一种基于机械臂按摩和电刺激的理疗方法、装置与流程
本技术涉及机器人理疗,具体而言,涉及一种基于机械臂按摩和电刺激的理疗方法、装置。
背景技术:
1、随着人口老龄化的加剧以及现代生活方式的改变,人们对健康和康复服务的需求日益增长。按摩作为一种传统的放松和治疗方法,已被广泛应用于缓解肌肉紧张、改善血液循环、促进身体康复等方面,然而,传统的人工按摩存在人力成本高、按摩师技术水平不一、难以长时间保持稳定的按摩力度和速度等问题。机械臂在医疗领域中的衍生技术产品为ai按摩理疗机器人,ai按摩理疗机器人的出现为缓解人体肌肉酸痛、模拟专业按摩提供了全新的解决方案。
2、然而,在实际使用过程中,ai按摩理疗机器人大部分是基于机械臂加上按摩头通过路径规划和按压力度预设,以此来替代现有的使用人工按摩理疗方式,即ai按摩理疗机器人的理疗手段太过单一。而电刺激理疗方式作为新兴的理疗方式已被广泛应用于疼痛管理、肌肉康复、神经恢复等多个领域,是一种利用电流刺激肌肉和神经组织,以达到理疗目的的方法。传统的电刺激理疗方式需要患者佩戴多个电极片,并且这些电极片需要粘贴在患者的治疗部位上,不仅操作繁琐,而且不便于更换位置,且电极片与皮肤的接触质量也会影响治疗效果,而若是将电刺激理疗方式与按摩理疗方式简单集成在一起,则两种理疗方式则会相互影响,无法发挥出最大的理疗效果。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种基于机械臂按摩和电刺激的理疗方法、装置,该一种基于机械臂按摩和电刺激的理疗方法、装置,提供了一种集成按摩理疗方式和电刺激理疗方式的机械臂,有效的解决了现有的ai按摩理疗机器人的理疗方式太过单一以及电刺激理疗方式与按摩理疗方式简单集成在一起存在相互影响的问题。
2、第一方面,本技术实施例提供了一种基于机械臂按摩和电刺激的理疗方法,适用于理疗系统,所述理疗系统包括治疗床、机械臂、控制器、力传感器,所述治疗床包括定位模块,所述机械臂的机械臂末端包括温度检测传感器、肌电传感器、电刺激按摩头和温度模块,所述方法包括:
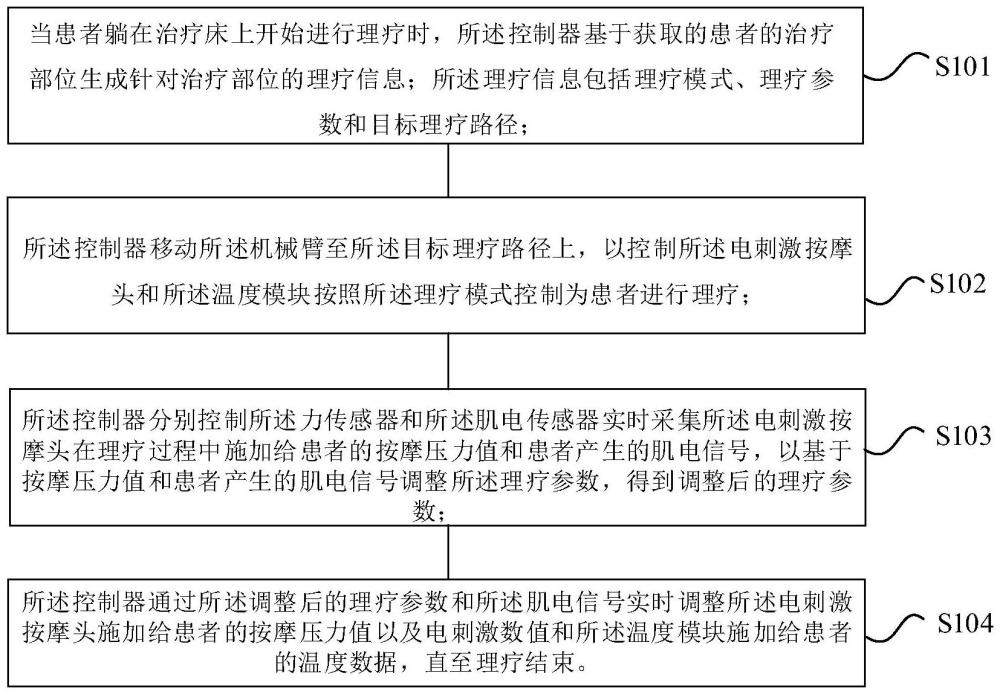
3、当患者躺在治疗床上开始进行理疗时,所述控制器基于获取的患者的治疗部位生成针对治疗部位的理疗信息;所述理疗信息包括理疗模式、理疗参数和目标理疗路径;
4、所述控制器移动所述机械臂至所述目标理疗路径上,以控制所述电刺激按摩头和所述温度模块按照所述理疗模式控制为患者进行理疗;
5、所述控制器控制定位模块实时采集患者在理疗过程中的实时位置,以基于患者的实时位置对所述目标理疗路径进行实时调整,得到调整后的目标理疗路径,以使所述控制器控制机械臂按照所述调整后的目标理疗路径进行移动;
6、所述控制器分别控制所述力传感器和所述肌电传感器实时采集所述电刺激按摩头在理疗过程中施加给患者的按摩压力值和患者产生的肌电信号,以基于按摩压力值和患者产生的肌电信号调整所述理疗参数,得到调整后的理疗参数;
