明基于绳索驱动的手部康复外骨骼由一个电机驱动四个手指的远端指间关节,将绳索固定在滑轮上,通过绳索拉力引起弹簧的形变进行扭矩控制,为手部功能障碍患者提供可控的辅助扭矩。
41、3.本发明手部康复外骨骼的执行结构中的近端指间关节自适应机构,采用曲柄滑块机构,通过滑块在滑轨底座上的移动,自适应近端指关节,补偿运动过程中的关节错位,通过设置凸轮槽、自适应曲柄滑块机构,可提高设备的适应性和使用舒适性。又通过凸轮机构,检测手为了执行屈伸的运动而向机器人关节施加的力,曲柄滑块自适应机构自适应的效果,可由布置在凸轮机构上的压力传感器对比得到。
42、4.本发明基于绳索驱动的手部康复外骨骼,采用动、定滑轮组,通过绳索受力,拉动杆转动和拉动动滑轮在凸轮槽内移动,驱动近指骨和中指骨的弯曲或拉伸运动,绳索末端固定在杆关节上,绳索将力传递到杆关节,实现一根绳索驱动两个关节,辅助手指弯曲或伸展。
43、5.本发明基于绳索驱动的手部康复外骨骼采用绳索驱动的刚性连杆外骨骼机器人,基于中风患者的手指弯曲抓取能力和手指克服伸展阻力的需求,手部康复外骨骼穿戴性好,穿戴舒适,能适应不同手指尺寸的患者,适用于中风患者手部的康复训练。
- 还没有人留言评论。精彩留言会获得点赞!