7、所述控制器通过所述调整后的理疗参数和所述肌电信号实时调整所述电刺激按摩头施加给患者的按摩压力值以及电刺激数值和所述温度模块施加给患者的温度数据,直至理疗结束。
8、结合第一方面,本技术实施例提供了第一方面的第一种可能的实施方式,其中,所述理疗系统还包括陀螺仪;
9、所述控制器移动所述机械臂至所述目标理疗路径上,以控制所述电刺激按摩头和所述温度模块按照所述理疗模式控制为患者进行理疗,包括:
10、所述控制器基于所述陀螺仪采集到的机械臂的姿态信息与电刺激按摩头的位置信息进行融合,得到机械臂末端的位置信息,以基于机械臂末端的位置信息判断所述机械臂末端是否位于目标理疗路径上;
11、若否,则所述控制器控制所述机械臂移动至所述目标理疗路径上并进行理疗。
12、结合第一方面,本技术实施例提供了第一方面的第二种可能的实施方式,其中,所述控制器移动所述机械臂至所述目标理疗路径上,以控制所述电刺激按摩头和所述温度模块按照所述理疗模式控制为患者进行理疗,还包括:
13、所述控制器控制定位模块实时采集患者在理疗过程中的实时位置,以基于患者的实时位置对所述目标理疗路径进行实时调整,得到调整后的目标理疗路径;
14、所述控制器控制机械臂按照所述调整后的目标理疗路径进行移动。
15、结合第一方面,本技术实施例提供了第一方面的第三种可能的实施方式,其中,所述控制器控制机械臂按照所述调整后的目标理疗路径进行移动,包括:
16、所述控制器计算所述调整后的目标理疗路径的初始位置与机械臂末端的位置之间的位置偏差;
17、所述控制器基于pid算法通过所述位置偏差控制机械臂末端移动至所述调整后的目标理疗路径上。
18、结合第一方面,本技术实施例提供了第一方面的第四种可能的实施方式,其中,所述理疗系统还包括视觉传感器;
19、所述控制器基于获取的患者的治疗部位生成针对治疗部位的理疗信息,包括:
20、所述视觉传感器对患者的治疗部位进行自动识别与定位得到治疗部位信息,并将所述治疗部位信息发送至控制器;
21、所述控制器基于预置的治疗规划模型处理接收到的治疗部位信息,生成针对所述治疗部位的理疗信息。
22、结合第一方面,本技术实施例提供了第一方面的第五种可能的实施方式,其中,所述控制器分别控制所述力传感器和所述肌电传感器实时采集所述电刺激按摩头在理疗过程中施加给患者的按摩压力值和患者产生的肌电信号,包括:
23、所述控制器实接收所述力传感器采集的电刺激按摩头与患者皮肤接触面的按摩压力值,以判断所述按摩压力值是否在预置范围内;
24、若否,则所述控制器调整机械臂的姿态以使按摩压力值回归至预置范围内。
25、结合第一方面,本技术实施例提供了第一方面的第六种可能的实施方式,其中,所述控制器通过所述调整后的理疗参数和所述肌电信号实时调整所述电刺激按摩头施加给患者的按摩压力值以及电刺激数值和所述温度模块施加给患者的温度数据,直至理疗结束,包括:
26、所述控制器实时分析所述肌电信号,得到患者的身体状态实时数据,以根据患者状态实时数据调整理疗参数;
27、所述控制器基于所述调整后的理疗参数对所述电刺激按摩头施加给患者的按摩压力值以及电刺激数值和所述温度模块施加在患者身上的温度进行调整,直至理疗结束。
28、第二方面,本技术实施例提供了一种基于机械臂按摩和电刺激的理疗装置,所述装置包括:
29、获取模块,用于患者躺在治疗床上开始进行理疗时,所述控制器基于获取的患者的治疗部位生成针对治疗部位的理疗信息;所述理疗信息包括理疗模式、理疗参数和目标理疗路径;
30、移动模块,用于所述控制器移动所述机械臂至所述目标理疗路径上,以控制所述电刺激按摩头和所述温度模块按照所述理疗模式控制为患者进行理疗;
31、控制模块,用于所述控制器分别控制所述力传感器和所述肌电传感器实时采集所述电刺激按摩头在理疗过程中施加给患者的按摩压力值和患者产生的肌电信号,以基于按摩压力值和患者产生的肌电信号调整所述理疗参数,得到调整后的理疗参数;
32、调整模块,用于所述控制器通过所述调整后的理疗参数和所述肌电信号实时调整所述电刺激按摩头施加给患者的按摩压力值以及电刺激数值和所述温度模块施加给患者的温度数据,直至理疗结束。
33、第三方面,本技术实施例提供了一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行任意一项所述的一种基于机械臂按摩和电刺激的理疗方法的步骤。
34、第四方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行任意一项所述的一种基于机械臂按摩和电刺激的理疗方法的步骤。
35、本技术实施例提供的一种基于机械臂按摩和电刺激的理疗方法,适用于理疗系统,所述理疗系统包括治疗床、机械臂、控制器、力传感器,所述治疗床包括定位模块,所述机械臂的机械臂末端包括温度检测传感器、肌电传感器、电刺激按摩头和温度模块,所述方法首先在当患者躺在治疗床上开始进行理疗时,所述控制器基于获取的患者的治疗部位生成针对治疗部位的理疗信息;所述理疗信息包括理疗模式、理疗参数和目标理疗路径;其次所述控制器移动所述机械臂至所述目标理疗路径上,以控制所述电刺激按摩头和所述温度模块按照所述理疗模式控制为患者进行理疗;然后所述控制器分别控制所述力传感器和所述肌电传感器实时采集所述电刺激按摩头在理疗过程中施加给患者的按摩压力值和患者产生的肌电信号,以基于按摩压力值和患者产生的肌电信号调整所述理疗参数,得到调整后的理疗参数;最后所述控制器通过所述调整后的理疗参数和所述肌电信号实时调整所述电刺激按摩头施加给患者的按摩压力值以及电刺激数值和所述温度模块施加给患者的温度数据,直至理疗结束,本技术的机械臂末端设置有电刺激按摩头,所述电刺激按摩头集成了电刺激和按摩两种理疗方式,解决了现有的ai按摩理疗机器人存在的理疗方式太过单一的问题,并且电刺激按摩头上还设置了温度模块以及肌电传感器,从而对电刺激按摩头同时为患者进行电刺激理疗和按摩理疗时进行辅助,从而保证电刺激按摩头的理疗效果。
- 还没有人留言评论。精彩留言会获得点赞!